基于三步离散法的DC-DC变换器模型预测控制研究
2022-08-22张胜涛李兆伟毛永强
陈 荣,张胜涛,李兆伟,毛永强
(1. 中国石油大学(华东)新能源学院,山东 青岛 266580;2. 国网临沂供电公司,山东 临沂 276000)
1 引言
除传统Buck变换器和Boost变换器外,双管Buck-Boost变换器可工作在Buck模式和Boost模式下,能实现升降压功能,对应较宽的输入范围,并且具有开关管电压应力低、输入输出电压极性相同的优势,在电池充放电等领域应用广泛。新能源发电、燃料电池供电系统等领域的不断发展,对DC-DC变换器的性能指标提出了更高的要求,其控制策略研究对提高变换器的稳定性和动态响应特性具有重要意义[1]。
随着数字实时控制芯片计算能力的提高,计算密集型的模型预测控制逐渐成为了研究热点[2]。当前适用于DC-DC变换器的连续控制集模型预测控制方法精度的提高可分为两个方向:一是采样频率不变,采用相对复杂的成本函数,利用特定方法消除系统动态模型重建的等式或不等式约束,将最优控制问题过渡到其它数学问题[3-6];二是增大采样频率,采用常规成本函数。前者虽然降低了对采样频率的要求,但在消除模型约束时通常会带来二次规划(Quadratic Programming,QP)问题,QP问题的解决需要系数矩阵重复相乘,计算量巨大,求解非常耗时[7-9]。后者虽然方法直观,但采样频率的增大不仅造成计算量的提升,更是对当前硬件设备性能提出了更高的要求。文献[10]将v步离散法应用于混合模型,具有良好的闭环性能,但以此派生的控制器相当复杂,伴随诸多限制。
为了解决上述问题,本文提出一种基于三步离散法的模型预测控制方法,将其应用于连续导通状态下Buck变换器,并延伸至Boost变换器和双管Buck-Boost变换器。该控制方法在不增大采样频率的情况下,将占空比区间细化为3个子区间,不增加过多计算量,使变换器间接达到更高采样频率的精度,减小误差,在保证精度的同时,具有良好的稳态性能和动态响应特性。
2 Buck变换器
图1为Buck变换器拓扑,其中Q为可控开关管,D为二极管,L、RL为电感和电感内阻,C为输出电容,Vin、Vo分别为输入电压和输出电压,iL、io分别为电感电流和输出电流。
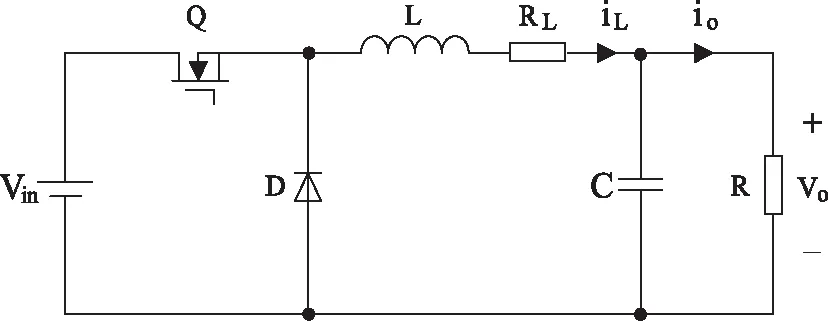
图1 Buck变换器拓扑
2.1 预测模型
通过对连续时间模型进行前向欧拉离散化,得到Buck变换器的状态空间表达式

(1)
其中
式中Ts为开关周期,D(k)为可控开关管Q在第k个开关周期内的占空比。
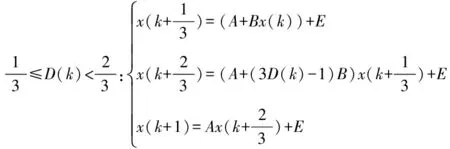
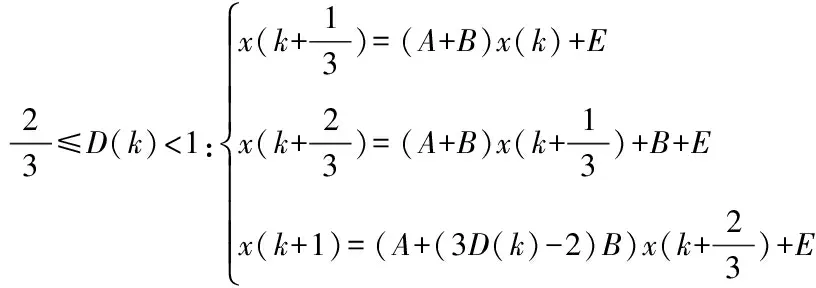
2.2 基于三步离散法的预测模型
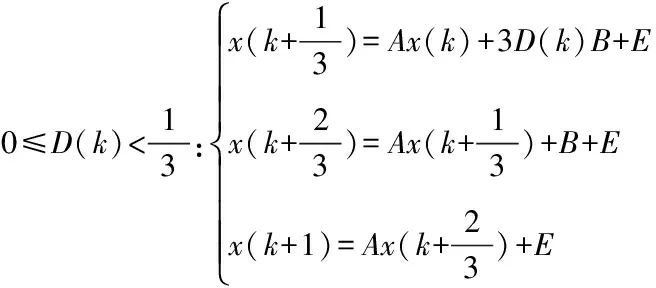
(2)

(3)
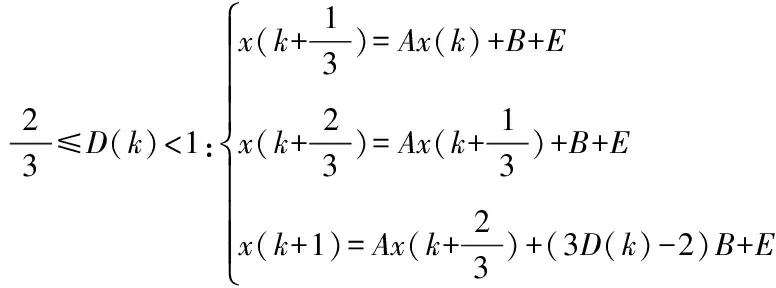
(4)
式中开关周期Ts相应变为子周期τ。
Buck变换器模型预测控制采用的成本函数为
J=(Vo(k+1)-Vo,ref)2
(5)
式中Vo,ref为输出电压期望值。
占空比太小时,Buck变换器转换效率低,且易出现因开通时间太短而导致MOSFET不能完全导通的情况,因此本文未给出占空比在0至1/3区间内Buck变换器最优控制率的推导结果。将式(3)式(4)代入式(5)中推导得出Buck变换器下一时刻预测控制的占空比为

(6)

(7)
2.3 仿真分析
运用Matlab/Simulink对Buck变换器预测控制进行建模与仿真,变换器模型主要参数为:电感L=440μF;电感内阻RL=0.1Ω;输出电容C=220μH;输出电压期望值Vo,ref=36V;开关频率f=50kHz。仿真波形如图2所示。
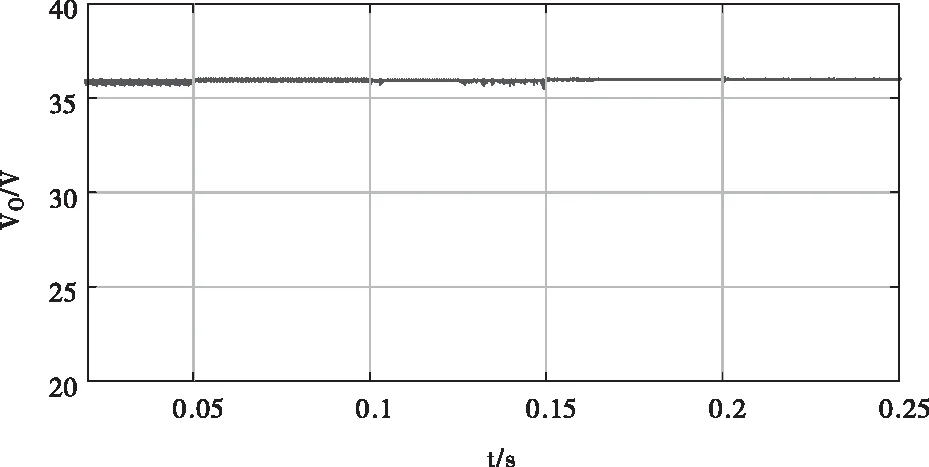
图2 Buck变换器仿真波形
0.05s时Vin由40V突变至53V,0.1s时Vin由53V突变至55V,0.15s时Vin由55V突变至70V,0.2s时负载由1A突变至2A。从仿真结果可见,Buck变换器的稳态平均输出电压非常接近输出电压期望值,最大纹波为0.06V,实现了Buck变换器降压的功能,并且在扰动情况下变换器最大调整时间为0.6ms,动态响应快,超调小,具有良好的动态特性。
3 Boost变换器
图3为Boost变换器拓扑,其中Q为可控开关管,D为二极管,L、RL为电感和电感内阻,C为输出电容,Vin、Vo分别为输入电压和输出电压,iL、io分别为电感电流和输出电流。
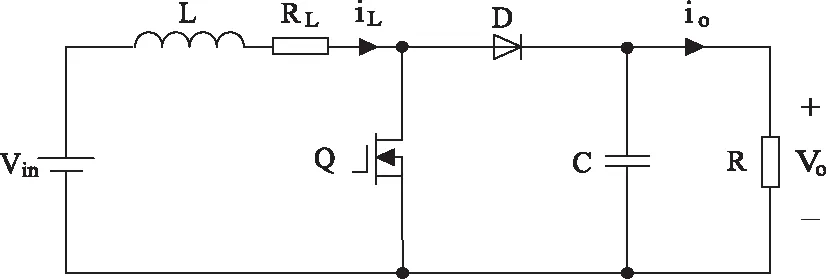
图3 Boost变换器拓扑
3.1 预测模型
通过对连续时间模型进行前向欧拉离散化,得到Boost变换器的状态空间表达式:

(8)
其中
式中Ts为开关周期,D(k)为可控开关管Q在第k个开关周期内的占空比。
3.2 基于三步离散法的预测模型
基于三步离散法的精确预测模型为:

(9)
(10)
(11)
式中开关周期Ts相应变为子周期τ。
Boost变换器模型预测控制采用的成本函数为
J=P(Vo(k+1)-Vo,ref)2+Q(iL(k+1)-iL,ref)2
(12)
式中Vo,ref为输出电压期望值,iL,ref为稳态下电感电流期望值。
根据功率平衡可以计算得出稳态下的电感电流期望值为

(13)
占空比太大时,Boost变换器易出现电感在开关管导通期间储存的能量无法全部释放的问题,将造成电感饱和,直至烧毁,因此本文未给出占空比在2/3至1区间内Boost变换器最优控制率的推导结果。将式(9)、式(10)和式(13)代入式(12),可推导得出Boost变换器下一时刻占空比的预测值。
3.3 仿真分析
运用Matlab/Simulink对Boost变换器预测控制进行建模与仿真,变换器模型主要参数与Buck变换器相同,仿真波形如图4所示。

图4 Boost变换器仿真波形
0.05s时Vin由19V突变至23V,0.1s时Vin由23V突变至25V,0.15s时Vin由25V突变至32V,0.2s时负载由1A突变至2A。从仿真结果可见,Boost变换器的稳态平均输出电压非常接近输出电压期望值,最大纹波为0.02V,实现了Boost变换器升压的功能,并且在扰动情况下变换器最大调整时间为3ms,动态响应快,超调小,具有良好的动态特性。


(14)
4 双管Buck-Boost变换器
4.1 基于三步离散法的两模式工作状态
图5为双管Buck-Boost变换器拓扑,其中Q1、Q2为可控开关管,D1、D2为二极管,L、RL为电感和电感内阻,C为输出电容,Vin、Vo分别为输入电压和输出电压,iL、io分别为电感电流和输出电流。
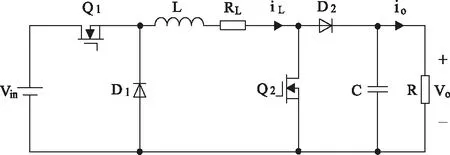
图5 双管Buck-Boost变换器拓扑
当输出电压低于输入电压时,由开关管Q1调节输出电压,该条件下Q2一直处于关断状态,此时变换器工作在Buck模式;当输出电压高于输入电压时,由开关管Q2调节输出电压,该条件下Q1一直处于导通状态,此时变换器工作在Boost模式

(15)
针对双管Buck-Boost变换器Buck工作模式和Boost工作模式与仅具降压或升压功能的Buck变换器和Boost变换器等效的特点,本文将基于三步离散法的Buck变换器和Boost变换器模型预测控制方法应用于双管Buck-Boost变换器,运用Matlab/Simulink进行建模与仿真,仿真波形如图6、图7所示。
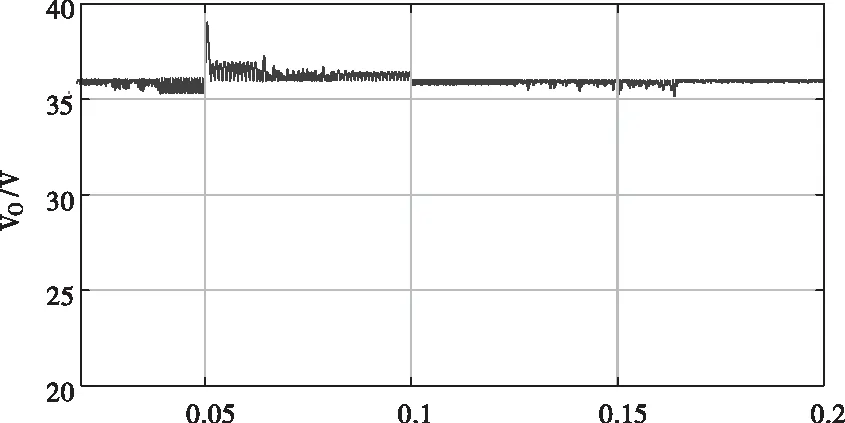
图6 双管Buck-Boost变换器Buck模式
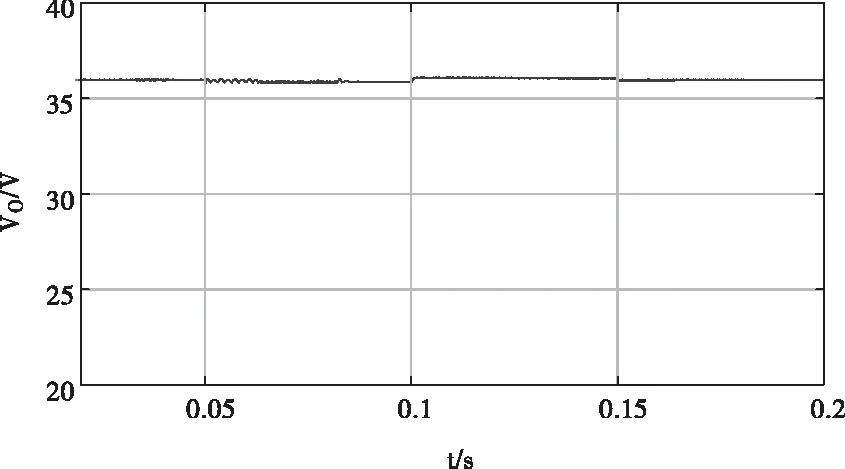
图7 双管Buck-Boost变换器Boost模式
Buck模式0.05s时Vin由40V突变至53V,0.1s时Vin由53V突变至56V,0.15s时负载由1A突变至2A。Boost模式0.05s时Vin由19V突变至23V,0.1s时Vin由23V突变至25V,0.15s时Vin由25V突变至32V,0.2s时负载由1A突变至2A。由仿真结果可知,Buck模式稳态平均输出电压误差增大,最大纹波为0.155V,扰动时最大调整时间为14ms,超调明显。Boost模式稳态平均输出电压精度变化不大,最大纹波为0.055V,扰动时最大调整时间为6ms。
相较于Buck变换器和Boost变换器,三步离散法应用于双管Buck-Boost变换器模型预测控制时,输出电压波动变大且对输入电压和负载扰动的调节时间变长。上述问题是由双管Buck-Boost变换器的两工作模式,即Buck模式和Boost模式在对应工作模式下,输入电压和负载变化引起占空比区间变化,占空比的波动导致占空比区间选择不够精确引起的,而双管Buck-Boost变换器中可控开关管和二极管较多,器件导通压降和内阻导致预测模型的准确度受到影响,使得占空比区间选择不精确问题凸显出来。
4.2 改进占空比区间选择环节
针对上述问题,本文对占空比计算区间选择方法进行改进。由理想条件下Buck变换器和Boost变换器的输入输出电压变化规律,推导期望输出电压下输入电压所对应占空比区间的确定方法,受限于较多的可控开关和二极管数量,易引起占空比区间变化。基于上述分析,在不改变预测模型的情况下,在实际投入由最优控制律利获得的占空比结果之前,增设(iL(k+1)-iL,ref)2计算环节,由此环节的计算结果选择占空比区间,应用改进方法的仿真结果如图8、图9、图10所示。
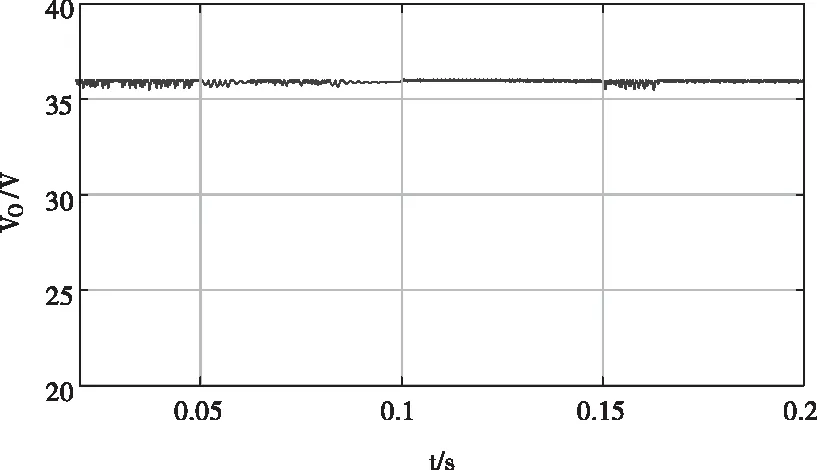
图8 改进双管Buck-Boost变换器Buck模式
图9 改进双管Buck-Boost变换器Boost模式
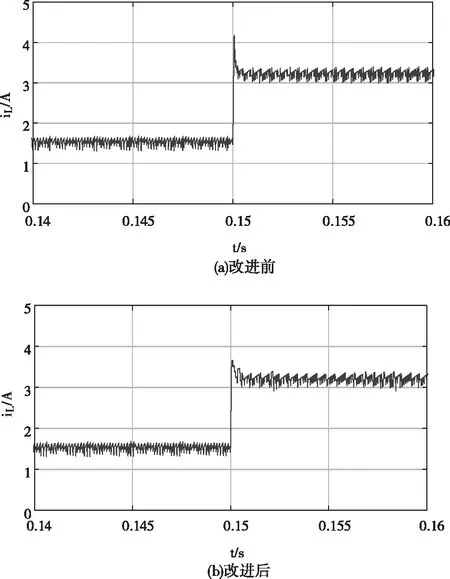
图10 双管Buck-Boost变换器Boost模式负载突变时电感电流
由图8可以看出,改进后Buck模式下的输出精度更高,最大纹波减小为0.11V,扰动时最大调整时间降为7.5ms,且消减了突变引起的超调,稳态性能和动态性能均得到提升;由图9可知,改进后Boost模式下的输出精度有所提高,最大纹波减小为0.01V,扰动时最大调整时间降为0.6ms;由图10可知负载突变时电感电流超调减小,改善了稳态性能和动态性能。
应用改进占空比区间选择方法后,双管Buck-Boost变换器的仿真波形如图11所示,0.05s时Vin由23V突变至26V,0.1s时Vin由26V突变至33V,0.15s时Vin由33V突变至53V,0.2s时Vin由53V突变至56V,0.25s时负载由1A突变至2A,变换器输出电压一直保持在36V左右。
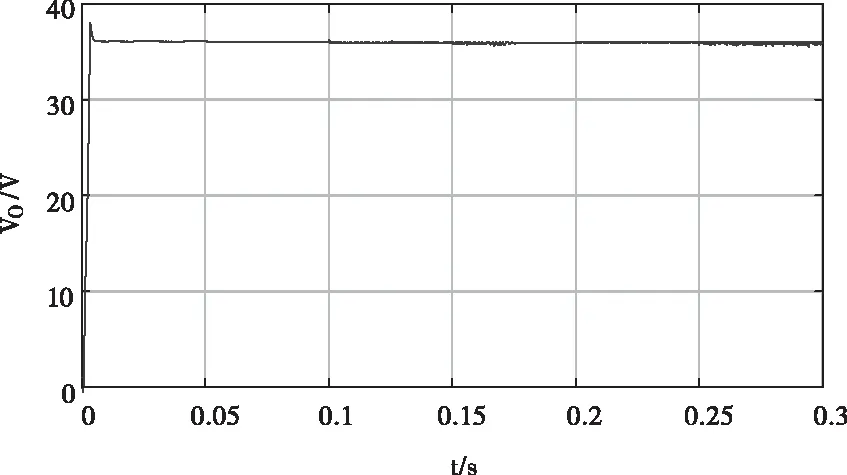
图11 改进双管Buck-Boost变换器
由于占空比计算区间的选择是利用(iL(k+1)-iL,ref)2计算得出,Buck模式相较之前计算量有所增加,但改进前精度的下降并不是因为Buck模式所采用的成本函数精度不够,而是因为Buck模式下的占空比计算区间选择不够精确,因而(iL(k+1)-iL,ref)2投入到区间选择环节比仅仅加入到成本函数中效果更好,改进后提升更明显。而Boost模式成本函数本身含有(iL(k+1)-iL,ref)2,增设环节只是将成本函数中该项的计算结果提出用于进行占空比计算区间选择,因此Boost模式下计算量没有增加,使得双管Buck-Boost变换器在整体性能改善的同时不会增加过多计算量。
5 结束语
本文采用三步离散法改进传统连续控制集模型预测控制,并将寄生电阻加入到预测模型当中,不再需要PI控制复杂的控制参数试凑过程,在多变量优化控制方面有很大的便利性,确保了Buck变换器和Boost变换器具有较高的稳态精度以及良好的动态响应特性。
考虑到两工作模式的特点,将Buck变换器和Boost变换器预测控制方法引入双管Buck-Boost变换器。相较于Buck变换器和Boost变换器,双管Buck-Boost变换器应用基于三步离散法模型预测控制方法后,精度降低和动态响应特性变差的问题,文中分析了原因,并设计了占空比区间选择环节。仿真结果表明三步离散法结合占空比区间选择改进环节能够获得更优秀的控制性能。
本文所提方法可应用于其它类型非隔离DC-DC变换器,寄生电阻的考量使得仿真更接近于实际,有利于研究成果向实际应用的转化。
