神经触角“单兵千里眼”
2022-08-25郭立安
刘 恒,宋 婷,郭立安
(中国航空工业集团公司雷华电子技术研究所,江苏 无锡 214063)
无人机“蜂群”协同作战(Unmanned Aerial Vehicle Swarm Fighting)是分布式作战思路的典型代表,其最大特征在于体系的区域分布性,分系统具有独立自治性,并且分系统具备全局目标激励的同步性,涉及系统架构、通信网络、指挥控制、辅助决策、同一任务指标下的协同作战等[1]。多无人机协同作战技术集成了单体灵活的优点和系统簇种群优势[2],基于既定的网络化作战模式,发挥了无人机“蜂群”作战的灵活机动性优势,可以在保持单体作战能力的基础上,使系统簇群实现对战场敏感区的侦察,在特殊情况下可对战场上敌军装备实施欺骗干扰以扰乱敌军注意力,并消耗敌方资源,使敌方探测装备的跟踪目标数目趋于饱和,同时增加敌军防空系统的识别难度。
本文主要分析了无人机蜂群协同作战的优势与发展趋势,并结合其作战的特点,提出了一种通过单兵进行远程无线操作的无人机蜂群作战云系统——“单兵千里眼”,通过大量低成本无人机快速灵活的配置,扩大单兵侦察范围,提高单兵作战效能,并仿真分析了典型天线阵列排布方向下的作用距离,为战场环境下单兵无人机蜂群协同作战提供了一定的技术支撑,同时针对“单兵千里眼”作战的关键技术进行了分析。
1 无人机蜂群协同作战优势与发展趋势
1.1 无人机蜂群协同作战优势
1.1.1 分布式侦察-探测-对抗-评估优势
无人机蜂群作战的技术优势包括系统的高度密集性、区域协同性、智能决策性和灵活机动性,其系统在战场上是一种分布式传感器的武器装备,通过不同的部署方式、功能区域的划分、网络化的通信实现多无人机协同作战的功能,发挥无人机集群的优势,使系统达到高于单体装备的作战效能。在侦察方面,无人机蜂群作战[3]利用集群优势实现在单平台分布式部署下的集中侦察与广域侦察,可以在保障侦察效率的情况下实现系统的防御功能;在探测感知方面[4],无人机蜂群单体之间通过辐射不同频段、不同体制的信号实现全频谱、全方位高效率的探测;在电子干扰方面[5],无人机蜂群单体之间通过协同作战完成相互之间的定位功能,通过战场形势确定合适的干扰作战计划,使各单体针对敌方高价值目标实施集中式高效率的电子干扰策略。
1.1.2 动态聚能、灵活配置优势
无人机“蜂群”协同作战技术的主要作战优势是利用单体之间的委任决策原理,将系统簇之间协同作战的快速反应效能发挥至极致。在战场上的分布式单体可消耗分解敌军装备的作战资源,使敌军的整体作战效能断崖式下降,通过干扰分散敌军装备资源的注意力钝化其感知能力,最终从根源上破坏敌军的“侦察—定位—决策—行动”(OODA作战环)[6]。同时,无人机“蜂群”协同作战技术通过系统簇功能的重新配置实现敌方重点关注区域的侦察功能,并实时向作战指挥系统中心反馈侦察效果信息,作战指挥中心通过获取的前方作战信息做出有效的决策控制,对各单体实施分布式的控制,并基于智能体决策与敌军装备进行博弈对抗,使敌军无法获取我军有效战场信息[7]。根据指挥控制中心的资源管理与智能决策系统的合作,各单体之间具有灵活机动、实时功能配置的特点,各单体具备同等地位,在大规模作战环境下,避免了传统战场上一旦单体失效造成不可弥补的损失。
1.1.3 非对称作战成本优势
无人机“蜂群”作战系统通过集中高效费比的单体,通过软件化方式配置其功能、部署其位置,组成多功能复杂系统,并且由于单体的低成本与可替代性,使系统具备非对称作战成本优势。通过系统簇之间的高效协同,实现对敌方高价值目标的资源消耗,利用其低成本大规模优势损耗敌方的装备[8];并且系统簇分布范围广、数量多,使敌方的感知与攻击装备将大量资源消耗在与各单体之间进行攻防对抗上,从而通过提升敌军装备的作战成本来获取我军的成本优势。
1.2 无人机蜂群协同作战发展趋势
1.2.1 异构多类型无人机蜂群协同作战
单体的无人机功能有限,因此即便是多无人机集群也不能对未来复杂多变的战场环境进行灵活多功能的应变,因此未来的无人机集群作战环境必须具备异构多类型的单体,使系统具备多功能的强适应性。异构多类型无人机蜂群未来会根据其作战能力形成以十克级(对标CICADA)、百克级(对标Perdix)、公斤级(对标LoCUST)、十公斤级、百公斤级(对标Gremlins)等系列化平台为基础的作战谱系[9],并且逐渐在雷达感知、预警探测、目标监视、电子侦察、攻防对抗、饱和攻击、主动防御、特种作战等方面发挥重要作用。由于无人机单体朝着多类型异构化的方向发展,无人机集群概念将在“陆、海、空、天、电”五位一体的环境中发挥作用。图1为异构型无人机战场分层配置图。

图1 异构型无人机战场分层配置图
由于异构型多功能无人机所具备的作战使命、作战功能、作战范围、作战效能等各不相同,可将其单体获取的战场信息进行快速融合,获取精确的战场环境信息并进行决策控制。当异构单体中的某一类型无人机数量不够时,可通过整体系统调配实现其他类型无人机的调用并重置其功能以保证任务的完成。针对异构型无人机战场需求,进行不同异构无人机的资源配置、功能配置、分布式部署配置,并根据任务实现相互之间的协同工作,以达到整体性能指标最优。指挥控制中心对战场异构型无人机进行合理的规模配置、位置部署和功能规划,包括后续的相互补充规划,以应对未来复杂战场环境的不确定性,是未来无人机蜂群协同作战的发展方向。
1.2.2 基于人工智能的无人机蜂群协同作战
无人机蜂群协同作战技术主要通过对无人机不同的构建方式、运行模型、动态规划、编队方式、指挥控制等,利用无人机集群作战系统的高效费比、低成本、功能多样、灵活机动、强综合能力等优势,实现广域目标探测、重点战机保护、重点区域突防、远程攻击作战等任务。因此,需要未来战场上的集群无人机具备自主协同的能力。利用人工智能(Artificial Intelligence,AI)技术可在复杂多变的环境下结合精确的战场环境信息进行控制决策,并将指令传输至无人机单平台执行其分配的任务,并且其反应精确且快速,其决策执行效率为人类的几百倍,AI技术为无人蜂群作战系统提供了自主认知和智能决策基础技术支撑。因此,未来空战应整合AI无人机蜂群[10]——可以执行空战的无人机蜂群战斗管理系统,将能够联网处理态势感知、反应判断、战术选择、资源管理和使用等。
1.2.3 无人机蜂群分布式网络化协同作战云
“作战云”的本质是融合,结合异构型无人机完成空、时、地域的传感器探测,利用现有的云计算+边缘计算技术实现战场资源的获取与数据融合,完成战场态势实时共享,为指挥者或智能体提供决策信息支持,在提高单机平台间的协同能力的同时也提升了整体攻防效能。无人机蜂群分布式网络化协同作战云是大数据、云计算、边缘计算等概念在协同作战领域的新应用,是深入发展网络中心战的成果,其核心是陆、海、空、天、电五位一体的作战力量整合,此概念下的作战云是各单机平台组成的传感器、武器系统构建的虚拟“云”,在系统层面上实现战场资源的动态高效管控和海量信息高速、实时、分布式处理与共享,构建跨域、跨军种、分布式、网络化的 “云杀伤”协同作战能力[11]。“作战云”旨在构建虚拟网络化的作战资源共享池,融合了虚拟“云”单元的战场信息。资源共享池具有全域性、分布式、网络化、虚拟化、动态资源分配、接入自管理、高机动性等特点,与传统的多平台协同相比,“作战云”利用云计算、边缘计算技术实现系统级陆、海、空、天、电维度的战场资源整合[12],汇聚成“云”,完成战场数据的网状交互,将对未来的作战体系产生深远影响。但限于空时限制,当前各维度平台之间的信息共享程度有限,空战模式依旧是传统的集中指挥、分散执行的线性模式。基于云协同技术,各域平台可随时入“云”出“云”,提供数据或从云中获取信息,采用即插即用模式并利用自然聚散特性,构建出灵活多样的动态“蜂窝式”力量结构和分布式作战样式。
2 单兵无人机蜂群作战云系统
2.1 单兵无人机蜂群作战云组成与功能
单兵无人机蜂群作战云系统可以通过地面装甲作战车携带至战场前方并释放,主要运用于战场上对敌方敏感区域进行侦听,获取全面的战场信息后进行数据融合,最终将战场态势传递给大型指挥预警机或地面指挥控制中心,经系统决策后对威胁目标进行攻击任务分配,大中型无人机蜂群可承担其攻击任务。
单兵无人机蜂群作战云在战场上的主要功能是通过大量低成本无人机快速灵活的配置扩大单兵侦察范围,提高单兵作战效能,图2为单兵无人机蜂群作战场景图。

图2 单兵无人机蜂群作战场景图
前置的无人机作战云天线阵列主要获取战场信息,呈三角队列,以侵入地方作战区域,尾随的综合信息处理作战云主要对战场信息进行处理,得到的战场态势信息传给指挥控制中心进行综合任务管理与规划。图3为无人机蜂群组网编队图。
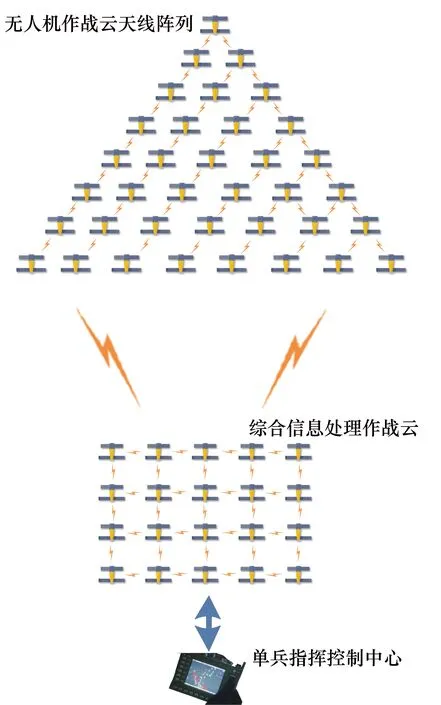
图3 无人机蜂群组网编队图
战场上各个无人机作战云承担不同的功能,可完成侦察、探测、对抗、评估的任务,因此,每个作战云都可作为单兵的神经触角,深入敌方各个隐蔽区域,获取敌方信息。
无人机蜂群作战云为分布式网络化协同作战体系,主要通过协同组网和分布式感知提升作战能力,采用雷达组网和分布部署来提高侦察和预警能力,实现了各作战力量间信息的高度共享及指挥控制链路与通信链路的分离,适应了探测高效化、通信专业化的要求,其即插即用、随时入网、自然聚散的特性显著降低了系统破坏敏感性。组网雷达通过指挥控制中心进行动态资源管理,利用高速通信链路将多部不同体制、不同频段和不同工作模式的雷达信号联合起来,最终通过信号融合处理技术将网内各传感器的信息整合成最全面可靠的情报。
单兵无人机蜂群作战云采用分布式网络化协同作战体系,可凭借广域覆盖实现无缝监视,凭借多角度观察降低甚至消除敌机隐蔽潜入的风险和组网系统的虚警概率;当系统内一部或几部收发天线阵因受到攻击而失效时,其他无人机系统通过编队重构、资源整合,依然能担负起侦察敌方敏感区域的重任,避免预警侦察体系整体瘫痪;分布式网络化系统作战体系既可以灵活调整工作状态,充分发挥每部雷达的探测优势,又可以通过交替开机、轮番机动等方式给敌机造成电磁闪耀干扰,使之混淆跟踪的方向、频率和波形。
2.2 单兵无人机蜂群作战云主要性能指标
2.2.1 无人机蜂群作战云天线阵列方向图分析
通过无人机飞行编队的协同控制,完成对特定区域的侦察。图4和图5分别为10架无人机和36架无人机形成的作战云天线阵列编队结构图,图6和图7分别为两种不同无人机形成的作战云天线阵列的天线方向图。
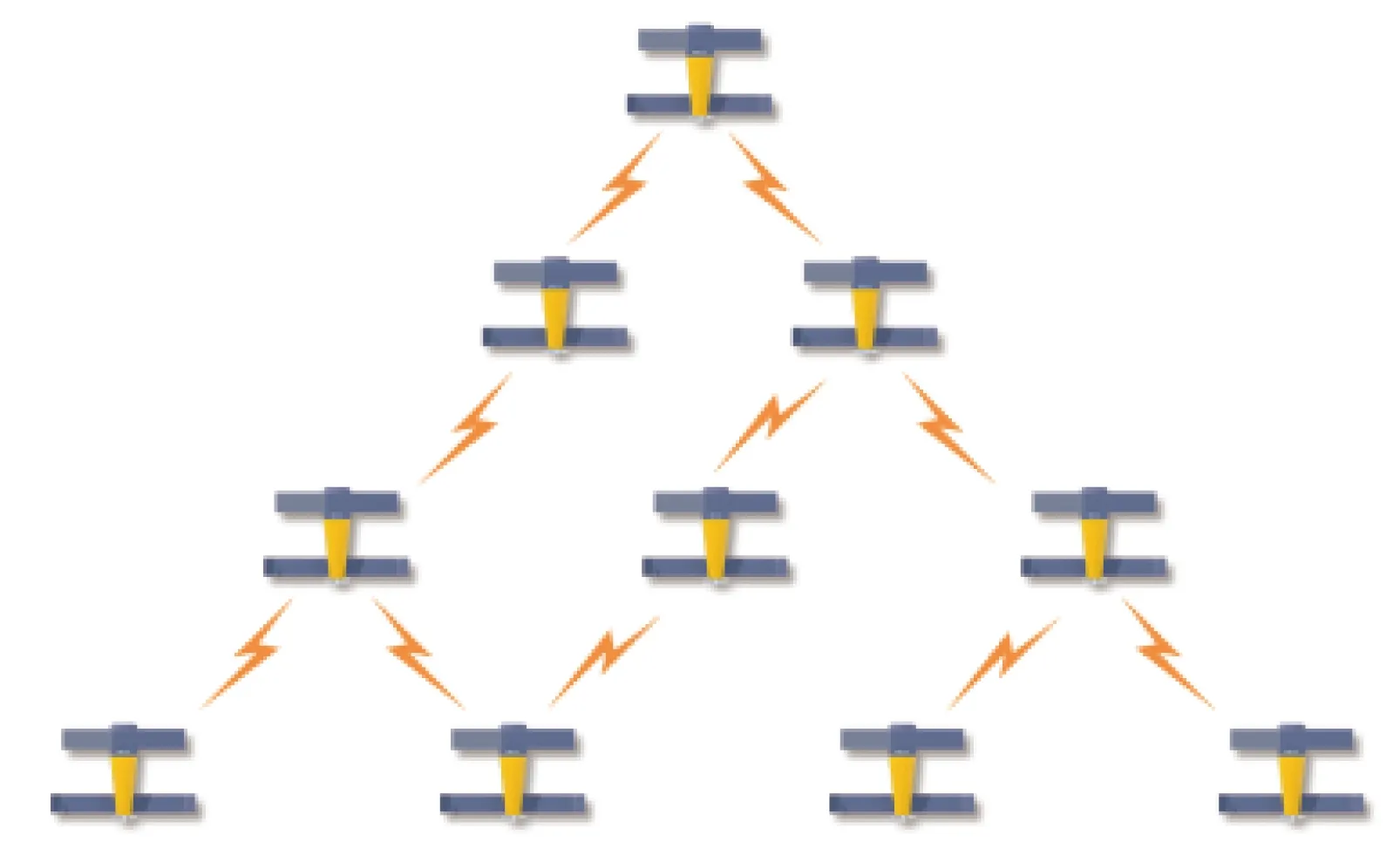
图4 10架无人机作战云天线阵列编队图

图5 36架无人机作战云天线阵列编队图
由图6和图7可知,飞行编队的规模越大,形成的方向图越好,将能量动态聚集,可对战场态势进行很好的评估,并可对无人机飞行编队进行灵活配置以实现波束指向的控制。

图6 10架无人机作战云天线阵列的天线方向图
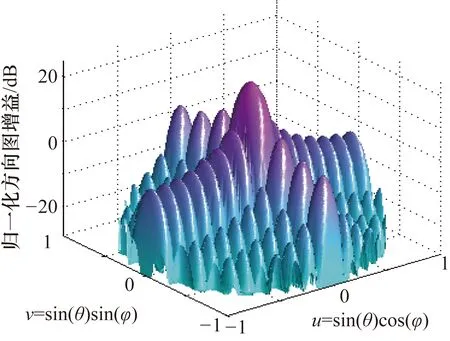
图7 36架无人机作战云天线阵列的天线方向图
2.2.2 无人机蜂群作战云作用距离分析
针对36架无人机作战云天线阵列进行作用距离分析,无人机工作频率为300 MHz,飞行间隔为0.5 m,天线增益为21.25 dB,目标雷达截面积(Radar Cross Section,RCS)为1 m2。
空空探测时,雷达距离方程[13]为
(1)
式中,GT为天线发射增益;GR为天线接收增益;λ为波长;σ为目标的RCS;Ti为相参积累时间;SNR为检测所需信噪比;Pav为天线平均发射功率;k为玻尔兹曼常数;T0为系统噪声温度;Ls为雷达系统损耗;La为大气损耗;Fs为雷达系统等效噪声系数。
根据雷达作用距离方程可得作用距离与天线辐射功率之间的关系图,如图8所示。由图8可知,只需9.8 W的天线辐射功率就能探测到50 km的距离,这将极大提高单兵的作战效能。

图8 空空探测时作用距离与辐射功率之间的关系图
空地探测时,雷达方程[14]为
(2)
式中,k为玻尔兹曼常数;To为发射信号脉宽;H为飞行高度;Vg为在即速度;c为光速;R为作用距离;Br为系统噪声温度;Fn为系统接收通道损耗;Loss为总损耗;λ波长;Lr和La为距离和方位处理中加权引起的信号处理增益损失;awr和awa为距离和方位处理中加权引起的主瓣展宽系数;NEσo为噪声等效系数。
根据雷达作用距离方程可得SAR(Synthetic Aperture Radar,合成孔径雷达)模式下作用距离与天线辐射功率之间的关系图,如图9所示。由图9可知,只需0.07 W的天线辐射功率就能实现50 km的1.5 m分辨率探测距离,这将极大提高单兵的作战效能。

图9 SAR模式作用距离与辐射功率之间的关系图
2.2.3 无人机蜂群作战云空时鲁棒性分析
由于阵列信号处理的时空误差鲁棒性能力有限,因此针对空间与时间鲁棒性进行分析。
(1)阵列信号处理空间鲁棒性分析。
阵列信号处理的空间鲁棒性需要严格保证,前端天线阵元间距至少为半波长的一半,由于工作频率为300 MHz,因此波长为1 m,无人机蜂群间距应至少大于0.5 m。由于现在无人机控制定位技术成熟,采用RTK技术可实现地面控制点几何定位平面中的中高程误差为0.08 m,因此只需保证无人机蜂群间距大于0.6 m,设计的前端无人机天线阵列就不会出现栅瓣,具有良好的天线特性,即可满足阵列信号处理的空间鲁棒性要求。
(2)阵列信号处理时间鲁棒性分析。
本文设计的无人机阵列蜂群的工作频率为300 MHz,考虑前端天线阵列无人机群向后端信号处理阵列无人机群的传输带宽在宽带SAR情况下为最大,由于传输的仅为A/D采样后的基带信号,实现1.5 m的分辨率需要的带宽为100 MHz,采样率为150 MHz,又由于现在常用的雷达相关A/D芯片量化位数一般为12-bit,因此前端天线阵列无人机群向后端信号处理阵列无人机群的传输速率至少为
2(IQ两路基带数据)×150×12=3600Mbit/s=3.52Gbit/s
而业界标杆的5G峰值下载速率在Sub-6GHz频段(低频频段,5G的主用频段)可达4.6 Gbit/s,在毫米波频段(高频频段,5G的扩展频段)可达6.5 Gbit/s,均大于所需的传输速率,因此本文设计的阵列信号处理在时间鲁棒性方面可以满足要求。
综上,本文设计的动平台分布式阵列信号处理在时空误差上具有较好的鲁棒性,但仅限于设计的低频段,在高频段需要实现如此高的探测性能,其对动平台的时空误差鲁棒性要求更高且更敏感,可能会不满足需求。
3 无人机蜂群协同作战关键技术
3.1 无人机蜂群协同作战数据链技术
无人机蜂群作战实现是关键是数据传输的时效性,因此数据链承担着无人机指挥控制和信息传输的重要任务,不同类型无人机平台的数据链类型也各不相同,但都随着通信技术的发展而不断演进,无人机数据链面临着频谱资源短缺、频谱环境复杂、受环境干扰和人为干扰严重等诸多挑战。因此,数据链技术是实现无人机蜂群协同作战的基础,用于连接地面单兵指挥控制中心与无人机编队内各指挥控制节点、作战平台和武器平台,主要传输数字信号,是具有标准化消息格式、组网和通信协议的信息系统[15],该系统能根据需要以不同数据速率及信道传输,作战指挥系统的战术信息无人机蜂群协同作战数据链的关键技术包括统一通信协议和消息标准制定、复杂电磁环境下抗干扰保密通信、多型数据链协同作战、一体化数据链、相对导航定位等[16]。
3.2 无人机蜂群协同作战信息融合技术
信息融合技术是统一战场态势生成的基础,包括对多源信息进行检测、相关、组合和估计等技术,用以提高状态和身份估计的精度,并对战场态势和威胁的重要程度进行适时且完整的评价。无人机蜂群协同作战体系根据自身传感器(雷达、光电、电子对抗和红外等)及编队内其他指挥控制平台提供的空中、陆地和水面航迹消息进行目标信息融合,形成统一的战场态势。无人机蜂群协同作战信息融合的关键技术主要包括时间空间配准、精确导航定位、多机动目标跟踪与识别、航迹关联与维持、态势评估与威胁估计等[17]。
3.3 无人机蜂群协同探测技术
随着无人机协同环境感知、无人机等关键技术的突破,无人机蜂群分布式网络化协同探测系统通过分集增益对目标进行高精度定位,在军事作战领域将会越来越受到重视。协同探测包含无人机蜂群有源/无源协同探测、外辐射源探测、无人机与有人机协同探测、协同任务分配、无人机在线协同航迹规划、无人机协同编队、无人机协同资源管理等。
3.4 无人机蜂群分布式供电技术
现阶段的无人机体积小、质量轻,但由于多数机载电池在单次充电后续航能力一般不足1 h,这使无人机蜂群执行任务的能力受到了极大限制,未来可利用电路板、电源和铜线圈打造独立的无线供电平台。当无人机接近这个平台后,机上的铜线圈就会作为磁场的接收天线,产生交变电流,然后通过无人机上的修正电子将交流转化为直流,从而为无人机供电。
4 结束语
无人机蜂群协同作战云可发挥平台数量优势,在单兵作战方面可充分整合有限的航空资源,本文提出了一种单兵无人机作战云系统,在此基础上构建起新型空中作战力量,通过快速敏捷的飞行编队控制无人机天线作战云阵列,完成战场态势实时共享和决策支持,提升作战云平台间的协同防御能力与单兵侦察效能,可在未来战场上形成一种新的颠覆性作战体系。
今后应根据作战需求,深入研究单兵无人机作战云阵列排布与实时路径规划,利用有限的航空资源最大化实现探测效率,发挥单兵千里眼优势。
