飞机防滑刹车系统模糊滑模控制研究
2022-08-22杨建忠王浩天陈希远
杨建忠,王浩天,陈希远
(中国民航大学适航学院,天津 东丽 300300)
1 引言
飞机防滑刹车系统是现代飞机的重要组成部分,它在起飞、降落、滑行中对保证飞机安全起到至关重要的作用[1],随着航空事业的发展,飞机正朝着大吨位、高速度的方向发展,对防滑刹车控制系统的性能提出了更高的要求[2]。而飞机防滑刹车系统由于构成系统的部件复杂和运行环境变化使得飞机防滑刹车系统成为一个具有不确定性与时变参数的复杂非线性伺服控制系统[3],例如存在跑道工况的不确定,空气阻力变化的不确定性等,要对其进行高性能的控制是较为困难的。由于对防滑刹车系统的不确定性进行精确建模存在困难,现有的研究在进行建模时多是对其进行近似线性化处理或经验模型处理,容易造成设计的控制律在复杂的刹车环境中鲁棒性较差而导致刹车性能的下降。为了避免系统结构的不确定性和外界随机扰动对系统的影响造成控制系统性能下降。现有的研究中,文献[4]研究近空间飞行器的姿态控制、文献[5]研究四旋翼飞行器的的控制问题、文献[6]研究机械臂的控制问题,上述系统都是存在参数不确定,外界干扰及未建模动态等不确定性的非线性系统,在建模时均给系统加入了不确定项以保证设计的控制系统具有高精度和强鲁棒镇定能力。本文在进行飞机防滑刹车系统建模时加入不确定项代表系统的不确定性和系统所受到的外部随机扰动,这样不需要对扰动进行建模,同时可以在保证鲁棒性的同时设计控制律[7]。
目前国内装机应用最为广泛最为成熟的防滑刹车系统控制律就是“PD+PBM”控制律[8],这种控制律具有结构简单、实现容易、稳定可靠的优点,但是同时这种控制律存在低速打滑,鲁棒性差等问题,且低结合系数跑道上的表现尤为突出,使得刹车系统的后期防滑效率低下,从而导致整体刹车性能大打折扣,难以适应现在飞机对于防滑刹车系统的高性能要求。通过深入研究防滑刹车系统原理可知,造成“PD+PBM”刹车控制律产生上述缺陷的原因主要是因为飞机防滑刹车是一个具有强非线性和不确定性的过程,建立在模型基础上的“PD+PBM”控制显然难以获取最佳刹车性能[8]。为了提高刹车系统的控制性能,文献[9]设计了基于切换增益和边界层厚度的参数自适应滑模控制器;文献[10]设计了防滑刹车的自适应模糊PID控制器;文献[11]设计了基于T-S模糊神经网络的控制器;文献[12]设计了基于广义卡尔曼滤波的变结构控制器;文献[13]将CMAC神经网络与PID控制器相结合,提出了CMAC-PID复合控制器;文献[14]提出了一种基于近似动态规划的自适应最优控制方法,但上述研究均未考虑到防滑刹车系统模型不确定性与外部干扰对控制的影响,这可能会导致设计的防滑刹车系统控制器在复杂的刹车环境中鲁棒性较差。而对于防滑刹车系统存在不确定性与外部干扰的问题,滑模控制由于具有快速响应,对于不确定性扰动具有不变性以及不需要被控系统内部解耦等突出优点[15],因而非常适合防滑刹车系统的滑移率控制,因此本文设计了防滑刹车系统基于指数趋近律的滑模控制律。
同时传统的滑模控制应用在防滑刹车系统中存在控制量的高频抖振[16],这会损坏液压伺服系统中的设备,减少控制机构的使用寿命。所以需要通过抑制控制输入的抖振来改进滑模控制律,将有害的抖振减小到一定的程度,并且保证滑模控制的不变性。本文基于对滑模控制原理进行定性分析,运用模糊理论对防滑刹车系统传统滑模控制律进行改进,设计了防滑刹车系统基于模糊指数趋近律的滑模控制律。
基于以上分析,本文建立了含有外部随机扰动的飞机防滑刹车系统的地面动力学模型,利用滑模理论设计了防滑刹车系统基于指数趋近律的滑模控制律,然后针对滑模控制中控制器的输出具有抖振的问题,对控制律进行改进,设计了防滑刹车系统基于模糊指数趋近律的滑模控制律。
2 系统建模
2.1 飞机防滑刹车数学模型
2.1.1 机体数学模型
本文只考虑飞机的纵向、垂直、和俯仰运动,并做如下合理假设:
1)假定受刹和防滑机构性能一致,则刹车控制简化成为对于单机轮的控制;
2)将飞机的机身和起落架视为理想刚体,不考虑机体发生的弹性变形;
3)不考虑侧风对地面运动的影响;
4)以地面跑道为惯性坐标系。
依据假设,则飞机的地面滑跑受力分析图如图1所示。
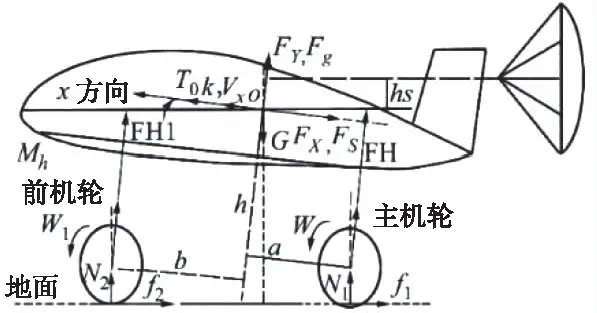
图1 飞机的地面滑跑受力分析图

(1)
式中参数及其代表含义参见文献[17]。
飞机地面滑跑主要考虑纵向受力,仿真建模中将飞机的升力和俯仰力矩视为定值。因此,(1)式中的竖直方向受力方程和俯仰力矩方程简化为(2)式。

(2)
取x1=Vx,即飞机纵向速度。将(2)代入(1)式中的纵向受力方程中,并有f1=u·N1,f2=uf·N2,其中u为主轮摩擦系数,uf为前轮摩擦系数,主轮为受刹机轮,其摩擦系数由魔术公式得u=Dsin(Carctan(Bσ),则得(3)式


(3)
2.2.2 机轮动力模型
刹车过程中刹车力作用在主机轮上,主机轮刹车过程运动方程可描述如下:

(4)
式中,Tj=Rvbf,Tb=KbPb
取x2=w,得到(5)式

(5)
2.3 含有不确定扰动的飞机防滑刹车系统模型
由于飞机刹车过程中呈现的强非线性特征,很难进行精确建模,现有的对防滑刹车系统的控制律研究基于的模型多是对系统非线性进行近似线性化的处理,这容易造成由于模型误差对刹车控制的影响。同时也未考虑到飞机在刹车过程中所遇到的不确定扰动,无法保证设计的控制律在复杂的刹车环境的仍然具有良好的控制效果,因此本文在进行刹车系统模型时考虑外部随机扰动,目的是在保证鲁棒性的情况下设计控制律。建立的含有不确定扰动的防滑刹车系统如微分方程组(6)所示。

(6)
式中,d1(x,t)和d2(x,t)分别是飞机速度和机轮速度所受到的不确定性扰动,D1(x,t)和D2(x,t)分别是是|d1(x,t)|和|d2(x,t)|的上界函数,即:|d1(x,t)|≤D1(x,t),|d2(x,t)|≤D2(x,t)。
3 控制算法
3.1 PD+PBM控制算法基本原理
现行飞机防滑刹车系统多采用“PD+PBM”控制律,就是PID的积分级采用平方形式进行放电来实现压力偏调,以保证在每次打滑解除后系统有足够的时间来维持刹车压力处于较低的水平,防止二次打滑。当速度差大于某一门限值时,控制器控制防滑电流逐渐增大,且误差小时增长率小,误差大时增长率大,当速度差小于某一门限值时,则控制器控制防滑电流逐渐减小以增大刹车力矩重新寻找地面最大结合系数,其表达公式如下:

(7)
3.2 滑模控制律的设计
3.2.1 滑模控制基本原理

3.2.2 基于指数趋近律的滑模控制器
将飞机防滑刹车系统数学写成如下具有不确定性的非线性系统

(8)
式中
设计设计滑模面为:

(9)
式中,σd是期望滑移率,对滑模面取微分并考虑指数趋近律得:

(10)
则有

可解得控制律
[ε+P(x,t)]sign(s)+ks)
(11)
定理:对于系统(6),在控制律(11)的作用下,滑动模态存在且可达。

≤-ε|s|-ks2

这样,采用控制律式(11),系统的滑动模态存在且可达。(证毕)
3.3 基于模糊理论的滑模控制律优化

(12)

以sn=s作为模糊控制器的输入,ε和k分别为模糊控制器的输出。定义sn和ε的语言值为:{PB,PM,PS,Z,NS,NM,NB}分别代表正大,正中,正小,零,负小,负中,负大。k的语言值为:{PS,PM,PB},分别代表正小,正中,正大。
图2为sn的隶属函数图,其论域为[-30,30];



图2 sn的隶属函数图

图3 ε的隶属函数图

图4 k的隶属函数图
基于以上的定性分析,定义的模糊控制规则如表1。

表1 模糊规则表
根据控制规则并采用文献[18]介绍的MIN-MAX-重心法,可以将模糊控制器输出转化为精确的控制量


将选取好的ε和k代入(10)式,可得模糊指数趋近律。考虑控制量,则飞机防滑刹车系统的模糊指数趋近律滑模控制控制量为


(13)
飞机防滑刹车系统基于模糊指数趋近律的滑模变结构控制框图如图5所示。

图5 基于模糊指数趋近律滑模变结构控制框图
4 仿真结果
4.1 仿真参数设置
文中提出了飞机防滑刹车系统的基于模糊滑模趋近律的滑模控制律。使用MATLAB/Simulink仿真软件,仿真步长为0.001s。机轮的初始速度为72m/s。设置d1(x,t)和d2(x,t)为上下界为±2的随机扰动信号;传统滑模控制律参数设置:ε=20,k=20;引入模糊控制后,θ1=20,θ2=30,仿真终止条件为飞机速度小于1m/s。为便于表述,所设计的传统滑模控制律(Sliding mode control)简称为SMC,基于模糊指数趋近律的滑模控制律(Sliding mode control based on fuzzy exponential approach law)简称为FSMC。
4.2 PD+PBM控制律与基于模糊指数趋近律的滑模控制律下刹车性能对比
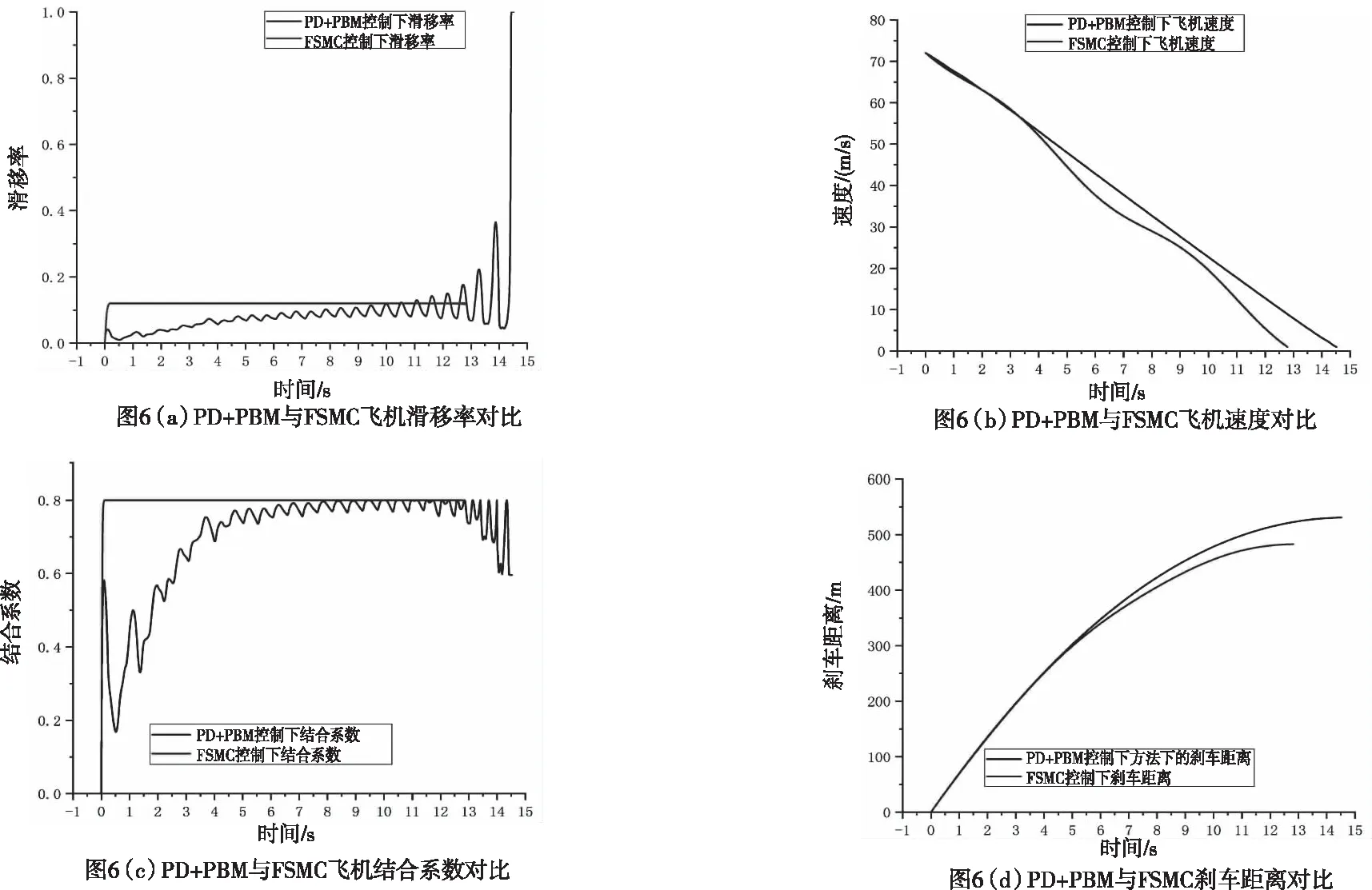
图6(a)(b)(c)(d)分别是防滑刹车系统传统的PD+PBM控制器和设计的FSMC下的滑移率、飞机速度、结合系数,刹车距离对比图。由图6(a)可以看出,传统的PD+PBM控制器控制下飞机滑移率在刹车高速段低于最佳滑移率,不能最大程度的利用地面结合力,而在低速段又出现了较为严重的打滑现象。而设计的FSMC控制律能够使飞机的滑移率快速达到并保持在最佳滑移率。由图6(b)和图6(d)可以看出,传统PD+PBM控制律控制下的刹车时间和刹车距离分别是14.7秒和523米,而FSMC控制律控制下的刹车时间和刹车距离分别是12.9秒和459米,可见FSMC控制律下的刹车时间减少1.8秒,刹车距离减少64米。由图6(c)可以看出传统的PD+PBM控制器控制的刹车过程无法保持的最佳结合系数,地面结合力利用程度低,而设计的基于模糊指数趋近律滑模控制器可以使得飞机快速到达最佳结合系数并在整个刹车过程中保持在最佳结合系数0.8,充分利用了地面结合力。综合对比两种控制律可以看到,PD+PBM这种控制方式由于其设置固定减速律并且无法很好的适应刹车系统的非线性及不确定性,导致其无法很好的利用地面结合力,刹车效率低;而FSMC控制律由于具有快速响应和对不确定性扰动的不变性的优点,解决了PD+PBM低速打滑的现象,刹车效率高,改善了刹车性能。
如图7(a)(b)指数趋近律滑模控制下,干跑道和湿跑道条件下飞机的滑移率对比。可以看出传统的PD+PBM控制律下,低结合系数的跑道中其低速打滑的现象更为严重,刹车效率更低;而在FSMC控制律下,飞机在低结合系数中仍旧能够在整个刹车过程中保持最佳滑移率,充分利用地面结合力。

4.2 传统滑模控制律与基于模糊指数趋近律的滑模控制律刹车性能对比
由图8(a)和图8(b)可以看到,基于模糊指数趋近律滑模控制律(FSMC)抑制了传统滑模控制律(SMC)下的控制输出的抖振,改进后的基于模糊指数趋近律下的抖振幅度仅为传统滑模控制律下的16%,获得了较为平缓的控制效果,提高了控制品质,并且避免防滑刹车系统的控制机构被过大幅度的抖振所破坏。

4.3 基于模糊指数趋近律的滑模控制律的鲁棒性
图9(a)和图9(b)分别是原不确定性扰动和扰动扩大一倍的条件下,基于模糊指数趋近律滑模控制下飞机滑移率和结合系数的对比。可以看出即使飞机所受到的不确定性扰动扩大一倍,飞机在所设计的基于模糊指数趋近律滑模控制律控制下,仍旧可以保持最佳的滑移率0.12和最佳结合系数0.8,说明所设计的基于模糊指数趋近律滑模控制律具有良好的鲁棒性。

5 结论
仿真结果表明,所设计的基于模糊指数趋近律的滑模控制律能够很好的利用跑道的结合力,刹车效率高;并且能够适应防滑刹车系统的强非线性和不确定性;解决了传统的PD+PBM控制律中存在的低速打滑,鲁棒性差的问题;同时可以很好的抑制控制输出的抖振,获得较为平缓的控制效果,提高控制品质,并且对于跑道条件的变化和外界的不确定定性扰动具有良好的鲁棒性,设计的控制律合理有效,刹车效率高。