一种护理床的起背机构运动滑移分析
2022-08-26周浩东李洪洲张轩铭任树娟褚亚旭吕金贺
周浩东,李洪洲,张轩铭,任树娟,褚亚旭,吕金贺
(北华大学机械工程学院,吉林吉林 132021)
0 引言
随着社会的发展和科技的进步,智能护理设备慢慢走进了人们的生活。护理床作为一种普遍的护理产品,从最开始的手摇式钢床到现在的电动式护理床,护理床的功能也日趋全面[1]。随着护理床功能越来越多,患者对使用的舒适性要求越来越高。
在多功能护理床的研制领域,2015年,刘方圆等[2]设计了一款多功能护理床,对屈腿功能进行创新,实现屈腿、抬腿和交叉活动小腿功能的转换。2017年,丁军政等[3]设计了一款多功能电动护理床,集病床、康复、健身为一体。上述护理床一般具有起背、屈膝、床体升降和侧翻身等多种功能[4-6]。其中对于起背功能,由于人体背部会不可避免地与背板产生相对位置变动,使背板拉扯病人背部衣服,使病人呼吸困难。针对上述问题,本文提出一种同旋转中心的起背机构。
1 护理床的扯背现象分析
1.1 起背机构的相对滑移分析
传统护理床在起背时,由于人体的旋转中心与背板的旋转中心不同轴,导致人体背部与背板会产生一个相对位置滑移,使人体背部衣服被拉扯。对于健康的人而言,自己可以通过调节背部姿态来适应背板的位置,但对于不能自理的病人或者老人来说,他们无法调节自身背部姿态,易产生危险。
为分析人体背部与背板相对滑移的实际情况,将人体起背运动简化,具体的人体尺寸参照中国成年人人体尺寸[7-8],建立起背运动模型,如图1所示。在起背的过程中,把人体背部与背板的相对状态看作是平行接触,当背板慢慢抬起时,人体尾椎以上部分随着背板旋转。
图1中O′点和O点分别为人体起背旋转中心和背板旋转中心。在平躺状态下,选取背部与背板接触的一点,点A为接触点。从病人的角度出发,如果要使病人有较好的舒适度,平躺时的接触点A在执行起背动作后成为起背时的点B′,但因为人体起背旋转中心O′和背板旋转中心O不同轴的原因,平躺时的接触点A慢慢形成人体背部点B′和背板上的点B,也就形成了相对滑移,其滑移量为BB′,使病人感受到一种被拉扯的感觉。
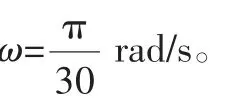
为进行起背过程的力矩分析,将图1进行简化,并建立直角坐标系,如图2所示。两者的旋转中心还是O点和O′点,R1为人体上半身的重心到人体旋转中心O′点的距离,R2为背板重心到背板旋转点O点的距离,a为在x轴方向上O点和O′点之间的距离,b1、b2为旋转过程中背板和背部重心在x轴方向上分别到背板的旋转点之间的距离。
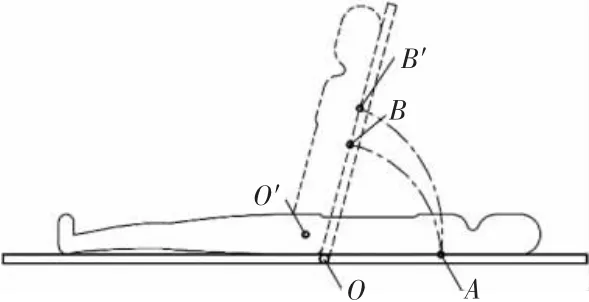
图1 起背运动模型

图2 起背力矩分析图
1.2 起背过程的力矩分析
式中:G1为人体背部的重力;G2为背板的重力;α为背板的旋转角度。
把式(2)、式(3)代入式(1)可得

在起背0°~90°的过程中,会出现两种情况:第一种情况是重心点在x轴上的投影在背板旋转点的右侧;第二种情况是在重心点在x轴上的投影在背板旋转点的左侧。第二种情况下,电动机不再给人体提供额外的力矩[9],因此可以认为T1=0,故有

根据人机工程学中我国人体尺寸的国家标准,初步拟定a=68.5 mm,R1=500 mm。代入式(5),可得t≈13.69 s。考虑到本文的起背板只能起背75°,计算可得旋转75°所需时间t=12.5 s。
综上所述,可得

1.3 起背滑移量分析
为分析扯背过程中的相对滑移量,对传统的起背过程进行了简化,如图3所示。

图3 传统背板滑移量分析图
如图3所示,已知O′点为人体的背部旋转点,b为点O′到床体的垂直距离,即O′D=b。选取A点为人体背部和背板的接触点,取O′A=r2,B′为人体背部起背后A点到达的位置。可得

由式(7)可得

点C为B′点投影到经过O′点的水平线上的交点。直线O′C和直线OA平行,由内错角相等的定理可知∠CO′A=∠O′AO。
取OA=r1,以O为圆心,背板上点A通过旋转α角成为B点,其中BB′即为相对滑移距离,取为BB′=Δs。已知旋转角度为α,可知∠B′O′A=∠B′OA=α。可得

通过式(9)可知:

结合式(10)和式(11),可知点B′的坐标为

根据背板旋转α角,令直线OB′为y=kx+c,其中k=tan α。根据点B′的坐标可知直线OB′的函数式,可得

根据式(12)可得点O的坐标为

结合式(13)和式(14)可得OB的距离,即相对滑移量Δs,计算公式为


根据人体工程学[10]中的中国成年人人体尺寸将肩胛骨选定为人体背部和床体的接触点,初定b=68.5 mm,r2=500 mm,代入Δs的函数式,可得相对滑移量Δs=105.12 mm。
1.4 背板滑移补偿方案
为了消除背板的相对滑移所产生的拉扯感,需要对其进行补偿。该护理床从背板和人体不同位置的原因出发,设计一种使得人体旋转中心和背板旋转中心能够重合的机构,从而消除相对滑移的现象,让病人能够有较好的舒适度。
以人体旋转中心为圆心,建立x、y轴,如图4所示。初步拟定背板初始位姿为水平姿态,随着人体旋转中心旋转,背板从0°逐步旋转至75°。在背板上人体与背板的接触点A点也随着人体旋转中心旋转,即点A在圆弧AB′上移动,也就达到了防止起背过程中接触点分离、产生扯背现象的目的。

图4 滑移矫正方案图
通过上述思路,在背板下添加支撑结构,分析底板EF。在起背过程中,底板EF的位姿随人体旋转中心点O′改变,所以点E和点F都分别在以点O为圆心所对应半径的圆上,也就是点E的运动轨迹(圆弧EE′)和点F的运动轨迹(圆弧FF′)。在此基础上,以圆弧FF′来设计轨道板来辅助背板实现起背功能,图5 为轨道板渲染图。

图5 轨道板渲染图
2 护理床总体结构和动作原理
图6所示为同旋转中心防扯背护理床整体结构,主要由床体、背板、轨道板和电动推杆等部分组成。轨道板设置在床体两侧,用电动推杆铰接背板,电动推杆推动背板,背板沿着轨道板的轨道运动。

图6 同旋转中心防扯背护理床整体结构
3 起背机构仿真分析
3.1 起背机构相对位移仿真分析
用SolidWorks Motion进行运动学仿真分析,马达驱动电动推杆,沿推杆轴线方向,速度设定为10 mm/s,设定人体背部重力为450 N。
根据实际情况,添加了引力,并且设定了轨道板、背板和床体之间的实体接触,最后得出motion 图像,通过Excel 将数据导出,利用MATLAB软件得出相对滑移曲线图像。根据传统背板的相对滑移量公式(15),用MATLAB软件得出传统背板的相对滑移曲线。将2个相对滑移曲线图进行比较,得出人体与背板的相对滑移曲线对比图,如图7所示。

图7 人体与背板的相对滑移曲线对比图
3.2 起背机构的静力学仿真
运用SolidWorks的Simulation对背板进行静力学仿真分析。选择材料为合金钢,弹性模量为210 GPa,泊松比为0.28,屈服强度为620 MPa。取人体背部重力为450 N,进行负载和夹具的设定,在背板上施加一个450 N垂直于板面的力,轨道杆上设定为固定,并在背板推起处设定夹具为固定铰链。对背板进行标准网格划分,得到背板网格划分图,如图8所示。其中节总数为217 680,单元总数为130 074。设定完毕,对其进行分析。最终得出应力分布图(如图9)、应变分布图(如图10)及位移分布图(如图11)。

图8 背板网格划分图

图9 应力分布图

图10 应变分布图

图11 位移分布图
从图8可知,背板的最大应力等于9.093 MPa,小于机构材料的许用应力620 MPa。在外部载荷的作用下,最大位移为1.551×10-4m,对背板的影响比较微小,均满足了材料的强度要求和设计的刚度要求。
4 结论
对于传统护理床起背机构产生的扯背现象,分析了扯背机理,并得到了起背过程中背板和人体接触之间的相对滑移量,最大值为105.12 mm。同时设计开发了一种同旋转中心防扯背护理床,其相对滑移量为0 mm,消除了扯背现象。运用SolidWorks对起背机构进行有限元分析,为结构设计的合理性提供依据。
