港口移动起重机发动机功率智能分配方法
2022-08-26崔益华李文锋任进勇
崔益华 李文锋 金 建 任进勇 王 建
南通润邦重机有限公司 南通 226013
0 引言
港口移动起重机相较于轨道式起重机具备自重轻、多功能、通过性好和转场方便等优点,这主要得益于起重机自带动力,采用了发动机驱动的设计形式。港口移动起重机的动力系统主要由发动机、分动箱和发电机组成。考虑到各方面的综合因素,往往发动机的实际最大输出功率跟整机最大瞬时使用功率之间是有一定差距的。在某种特殊情况下,发动机会因为无法满足设备瞬时功率请求而快速降低转速并导致电压降低甚至发动机停机。
龙建强[1]探讨了铣刨机发动机功率分配的原则应结合发动机工作的特性曲线,认为功率分配的原则应为保证各系统功率之和与发动机目标值功率相一致,使机器有最好的动力性、经济性和作业生产率。李侃等[2]提出重型平板车液压系统功率分配应综合考虑发动机、泵的最佳工作点与匹配等问题,分析了发动机和液压泵的工作特性,探讨了利用液压系统的反馈控制发动机的转速的思路。王鑫[3]分析了刨煤机功率自动分配的原理,提出了电液控制-过程控制和转速控制2种方式,通过调节行走的机构速度来实现功率的自动分配。他们提出了研究方向及控制思路,但在底层逻辑控制方法的研究方面还不够深入详细。
本文结合新型港口移动起重机车的特性,针对移动起重机的3机构建立功率分配模型。本方法分析了新型港口移动起重机车各机构功率的算法和线性控制方法,实时计算应分配到分机构的功率,再根据此功率折算出应分配的速度和控制信号,最终在输出端通过控制信号的限制避免发动机的瞬时过载。
1 港口移动起重机工作原理
1.1 港口移动起重机工作组成部分介绍
港口移动起重机可分为动力系统、控制系统和执行机构3部分。港口移动起重机由行走机构、转向机构、支腿机构、回转机构、变幅机构、起升机构等组成。在正常工作模式下,只有起升、变幅和回转3个机构动作。该系统发动机采用恒转速控制模式的机型。通过图1、图2可以了解港口移动起重机的外形和内部驱动模型。
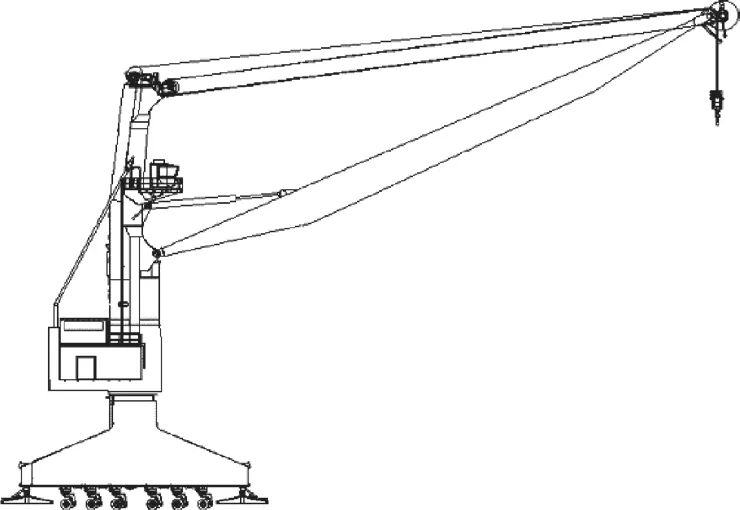
图1 港口移动起重机总图
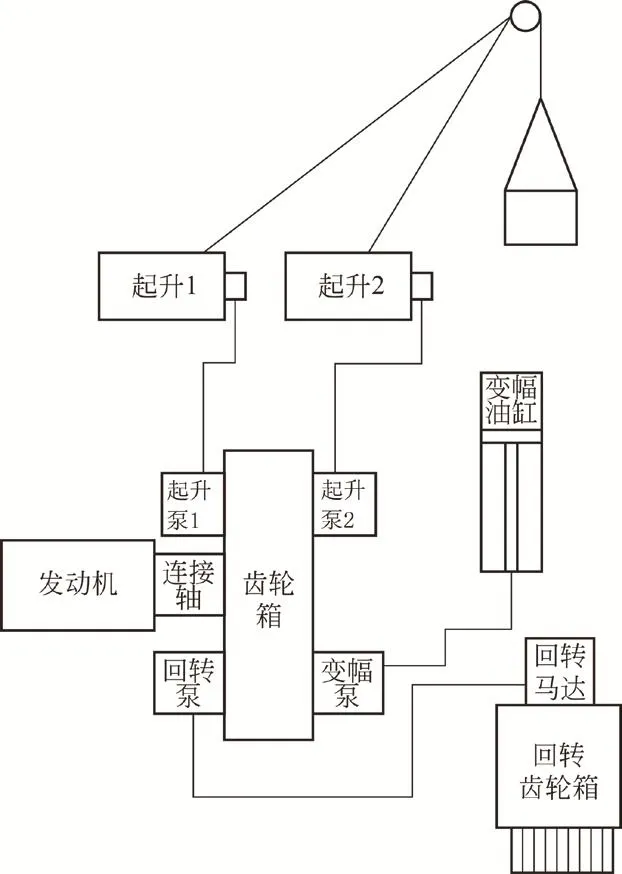
图2 系统起升、变幅、回转机构的模型示意图
1.2 港口移动起重机各机构功率计算
港口移动起重机工作3机构(起升、变幅、回转)一般采用2种驱动方式:液压系统和电气变频。由于电气变频驱动系统功率计算相当简单,可以直接读取变频器的数据,故本文只介绍液压驱动系统。
针对液压系统的特性,液压泵功率为
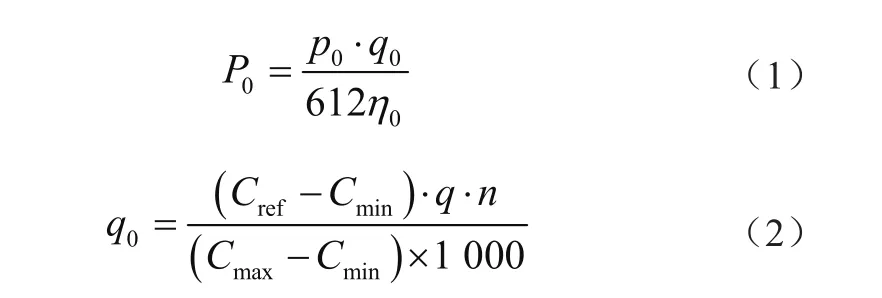
式中:P0为液压泵输出功率;p0为液压泵输出压力可通过压力传感器读取实际数值;q0为液压泵的流量;η0为系统传动效率,一般使用经验系数。
将式(1)和式(2)整理转换得

式中:P为机构功率,Cref为请求控制电流,Cmax为电流最大值,Cmin为电流最小值,q为泵单圈的额定排量,n为泵的转速,p为泵的压力,η为机构的机械系统传动效率。
针对起升、变幅、回转单个机构,已知量为Cmax、Cmin、q、n、p、η,变量为Cref,通过式(3)可分别求出起升、变幅、回转的功率。
2 港口移动起重机发动机智能分配方法
2.1 控制原理
所有的控制计算部分均由控制器(PLC)内的软件部分完成。当操作人员通过操作手柄来请求机构速度,控制器接收到速度请求,控制器根据速度请求计算预期需要的功率,并根据发动机目前的负载情况判断是否能够满足所需要的请求,若能满足则直接输出为改变液压泵组的电流值为请求值。如果判断发动机无法满足请求值,则需要计算最大允许的各机构速度;根据计算限制各机构的电流和速度输出,输出至液压泵组的电流值。在整个过程中实时读取液压泵压力、发动机的扭矩百分比等。控制原理如图3所示。
2.2 控制原理解析
2.2.1 控制步骤
如图2和图3所示,本文介绍的港口移动起重机发动机功率智能分配方法,包含以下步骤:
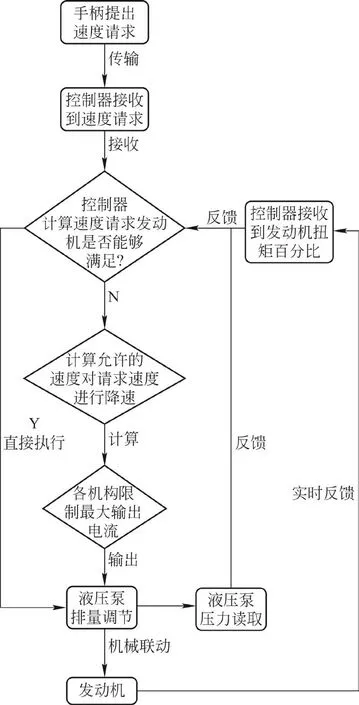
图3 控制原理图
1)读取发动机实时扭矩百分比Tact、怠速扭矩百分比Tidle、起升加减速时间th(预设);
2)读取手柄起升动作请求值Jr、变幅动作请求值Jb、回转动作的请求值Js;
3)根据手柄起升动作请求值计算起升请求速度vh、回转机构液压泵的电流请求值cs和变幅机构液压泵的电流请求值cb;
4)计算起升请求功率Ph,根据回转和变幅的请求电流通过流量与电流的正比关系计算流量q,记录回转的泵头压力p,计算变幅的请求功率Prb和回转的请求功率Prs;
5)通过起升请求功率Prh、变幅的请求功率Prb、回转的请求功率Prs和怠速功率Pidle之和与发动机的总功率Pt计算出与发动机总功率的比值s,若s<1则未超过发动机最大功率,直接给定请求值;若s≥1则已经超过发动机最大功率,计算超出发动机需求的额外功率需求Pex;
6)根据此时起升机构、变幅机构、回转机构的速度比例关系按比例减去相应比例的额外功率需求,单个机构动作时,起升所允许的极限功率为Pmh、变幅所允许的极限功率为Pmb和回转所允许的极限功率为Pms计算出起升机构、变幅机构、回转机构允许最大功率Pmhl、Pmbl、Pmsl;
7)根据允许的最大功率需求计算出起升最大工作速度vmh、回转最大工作电流cms、变幅最大工作电流cmb,并最终给定。
2.2.2 各机构请求输入计算
根据手柄起升动作请求值Jr计算起升机构请求速度和变幅、回转机构液压泵比例阀请求电流。
起升请求速度为
式中:Jmax为手柄最大值,Jr为手柄起升动作请求值,vmax为手柄最大值时对应的最大速度值。

式中:C为电流请求值,Jmax为手柄最大值,Jr为手柄起升动作请求值,Cmax为电流最大值,Cmin为电流最小值;Cmax、Cmin为已知的参数值。
根据式(2)计算回转机构液压泵的电流请求值Cs和变幅机构液压泵的电流请求值Cb。
2.2.3 各机构请求功率计算
起升请求的加速时间为

式中:Jmax为手柄最大值,Jr为手柄起升动作请求值,th为起升从0到最大值加减速时间(系统预设值)。
起升机构的加速度ah为

起升机构负载提升所需要的力为

式中:m为起升机构当前吊重质量(通过称重系统测量取得数值),g为重力加速度。
起升请求功率为
式中:vh为负载的速度,ηh为起升机构的机械系统传动效率。
通过式(7)变形得到式(8)。
式中:P0为液压泵输出功率,p0为液压泵输出压力,q0为液压泵的流量,η0为系统传动效率,Pref为请求功率, Cref为请求控制电流,Cmax为电流最大值,Cmin为电流最小值,q为泵单圈的额定排量,n为泵的转速,p为泵的压力,η为机构的机械系统传动效率。
通过式(8)计算得到变幅的请求功率Prb和回转的请求功率Prs。
2.2.4 各机构请求额外功率计算
港口移动起重机发动机功率智能分配方法,其特征在于:所述步骤5)具体为
通过式(9)计算当前发动机所消耗怠速功率为

式中:Pt为发动机总功率,Tidle为怠速扭矩百分比。
通过起升请求功率Prh、变幅的请求功率Prb、回转的请求功率Prs和当前使用功率之和Pact与发动机的总功率Pt计算出与发动机总功率的比值为
如果比值s小于1则未超过发动机最大功率,直接给定请求值;
如果比值s大于等于1则已经超过发动机最大功率,此时计算超出发动机需求的额外功率需求为

2.2.5 各机构功率智能分配
某一机构当前所使用的功率占最多使用功率的百分比为
式中:Pact为此机构当前所使用功率值,通过读取发动机实时的扭矩百分比计算得出;Pmax为此机构使用功率极限值,为已知给定值。
根据此时3机构的速度比例关系按比例减去相应比例的额外功率需求,单个机构动作时,起升所允许的极限功率为

式中:Prh为单机构所请求功率,Sh为起升占比,Sb为变幅占比,Ss为回转占比,Pex为超出发动机总功率的请求功率。
2.2.6 根据所分配功率计算最终控制信号输出
式中:Cmac为电流最大值,Cmin为电流最小值,q为泵单圈的额定排量,n为泵的转速,p为泵的压力,η为机构的机械系统传动效率,ηh为起升机构的机械系统传动效率,Pmb为变幅所允许的极限功率,Pms为回转所允许的极限功率。变幅和回转的泵控电流值可以直接输出至泵控比例阀。
起升机构如果采用变频驱动即是限制电动机速度输出(根据起升机构的传动比换算出电动机的转速对应变频器相应的控制数值),如果采用液压系统驱动就可以采用与式(20)相同的方式限制液压泵的电流输出,变幅和回转为液压驱动,通过限制电流输出和速度输出限制了功率输出,实现功率智能分配。
3 结论
本文介绍的港口移动起重机发动机功率智能分配方法,通过功率分配技术可以大大降低港口移动起重机的发动机功率选型,同时降低整机质量,降低产品的制造成本和使用成本,提高产品的市场竞争力。在不需要3机构联动的工况下,单个或2个机构可以充分发挥最大运行效率,在需要3机构联动的工况下确保3个机构可以最大比例的发挥效率。该技术应用在印度PICT和VIZAG 2个港口的4台港口移动起重机中取得了很好的使用效果。
