基于抗干扰和故障诊断的永磁同步电动机反演控制
2022-08-26孙小康
孙小康, 吴 杰, 乔 茹, 秦 萌
(1.扬州高等职业技术学校, 江苏 扬州 225000; 2.江苏省美术馆技术设备保障部, 江苏 南京 210018)
0 引言
近年来,永磁同步电动机(permanent magnet synchronous motor,PMSM)凭借其体积小、噪声低、响应快、牵引力大等优点,被广泛应用于航空航天、电动汽车和交通运输等众多领域[1-2]。 早期PI 控制器由于其稳定易实现的优势,成为PMSM 常用的转速矢量控制方法。 然而, 永磁同步电动机是一个强耦合、多变量的非线性系统,容易受到负载扰动、建模误差、参数摄动和执行故障的影响。 PI 控制器对于此类非线性系统不具优势, 也无法兼顾系统的快速性和抗干扰能力,难以实现电机的高性能控制[3]。 为了克服上述缺点,获得良好的跟踪精度、鲁棒性和抗干扰性能,国内外相关学者开展了大量研究。 许多先进的非线性控制方法应运而生,自适应控制[4],模糊控制[5],滑模控制[6],反演控制[7]等。文献[7]提出的分数阶滑模控制器不仅解决了非线性系统控制的难题, 并且较好地抑制了负载扰动和参数变化。 但是没有考虑电机驱动系统可能存在突发故障的情况。 而在复杂的永磁同步电动机驱动系统中,经常会出现传感器故障或执行器故障,有时一个微小的故障也可能导致误操作, 破坏永磁同步电动机系统的稳定性。 文献[8]针对电动机驱动系统中可能出现的传感器开路故障问题, 设计了一种基于滑模观测器的故障检测与系统容错方法,但系统的干扰抑制能力较弱,无法克服系统中存在的负载扰动和转矩波动。
为此,本文在[9-10]基础上,以永磁同步电动机速度跟踪控制系统为研究对象, 提出了一种基于干扰和故障诊断观测器的反演控制策略。 首先,建立了永磁同步电动机的d-q 轴数学模型,并充分考虑系统可能出现的多源扰动和执行器故障。 然后,分别设计了对应的干扰观测器和故障诊断观测器。再者,设计基于观测器的反演控制策略,并引入了性能指标,通过求解线性矩阵不等式可以快速得到控制器增益。最后,仿真结果验证了该控制系统能够准确、快速的跟踪给定速度,并具有一定的抗干扰和容错能力。
1 永磁同步电动机模型建立
1.1 d-q 坐标系下数学模型建立
忽略定、转子铁心磁阻,忽略涡流和磁滞等影响。 考虑电路噪声、 模型误差等效的能量有界干扰, 可以得到d-q 旋转坐标系下的表贴式PMSM 数学模型如下[11-12]:
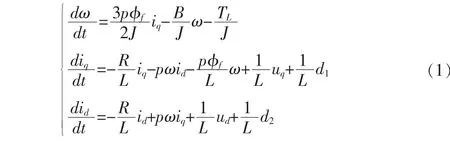
式中:ω—转子机械角速度;p—极对数;ϕf—转子磁链;J—转动惯量;B—摩擦系数;R—定子绕线电阻;L—电感系数;TL—负载转矩,id和iq分别为d-q 轴上电流分量,ud和uq分别为d-q 轴上电压分量,di(i=1,2)为电路噪声或模型误差引起的随机扰动。
1.2 状态空间模型建立
定义:x(t)=[ω iqid]Tu(t)=[uqud]T。 为了便于研究电机转速跟踪控制的问题,根据公式(1)重构含多源扰动和执行故障的永磁同步电动机状态空间模型如下:

2 抗干扰故障诊断控制器设计
2.1 干扰观测器设计
在永磁同步电动机非线性系统控制过程中, 由于电路噪声、模型误差等因素导致存在一定的外部扰动d(t),由下述干扰模型(4)表示:
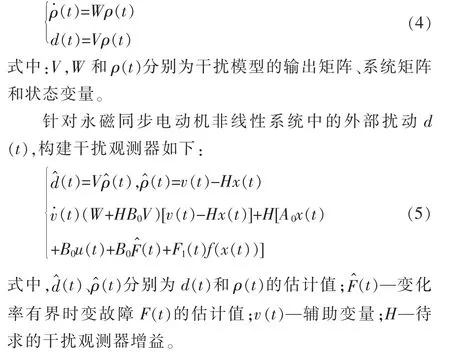
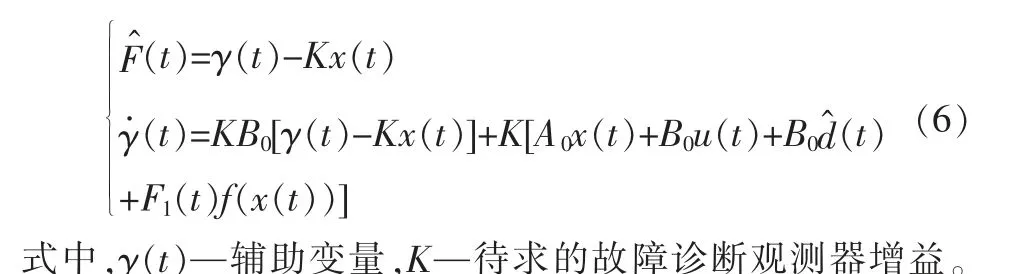
2.2 故障诊断观测器设计
此外, 针对永磁同步电动机非线性系统中可能会出现的有界时变故障F(t),构造如下的故障诊断器,以实现容错控制。
2.3 观测器稳定性分析
定义:eρ(t)=ρ(t)-ρ^(t)为可建模干扰模型(4)的系统估计误差,eF(t)=F(t)-F^(t)为变化率有界的时变故障F(t)的估计误差。 进一步可以得到:式中:z(t)—观测器误差系统(7)的L1性能可控输出,C,D为其状态矩阵。
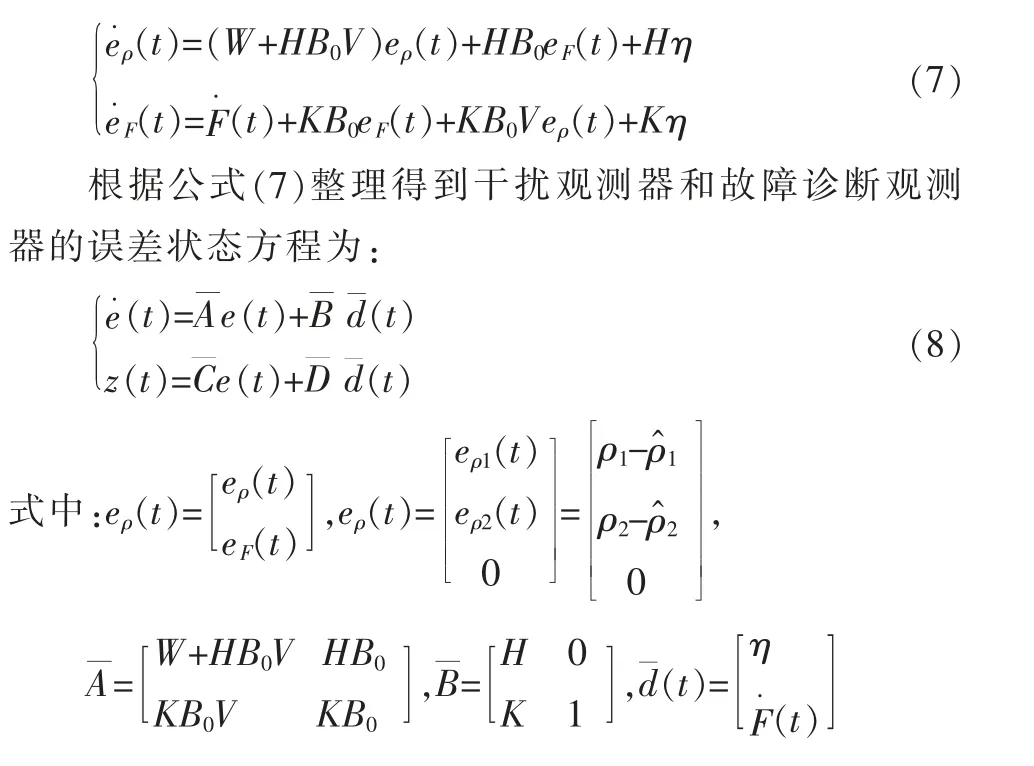
为了验证系统(2)中随机扰动d(t)和故障F(t)可以分别被观测器(5)和(6)准确地观测,需进行以下稳定性分析。
定理1:对于给定参数μ1,γi(i=1,2)和α>0,若存在合适的矩阵Q>0,R,T>0 和常数γ>0满足以下矩阵不等式:


3 复合控制器设计
第二步: 为了进一步实现系统解耦和电机速度的跟踪,选取虚拟输入电流为:

4 仿真结果与分析
4.1 仿真参数
为了验证控制算法的有效性, 分析存在干扰和执行故障的情况下永磁同步电动机的速度跟踪控制性能,本节在Matlab/Simulink 平台上对所设计的复合控制器(基于干扰和故障观测器的反演控制) 进行仿真实验并与传统的反演控制进行速度跟踪性能对比。
仿真中永磁同步电动机系统的物理参数如表1 所示。 选定矩阵不等式相关参数如下:
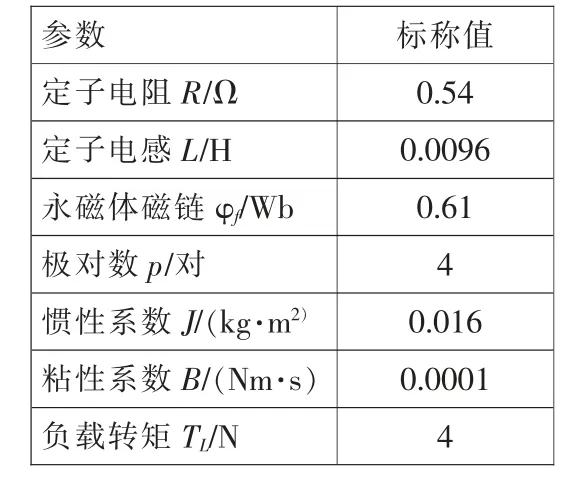
表1 永磁同步电机参数Tab.1 Parameters of the PMSM

4.2 干扰观测和故障诊断仿真分析
假定外部干扰发生在第20s。在设计的干扰观测器作用下, 图1 为永磁同步电动机速度控制系统的正弦干扰和其估计值。 图2 为其对应的干扰估计误差。 显然,由图1 和图2 可知, 本文所提出的干扰观测器可以准确估计并抵消干扰量。

图1 正弦干扰及其估计值
设定系统的阶跃突变故障也发生在第20s,图3 为系统的故障及其估计值,图2 为其相应的估计误差。 由图3和图4 清晰可见,本文所设计的故障诊断观测器具有较好的观测和诊断突变故障的能力。

图2 正弦干扰估计误差
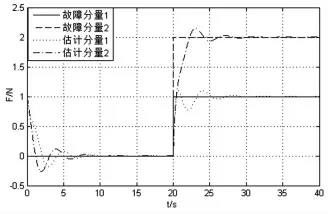
图3 突变故障及其估计值
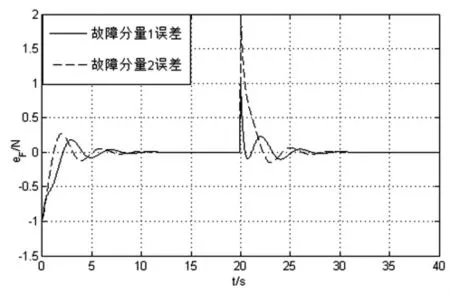
图4 突变故障估计误差
4.3 复合控制仿真分析
本节采用基于抗干扰故障诊断观测器的反演复合控制进行系统的速度跟踪控制仿真研究。相关参数为。图5 为永磁同步电动机实际速度及其目标值。 图6~图7分别为不同时间段的速度跟踪控制局部放大图。本文提出的复合控制器可以很好的抑制干扰和补偿故障的能力,在正弦干扰和突变故障的影响下永磁同步电动机仍能快速准确地跟踪目标值。

图6 复合控制下速度跟踪效果(t=19~25s)

图7 复合控制下速度跟踪效果(t=29.95~30.05s)
5 结论
针对存在外部干扰和突发故障的永磁同步电动机速度跟踪控制系统,本文首先设计了一种基于抗干扰故障诊断观测器的反演复合控制器,通过设计的干扰观测器和故障诊断观测器能够有效的抑制干扰并抵消故障。 然后融合反演控制策略构建复合控制器,使得该非线性速度控制系统能够在较短的时间内准确跟踪到目标值。最后,基于Matlab平台的仿真试验进一步验证了设计控制器的有效性。
