基于Robot Studio6.08的ABB机器人码垛排序工作站设计
2022-08-23襄阳职业技术学院公相
襄阳职业技术学院 公相
通过Robot Studio6.08环境中搭建虚拟码垛排序工作站,先分析 ABB 工业机器人离线编程环境中的 Smart 组件设计和信号连接;在重点分析程序算法。最后介绍,利用华航唯实CHL-JC-01实训工作站,成功实现物料码垛排序任务过程。
1 虚拟工作场景建立
本研究以ABB机器人为对象,在Robot Studio6.08中创建虚拟工作站,对码垛与排序机器人的工作过程进行了仿真模拟,为实际机器人配置、编程、调试提供了技术参考。第一步,按CHL-JC-01工作站实际尺寸建模构建码垛机器人工作场景;第二步,进行Smart组件设计和I/O信号连接,并创建机器人I/O信号板卡并与外围设备控制信号配置关联;第三步,规划路径点、编写机器人程序实现码垛与排序工作过程仿真和分析。虚拟工作站如图1所示。并按照如图2所示要求将物料整齐、按序地在工作台上排列,并且间距可以任意调节。
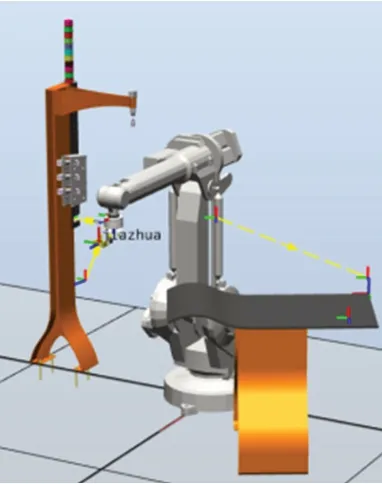
图1 虚拟工作场景布局 Fig.1 Virtual work scene layout
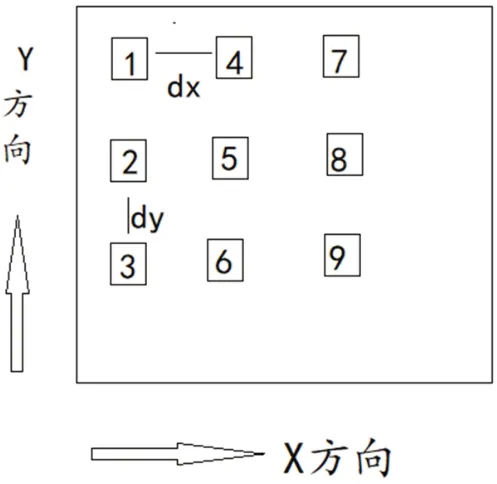
图2 物料排列Fig.2 Material arrangement
2 Smart组件设计和/O信号连接
在Robot Studio软件中创建离线仿真工作站,动态效果对整个工作站的仿真起到一个关键的作用。Smart组件功能就是在Robot Studio软件中实现动态效果的高效工具,适用于比较复杂,需要进行逻辑控制的动作仿真。Smart组件功能需要进行系统的学习。本文通过实现物块下落、拾取、放置的动态效果来介绍一下Smart组件的强大功能。Smart组件流水线搬运码垛动态效果包括:机器人使用工具的安装和拆除,夹爪拾取/放置料库上的物料块,物料块沿料井下落,夹爪拾取/放置物料。
Smart组件功能按钮在“建模”功能选项卡中,单击后打开Smart组件编辑器,在软件界面左侧“建模”浏览器中生成默认名称为“SmarComponent 1”的组件,右击“SmartComoponent 1”可以对组件进行重命名。在Smart组件编辑器中可以创建、编辑和组合Smart组件,用来完成要求的动作仿真。
通过添加物块下落Smart组件,具体情况如图3所示,和其I/O信号连接,具体情况如表1所示。实现了工作站系统“物料”输送的动态效果,以wukuai_INPos虚拟输出信号,代表物块在料仓输送到位。通过添加物块与放置Smart组件,具体情况如图4所示,和其I/O信号连接,具体情况如表2所示。以GripOk虚拟输出信号,代表物块拾取到位,实现了工作站系统“物料”拾取放置的动态效果。
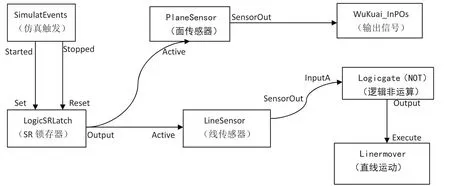
图3 物块下落Smart组件Fig.3 Block falling Smart component
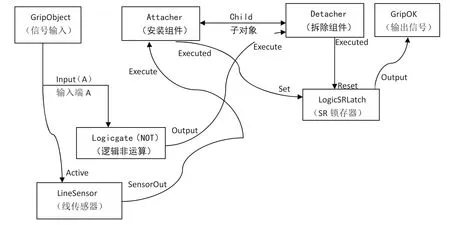
图4 物块拾取与放置 Smart 组Fig.4 Blocks and placement Smart groups
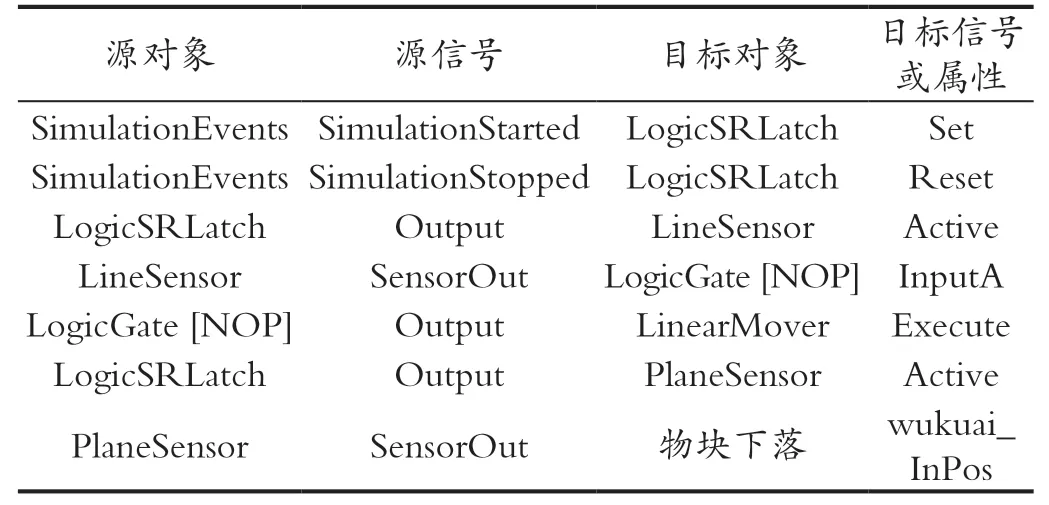
表1 物块下落Smart组件I/O连接Tab.1 Block drop Smart component I/O connection
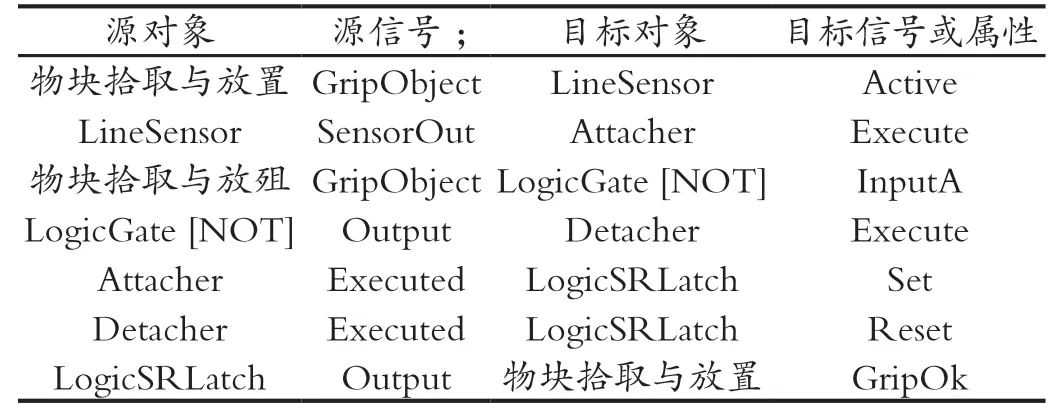
表 2 物块拾取与放置 Smart组件I/O连接Tab.2 Block pick and place smart component I/O connections
夹爪的动态效果是把夹爪工具设计成机械装置,有两个机械状态:张开和闭合,如图5所示。并用事件管理器来实现夹爪的动态效果,如表3所示。在用事件管理器创建夹爪动作之前,需要先配置机器人的IO板,并创建机器人的输出信号,因为在Robor Studio软件中,如果需要模拟夹爪夹取不同的物料,夹取每种物料时,夹爪闭合的程度不一样,故这里设置三种输出信号以方便后续的对应。具体步骤如下:(1)调出事件管理器,单击“添加”按钮,系统弹出“创建新事件”对话框,“设定启用”设置为 “开”,“事件触发类型”设置为“T0 信号已更改”,然后单击“下一个”按钮。(2)在下一个界面中,“信号名称”选择“D01”,“触发器条件”选择“信号是True”,然后单击“下一个”按钮。(3)在下一界面中,“动作类型”设置为“将机械装置移至姿态”,单击“下一个”按钮,在下一个界面中“机械装置”选择为“夹爪”,“姿态”为“张开”,然后单击“完成”按钮。(4)设置完成后,会显示设置的行为动作。(5)按照上述生骤,完成“闭合”的姿态设置。
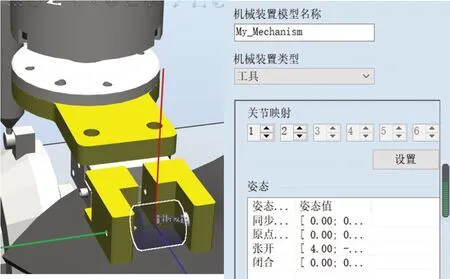
图5 夹爪的机械装置模型Fig.5 Mechanical model of the gripper
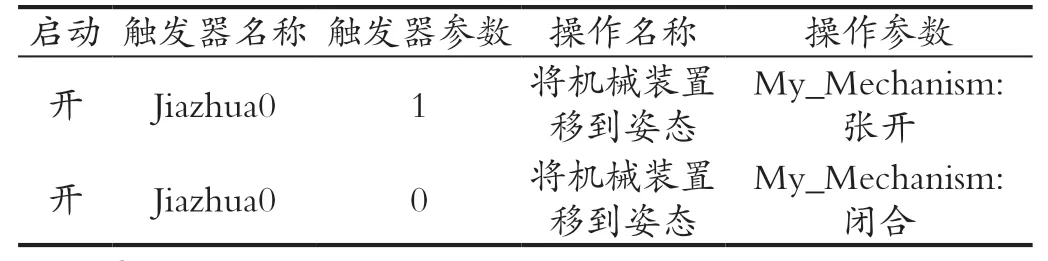
表3 夹爪装置动态效果的事件管理器Tab.3 Event manager for the dynamic effect of the gripper device
3 程序分析
3.1 坐标计算程序
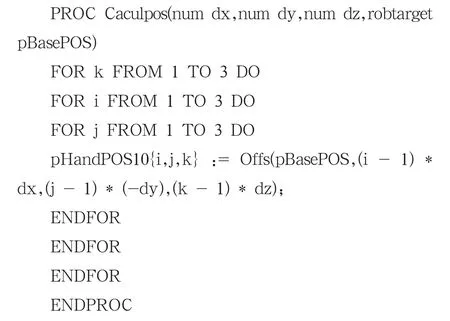
其中,pHandPOS10{i,j,k} 是一个三维,共i*j*k个元素的数组可变量。利用For循环把每个物块的位置计算出来。要注意的是要以面对工作台左下角来建立工件坐标系,保证是右手系。那么偏移函数的计算才是正确的。
3.2 位置输出程序
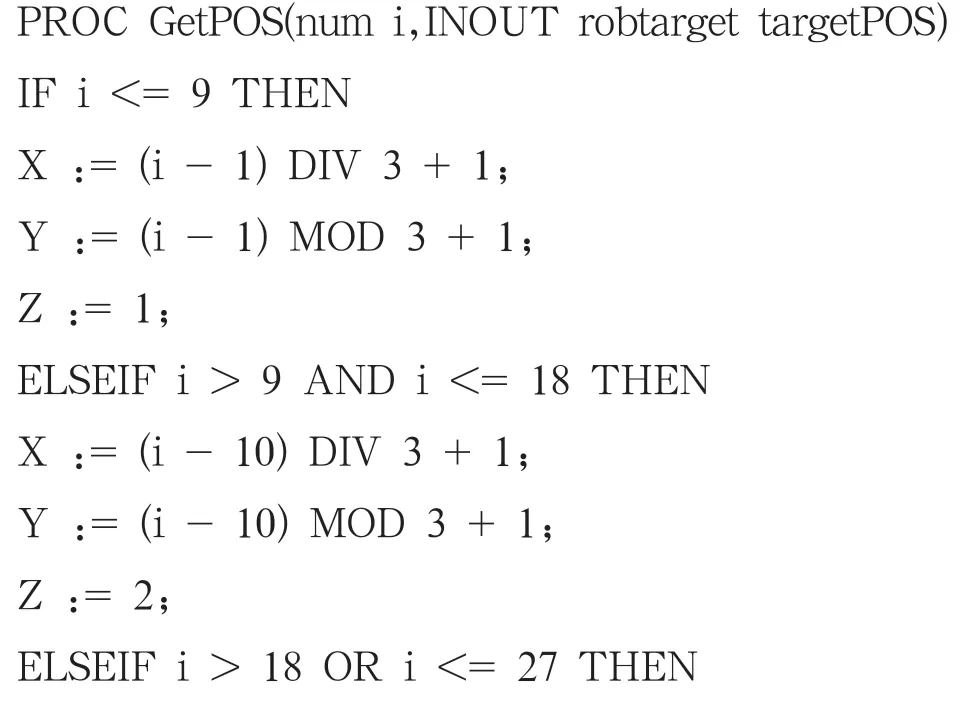
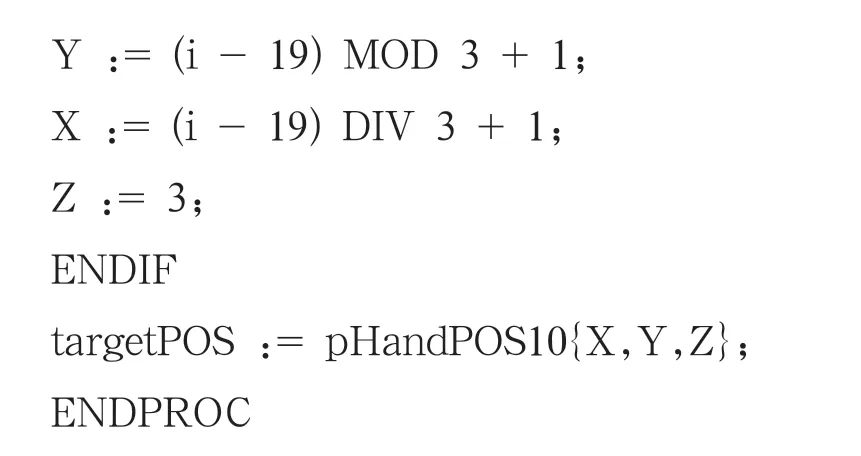
其中,利用了if...ELSEIF语句,来判断在不同物块编号i时,X,Y,Z(列、行、层)号的数值。最后把每个物块位置赋值给参数targetPOS。
这两程序是此工作站的核心程序,也是算法程序。
3.3 主程序
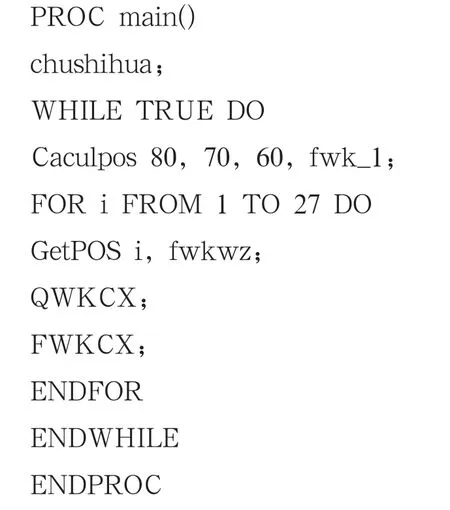
在主程序调用Caculpos程序时,dx、dy、dz值可以任意设置, fwk_1为示教的1号物块位置。在主程序调用Getpos程序时,i为物块编号,FWKWZ为物块放置点位,是个变量。其他程序如取物块程序QWKCX、放物块程序FWKCX,放初始化程序Chushihua等按标准编写即可。
4 利用CHL-JC-01工作站实际操作
利用Robot Studio软件将程序导出为MOD格式,拷贝到示教器中。在实际操作中,要注意开始要建立工具坐标系和工件坐标系,并按图示教1号物块放置位即可。对于程序中的虚拟信号可以删除。
5 结论
本文以码垛排序工作站系统研究对象,运用虚拟仿真技术,在Robot Studio环境下完成机器人系统的配置、调试、编程和仿真,生成的机器人离线程序经过坐标变换后可以同步到生产线机器人中进行实际运行。
这种设计方法不仅为设计者提供了更加灵活的评估环境,同时有助于缩短工作站的研发周期,提高可靠性,对指导实际生产具有重要意义。
