基于数字孪生的智能网联汽车创新实验平台探索与研究
2022-08-19李永福周发涛王锦江樊俊宏朱浩
李永福,周发涛,王锦江,樊俊宏,朱浩
(重庆邮电大学 自动化学院 智能空地协同控制重庆市高校重点实验室,重庆 400065)
智能网联车辆作为智能交通系统的一个重要研究方向,现阶段正处于快速发展中,其相关学科如机器人工程、自动化等具有专业性强、覆盖知识面广、对实践能力要求高等特点[1]。同时其含有的技术价值,在节能减排、驾驶安全以及交通效率等方面蕴含巨大的潜力,对我国汽车产业技术升级与转型、发展技术优势意义深远。随着高等院校在该领域研究的逐步深入,对实践实验数据的要求也在逐步提高。目前受各种条件的限制,部分高校教师和学生在实践应用上存在资源不足和教学平台缺乏等问题[2]。
基于上述情况,本文应用数字孪生技术[3]作为虚拟世界和现实世界之间的桥梁,结合传感器收集到的车辆实时状态数据,将两个世界联系在一起设计创新实验平台。该平台不仅解决了现阶段高等院校在智能网联汽车相关教学活动中缺乏实验教学平台的问题,同时能够满足学生在实践过程中的多样性需求,开发学生的创新能力以及提高学生解决实际工程问题的能力。同时也符合现阶段教育、社会的发展需求,有助于提高学生的综合素质能力,培养学生后续进入岗位工作的一些必备技能。
1 创新实验平台内容构建
1.1 实验平台总体结构
考虑实验平台常用的教学环境以及实际的智能网联汽车测试环境,将多方面的元素综合纳入平台结构设计,充分保证学生在使用过程中的多样性。如图1所示,以虚拟世界PreScan 和Matlab 仿真软件为基础,结合现实世界车辆系统以及外部传感器、数据通信以及数据处理完成该实验平台的设计。
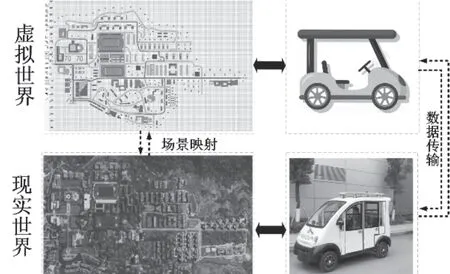
图1 创新实验平台架构
1.2 虚拟世界框架描述
(1)场景搭建。
在智能网联汽车仿真软件PreScan 中,基于基础设施、环境元素和交通参与者等预定义模型或通过Model preparation tool 接口导入自主设计的模型,进行虚拟仿真场景的搭建,能够充分满足学生的可变设计要求。对于学生开展智能网联汽车的虚拟测试实验,本平台提供了快速的场景搭建能力。
(2)环境感知。
环境感知模块的任务是感知车身周围的道路信息以及交通环境,从而为智能网联汽车的决策控制提供可靠的信息来源。为研究网联环境下的智能车辆控制,本平台主要采用了V2X 传感器和GPS 传感器,分别用于获取车辆周边信息和车辆自身信息[4,5]。
(3)算法加载。
算法加载模块在整个仿真平台的运行中承担着核心作用。PreScan 采用了标准的Matlab/Simulink 接口作为控制系统的设计基础,因此算法加载将在Matlab/Simulink 中完成,学生在实际运用过程中,可通过Simulink 模块、m 文件或Stateflow 编程等方式完成算法的加载,其标准化和多样化的编程方式,一方面降低了学生的上手难度,另一方面为学生提供了更多选择,有利于激发学生的学习积极性。
(4)交互界面。
交互界面作为虚拟平台与使用者进行信息交互的介质,主要是在Matlab/Guide 工具箱中完成。基于Matlab/Guide 工具箱开发仿真平台的交互界面具备开发周期短、功能性强、实践效果显著等特点[6],对学生运用Matlab 进行编程的能力提出了要求,有利于提高学生的实践编程能力,激发学生的界面开发兴趣。
1.3 现实世界框架描述
现实世界中以真实车辆为基础,搭载主控单元、交互设备、通信模块和无线路由以及GPS 传感设备等。
(1)主控单元。
主控单元,本平台采用的是基于ARM 架构的嵌入式E9 板,基于Linux 的操作系统,利用多线程、多进程技术实现GPS 信息采集、与通信模块之间的车辆状态信息收发以及与人机交互平板之间的信息交互。
(2)交互设备。
本平台采用搭载基于安卓应用软件的平板,实现车辆与驾驶人员之间的交互,通过人机交互APP 显示车辆的实时状态信息和实时建议行驶速度,采用数字和曲线两种呈现方式,给驾驶员提供合理的行驶信息。
(3)通信模块。
通信模块作为整个外部设备中信息交互的核心载体,在保证通信速度快、与其他设备交互灵活、信号收发稳定的前提下,本平台采用汉枫HF8104 通信模块用于实现4G 通信接口的提供,该模块支持多种协议,接入其他端口便捷;同时,配合高性能路由器,能够保证整个车内局域网中所有设备的相互访问和通信。
(4)GPS 传感设备。
车辆上的GPS 传感设备主要是利用差分GPS 实现精确的信息获取。通过搭载的移动GPS 接收机,该设备一方面获取基准站传回的GPS 信息,一方面实时接收GPS 卫星信号的定位信息。通过基准站已知的精确坐标,计算基准站到卫星的距离改正数,最终得到较为准确的定位信息。
2 创新实验平台实验过程设计
在已构建的虚拟世界平台和现实世界平台的基础上,本文提供典型队列控制算法设计和基于数字孪生的队列控制实验。
2.1 车辆队列算法设计
2.1.1 间距策略
间距策略主要可以分为恒定间距、恒定时距和非线性间距策略。为了提高车辆队列的串稳定性和安全性,本案例采用恒定时距策略,其数学表达式如下:

其中r是各相邻车辆之间静止时的间距,hd是车头时距,vi(t)是t时刻第i车的速度。
2.1.2 车辆模型
车辆模型描述如下:

其中xi(t)是第i辆车的重心位置,ui(t)是控制器输出的期望加速度。
2.1.3 车辆队列控制器设计
本案例结合车辆间耦合作用、反馈控制和前馈控制[7],设计车辆纵向控制器如下:
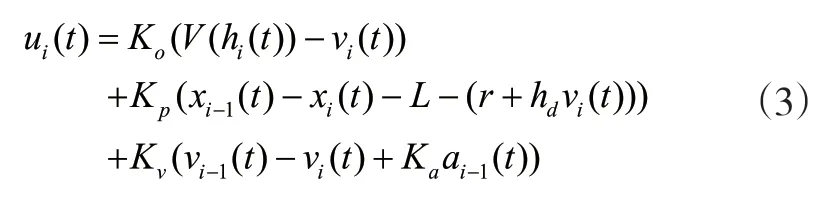
其中ai-1(t)是第i-1 辆车的实际加速度。hi(t)=xi-1(t)-xi(t)-L是i车与i-1 车之间的车辆间距。Ko,Kp,Kv,Ka是敏感系数。L是车辆车身长度。V(hi(t))是代表车辆间耦合作用的非线性函数,它可以有效避免负速度和负间距的产生[7]。
2.1.4 控制目标
本案例的控制目标是使所有车辆的速度与车辆间距保持一致,形成车辆队列行驶,其数学表达式如下:

2.2 实验设置
2.2.1 场景设置
虚拟场景为PreScan 中构建的3D 场景,如图2所示,呈现了在PreScan 中重构的重庆邮电大学南部校区的3D场景。

图2 虚拟世界场景
现实场景由测试环境以及网联车辆测试系统组成,图3展现了在重庆邮电大学南部校区由三辆车组成的网联车辆测试系统,每辆车上搭载了通信设备、GPS 设备、人机交互设备等模块。
2.2.2 实验参数设置
在本案例中,虚拟世界的采样时间间隔设置为0.05s。领航车辆的初始位置设定为x0(0)=14.8m,跟随车辆的初始位置设定为x(0)=[7.4,0]Tm,领航车辆的期望速度如公式(5)所示:

车辆的初始速度设定为v(0)=[0,0,0]Tm/s。
2.3 创新实验平台结果分析
2.3.1 数据交互
虚拟-现实世界之间的数据交互主要是通过车载4G 通信模块完成。通过建立虚拟世界与实现世界之间的UDP 通信协议,实现虚拟世界和现实世界之间的信息交互。数据交互具体流程如下:(1)实际车辆状态信息数据采集,(2)车辆数据打包,(3)车辆数据发送,(4)仿真平台接收数据与反馈。
2.3.2 队列控制
通过在虚拟世界和现实世界之间建立数据交互,现实世界采集到车辆实时状态信息后发送到虚拟世界中,虚拟世界解析接收到的数据,并在车辆队列控制器的作用下,计算出跟随车辆1 和2 的期望加速度,并将该期望加速度指令转换为驱动仿真世界中车辆行驶的指令,同时将控制信息反馈到现实世界的人机交互平板APP 中,人机交互平板APP 经数据解析后呈现出建议的行驶信息,驾驶员由此完成对真实车辆的操控,最终实现虚拟世界和现实世界中车辆的平行行驶。
2.3.3 实验结果分析
图4呈现了所有车辆的速度曲线,在t∈[0,10]s区间内,车辆从静止状态逐渐加速到4.17m/s 的期望速度,当领航车辆达到期望速度后,跟随车辆1 和2 也能在稍滞后的时间内跟随行驶。图5车辆间距误差曲线图中,可以看出车辆在现实世界的相对位置变化情况,验证了所设计的平台的有效性。
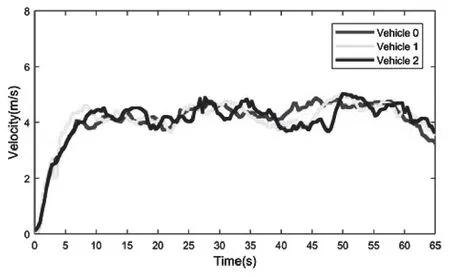
图4 车辆速度曲线
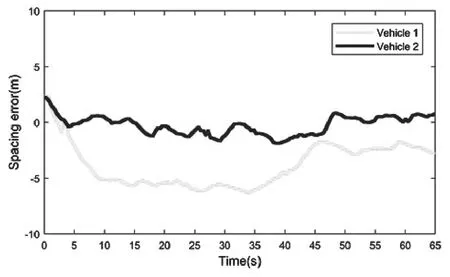
图5 车辆间距误差曲线
3 结语
本创新实验平台具备测试环境可控性、开放性、操作简易、可重复仿真、实验成本低等优点。并且通过此创新实验平台,可以在教学过程中实现从虚拟到现实、从理论到实践的完整课程体系。由理论知识到仿真实现,再从仿真实现到实车验证,逐渐延伸,提高了学生的自主创新能力和学习积极性。同时,本平台有效地将理论与实践相融合,促进了实践教学的发展,有助于完善课程体系,培养既具有交叉学科背景又具有前沿科学知识的人才,为智能网联汽车学科群建设提供支撑。