余弦相位BOC信号互相关延迟无模糊跟踪方法*
2022-08-26周艳玲袁志鑫高瑜那张若凡
周艳玲,袁志鑫,高瑜那,张若凡
(湖北大学 计算机与信息工程学院,武汉 430062)
0 引 言
全球导航卫星系统(Global Navigation Satellite System,GNSS)信号所占用的频带资源有限,导致信号之间频带拥挤和相互干扰严重,因此采用子载波的二进制偏移载波(Binary Offset Carrier,BOC)调制技术被提出。BOC信号具有尖锐主峰的自相关函数(Auto-correlation Function,ACF)和分离频谱的特点,使之能够与传统信号共享有限的频谱资源,而且针对热噪声和多径干扰可以提供较高的跟踪精度。目前,BOC信号在GNSS中得到了广泛的应用。然而,BOC调制信号的ACF有多个副峰,导致鉴别器的输出曲线存在多个误锁点[1],如果主峰没有正确锁定,将引起跟踪模糊问题。当需要高精度定位时,由跟踪模糊引起的伪距偏差测量是导航不可接受的[2]。因此,减轻或消除BOC信号跟踪中的模糊问题是有效发挥BOC信号固有的高精度和抗干扰优点的前提条件。相比于正弦相位BOC(Sine-phased BOC,SinBOC)信号,余弦相位BOC(Cosine-phased BOC,CosBOC)信号的ACF相对更加复杂[3],难以得到严谨简洁的数学表达式,且针对CosBOC信号的模糊解决方案研究较少,因此研究解决CosBOC信号的跟踪模糊问题非常有必要。
为了减少和消除跟踪模糊的影响,国内外提出了几类典型方法。
(1)峰跳(Bump Jump,BJ)法将当前跟踪的峰值与相邻左右两个峰值进行比较,根据比较结果进行跳转从而找到最大主峰值。假设正确跟踪到主峰时,BJ方法的跟踪性能达到BOC信号跟踪精度的理论值。但是实际情况有噪声,码跟踪环路很有可能会锁定在副峰上,此时需要时间进行检测和判断,会降低接收机的跟踪精度和动态性能[4]。
(2)类二进制相移键控(Binary Phase Shift Keying Like,BPSK Like)法将本地辅助信号设置为二进制相移键控(BPSK)调制信号,并将其调制到BOC信号频谱的主瓣的中心频率[5]。通过将辅助信号与接收到的BOC信号相关得到的互相关函数(Cross-correlation Function,CCF)只有一个主峰,类似于BPSK信号的ACF,能实现无模糊跟踪。接收信号与本地辅助信号之间的不匹配将导致信噪比的损失,从而降低跟踪精度。
(3)自相关边峰消除技术利用本地伪随机噪声码(Pseudo Random Noise,PRN)作为辅助信号与BOC信号进行相关运算,得到消除所有副峰的CCF。该方法消除了错误峰捕获的可能性,但它只能用于SinBOC信号,并且在热噪声影响下跟踪性能会有所下降[6]。
(4)伪相关函数(Pseudo Correlation Function,PCF)法[7]利用两个波形对称的本地辅助信号分别和BOC信号做相关运算获得互相关函数,再通过线性组合获得的仅有一个主峰的无模糊相关函数。但是BOC信号调制阶数增加时,相关函数的主峰高度会降低,码跟踪性能也会急剧下降。
(5)基于子互相关移位技术方法[8]通过形状码形成的子相关函数再经过组合处理得到无模糊相关函数作为鉴别器的输入。文献[8]中处理方式也仅适用于SinBOC信号。
针对CosBOC信号,本文基于互相关移位技术方法根据形状码向量设计本地辅助信号,通过对第一个辅助信号进行延迟操作获得第二个辅助信号,两个辅助信号分别与接收到的CosBOC信号做相关运算形成子互相关函数;子互相关函数进行延迟移位、线性组合和非线性处理后得到无模糊函数,再和CosBOC信号的ACF相乘后作为跟踪目标。最后针对实际使用信号CosBOC(10,5)给出了与BJ、BPSK Like和PCF方法相比的性能仿真结果。
1 BOC调制信号
接收机从导航卫星中接收到的BOC信号带通表达式为[9]
(1)
式中:A为信号功率;D(t)为导航信息数据码;C(t)为PRN码;χ(t)是BOC信号的子载波;n(t)为高斯白噪声,满足零均值和双边功率谱密度为N0的特性;fIF为载波中心频率;θ为载波初相位。
PRN码可以表示为
(2)
式中:ci表示第i个码片的符号值,ci∈(-1,1);TC是PRN码单位码片的持续时间;pC是一个持续时间为TC、幅度值为1的矩形方波信号;χ(t)表示BOC信号的子载波,分为正弦相位子载波和余弦相位子载波,它们通过取正弦和余弦函数的符号来生成。对于余弦相位子载波的BOC信号,本文将其表示为CosBOC(m,n),其中,m表示子载波频率fS与1.023 MHz的比值,n表示伪码码率fC与1.023 MHz的比值,m和n都被约束为正整数,m≥n。定义比率M=2m/n是正整数,称为调制系数,表示一个PRN码码片持续时间内子载波的数目[10]。于是,余弦相位子载波的数学表达式为
(3)
式中:dl表示为子载波的符号值,dl∈(-1,1);TS是子载波的半周期;pTS是一个持续时间为TS/2、振幅值为1的矩形方波信号。从式(3)中可以看出,子载波χ(t)是多个不同延迟的矩形方波信号pTS经过相加后形成的。于是,根据式(2)和式(3),可以得到CosBOC信号的基带表达式为
(4)
对于具有理想相关特性的PRN码的BOC信号来说,可以忽略PRN码的影响,其自相关函数可以等价为子载波的自相关函数,即有
RBOC(τ)=E[s(t)s(t+τ)]=E[χ(t)χ(t+τ)]=

ΛTS(τ)。
(5)
式中:τ表示码延迟。根据式(3)可知,子载波χ(t) 是由多个矩形方波组成,而一个矩形方波在TS/2内的自相关函数可以表示为底为TS、高为1的等腰三角函数ΛTS(τ)。
于是,综合式(4)、式(5)和子载波的自相关函数,CosBOC信号的自相关函数可以表示为[11]
(6)
根据文献[12]中定义的形状码,di和dj表示为相同的CosBOC信号形状码,其中i,j=0,1,2,…,2M-1。定义形状码向量d=[d1,d2,…,d2M-1]2M,di表示形状码向量d中的第i个形状码。
2 提出的方法
为了归一化处理,本地辅助信号的形状码向量需满足以下条件:
(8)
即一个TC内CosBOC信号的PRN码波形由2M个子形状码向量组成,称为辅助PRN码,用来构成接收机的本地辅助信号。新的辅助信号的形状码向量可以设计如下:
(9)
式中:k=0,1,2,…,2M-1。结合PRN码的表达式(式(2))和CosBOC信号的基带表达式(式(4)),可得到本地辅助信号Lk(t)的表达式为
(10)
根据辅助码的形状码向量和PRN码波形,通过延迟L0(t)波形kTS/2个距离就可以得到其他的Lk(t)波形,因此,式(10)可以改写成
(11)
结合式(6)关于RBOC(τ)的表达式,CosBOC信号与辅助信号的互相关函数可以表示为
(12)
式中:di是CosBOC信号的形状码向量d中的第i个形状码。结合式(11)中辅助信号Lk(t)的表达式和式(12)中RB/L(τ)的表达式,可以得到第k个互相关函数的表达式为

(13)
式中:dλ表示形状码向量d=[1,…,1]2M的第λ个形状码。
实际应用的CosBOC信号仅有伽利略系统中的CosBOC(10,5)和CosBOC(15,2.5)信号[13],为了便于表达,下文仅以CosBOC(10,5)信号为例,但分析方法也适用于其他CosBOC信号。根据定义,CosBOC(10,5)信号在一个TC内其PRN码形状码向量表示为d=[1,1,1,1,1,1,1,1]8。根据式(13)可以得到CosBOC(10,5)信号与不同辅助信号的互相关函数如图1所示。由于这些互相关函数两两对称,为了方便展示图1只显示了前四个波形的曲线。RB/Lk的波形可以由RB/L0延迟kTS/2个码片获得,并且RB/Lk和RB/L2M-1-k的波形关于零点位置左右对称。根据此特征,可以考虑通过延迟的方式和非线性处理来构造新的相关函数来消除CosBOC信号的跟踪模糊问题。针对CosBOC(10,5)信号对应的组合方式共有4对,由于分析方法相似,本文仅选择RB/L0和RB/L2M-1对进行分析,其他组合方式暂不赘述。

图1 CosBOC(10,5)信号对应的互相关函数波形
RB/L2M-1可以由RB/L0延迟(2M-1)TS/2码片得到,因此,接收机实际只需要一个本地辅助信号。经过计算分析,有两种非线性处理方式,可分别表示为
RC0=(|RB/L0|+|RB/L2M-1|)2-(RB/L0-RB/L2M-1)2=
数控机床是机电液一体化的复杂系统,为便于进行质量特性分析,首先要将数控机床分解为简单的基本单元以达到容易建模的目的,然后对基本单元进行质量特性分析,最后对整机的质量特性进行综合分析。按“部件—组件—零件”的分解方法虽然简单易行,但是在实际应用过程中却存在许多难以解决的困难,比如零件数目繁多导致的建模困难、零件故障数据缺乏导致的定量分析困难等。
(|RB/L0|+|RB/L0(τ-(2M-1))|)2-
(RB/L0-RB/L0(τ-(2M-1)))2,
(15)
RC1=(RB/L0+RB/L2M-1)2-(|RB/L0|-|RB/L2M-1|)2=
(RB/L0+RB/L0(τ-(2M-1)))2-

(16)
通过以上两种处理,可得到无模糊的相关函数RC0和RC1对应的波形如图2和3所示。
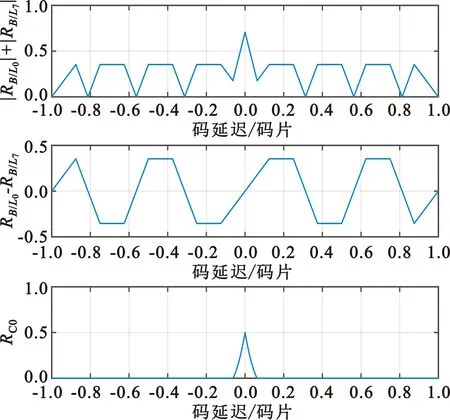
图2 CosBOC(10,5)信号的第一种组合对应的相关函数RC0
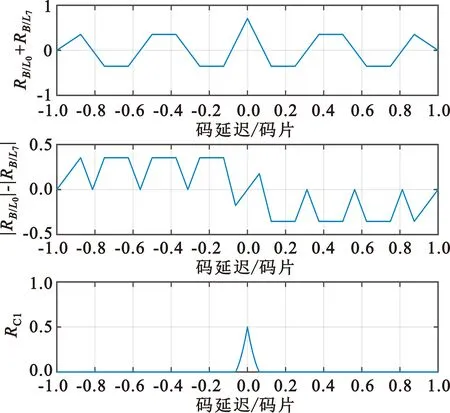
图3 CosBOC(10,5)信号的第二种组合对应的相关函数RC1
随着调制阶数M增大,本地辅助信号和CosBOC信号之间的相关性逐渐减弱,这会引起相关函数主峰宽度和峰值都变小。为了解决该问题,将RC0、RC1分别和CosBOC信号的ACF相乘,获得最终无模糊组合相关函数:
(17)
由于RC0和RC1波形完全相同,所以只呈现了Run0波形。如图4所示,Run0是完全无模糊且没有副峰的,本文后续研究以Run0为例来分析。

图4 CosBOC(10,5)信号的无模糊相关函数波形Run0
3 码跟踪环路模型
码跟踪环路模型如图5所示。接收机接收信号下变频到中频信号r(t)后,分别与本地载复现的同相I支路和正交Q支路相乘,解调出载波。I、Q支路信号分别与本地辅助信号的超前(E)和滞后(L)信号相关运算和积分清零后作为鉴别器的输入。相比PCF方法,本文提出的环路模型具有更少的信号支路,降低了其实现复杂度。

图5 码跟踪环路模型
在环路模型中,参数IE1和IL1分别表示本地辅助信号的超前支路和滞后支路与接收信号的同相相关器输出,QE1和QL1分别表示本地辅助信号的超前支路和滞后支路与接收信号的正交相关器输出,IEBOC、ILBOC、QEBOC和QLBOC对应着本地CosBOC信号的同相和正交相关器输出。
(18)
于是,Run0对应的鉴别器函数可简化为


(19)
式中:Δτ是码延迟的估计偏差,dC是超前和滞后相关器的间隔。假设前端带宽无限,当dC= 0.1码片时鉴别器输出曲线如图6所示。
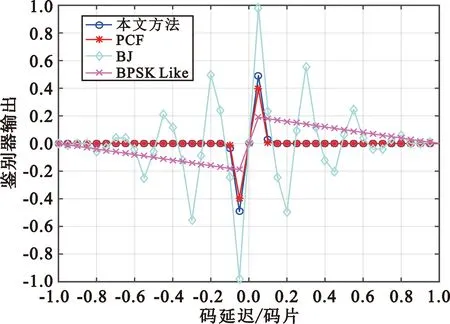
图6 CosBOC(10,5)信号的鉴别器输出曲线
从图6中可以看出,本文方法、BPSK Like方法和PCF方法的输出曲线都是无模糊跟踪。需要指出的是,BJ方法的结果采用的是假设理想的无模糊的情况,仅为其他方法提供理论值参考,实际情况下是存在模糊的。从输出曲线的斜率上看,本文方法的鉴别器输出曲线斜率要比BPSK Like方法大,与PCF方法斜率基本一致,表明本文方法的鉴别器增益与PCF方法相近而高于BPSK Like方法;从输出曲线的峰值上看,本文方法的峰值高于PCF方法和BPSK Like方法,预示着本文方法具有较好的跟踪性能。从输出曲线的线性牵引范围上看,本文方法的线性牵引范围与PCF方法一致,都是-dC/2~dC/2,而且小于BPSK Like方法,预示着本文方法具有较好的多径抑制潜能。
4 性能分析
4.1 码跟踪性能
热噪声是引起导航信号跟踪误差的重要因素,而闭环码跟踪误差是评价抗噪声性能的重要指标[14]。码跟踪误差可表示为
(20)
式中:BL是码环路滤波器带宽,单位是Hz;Tcoh为环路的相干积分时间;KV为鉴别器增益;σV为鉴别器的输出标准差。
从式(20)可以看出,要分析热噪声的影响,有必要分析鉴别器输出标准差和增益。首先假设载波初相位的误差Δθ=0。当Δτ=0时,I支路和Q支路的相关器输出满足联合高斯分布,即
(21)
上式中,均值μ和方差σ可以表示为
(22)
(23)
式中:RL0是本地辅助信号的自相关函数。假设此时环路处于稳定跟踪状态,根据式(21)~(23),可以通过蒙特卡洛仿真来获得环路模型8条支路的信号样本,然后通过统计学来求得本文方法的鉴别器输出标准差σV。此外,通过求解鉴别器输出曲线零点的导数,可以求出线性牵引范围内的归一化鉴别器增益KV,即
(24)
把鉴别器增益和输出标准差带入到式(20)中就可以求得本文方法的码跟踪误差标准差。仿真实验时,鉴别器的输出标准差通过设置50 000个信号样本抽样点求得,BL设为1 Hz,Tcoh=1 ms。
为了更准确地评估该方法,以实际应用信号CosBOC(10,5)信号对应的码跟踪误差标准差结果为例进行分析。当载噪比C/N0取值范围设为20~50 dB-Hz之间时,本文方法与其他方法的跟踪误差标准差曲线如图7所示。实际情况下由于存在噪声BJ方法很容易出现误锁现象,不能完全消除跟踪模糊。图7中给出的BJ方法在假设无误锁情况下的跟踪精度是其理论极限值,用于对比各种方法的性能。当C/N0<23 dB-Hz时,由于本地辅助信号与接收BOC信号不完全匹配,跟踪性能有所损失。当C/N0>23 dB-Hz时,本文方法的跟踪误差比PCF方法小,比BPSK Like方法稍大。这是由于本文方法的组合相关函数主峰较窄,鉴别器输出曲线有较高的鉴别器增益,导致了本文方法的抗热噪声性能优于PCF方法1.5 dB。当C/N0>27 dB-Hz时,本文方法的码跟踪误差比PCF方法和BPSK Like方法都低,并且逐渐接近BJ方法的曲线,显示出了良好的抗热噪声性能。当载噪比为30 dB-Hz时,本文方法的码跟踪误差比BPSK Like和PCF方法分别小了0.005码片和0.01码片,与BJ方法接近重合。总之,本文方法具有较好的抗热噪声性能,特别是在载噪比大于27 dB-Hz时,跟踪性能表现优于PCF方法和BPSK Like方法,具有实际应用意义。
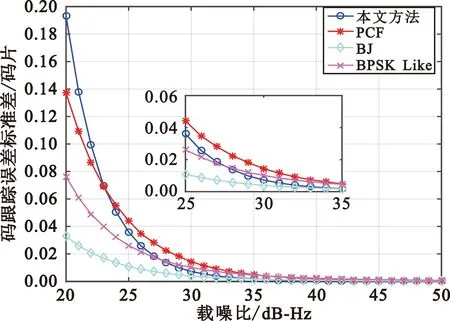
图7 CosBOC(10,5)信号的码跟踪误差
4.2 多径抑制性能
多径效应是全球导航卫星系统测距误差的另一个主要因素[11]。当存在多径效应时,多径和直达信号会引起鉴别输出曲线的过零点偏离、相关函数失真,最终产生跟踪误差。多径误差包络(Multipath Error Envelope,MEE)[15]和运行平均多径误差(Running Average Multipath Error,RAME)是评价码跟踪环路多径性能的主要指标[16]。
为了便于分析多径效应的影响,假设只有一条多径信号的影响,多径信号与直达信号的相位差为0°或180°,并且该多径信号有一定的幅度衰减和相位延迟,从而可以评估最大的多径误差。仿真实验设置前端无限带宽,相关器的间隔dC=0.05码片,同时多径直达比设为-6 dB,CosBOC(10,5)信号的四种跟踪方法的MEE仿真结果如图8所示。分析MEE曲线可以看到,本文方法的MEE明显小于BPSK Like 方法;与PCF方法和BJ方法相比,在大部分区间比较相近。而RAME曲线更能反映各种跟踪方法整体抗多径性能,为了更清晰对比,CosBOC(10,5)信号的四种跟踪方法的RAME仿真结果如图9所示。从图9中可以看出,本文方法的RAME明显优于BPSK Like和PCF方法,表现了较好的多径抑制性能。当多径延迟在0.15~0.7码片之间时,本文方法RAME甚至优于BJ方法。总之,本文方法总体上有着良好的多径抑制性能。
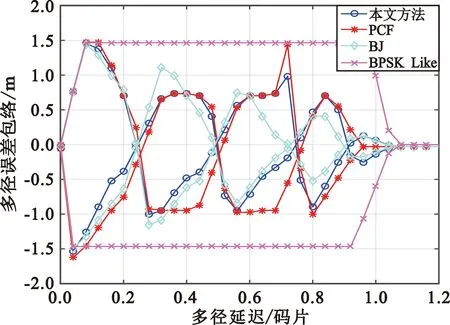
图8 CosBOC(10,5)信号的多径误差包络
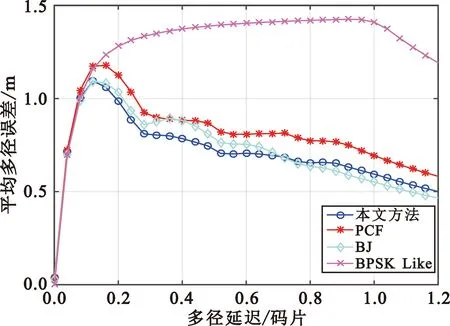
图9 CosBOC(10,5)信号的平均多径误差
5 结束语
本文针对CosBOC信号提出了一种新的无模糊跟踪算法,并分析了其性能。该方法通过构造本地辅助信号以及互相关函数的延迟组合实现单峰无模糊的相关函数。实验结果表明,与BPSK Like、PCF和BJ法对比,本文所提方法的环路结构简单,整体上具有较好的跟踪性能和抗多径干扰性能,具有实用价值。未来的工作可以进一步优化所提方法的组合方式和形状码,以获得更优的性能。
