多功能辅助健身器械的设计
2022-08-17丁麒谕梁佧楠洪昌琪沈国栋马新玲
丁麒谕,梁佧楠,洪昌琪,沈国栋,马新玲
华东理工大学 机械与动力工程学院,上海 200237
目前市面上流行的健身器材存在着功能单一、产品同质化严重[1]、科技智能元素欠缺以及价格昂贵等问题。例如Alter G 反重力跑步机[2],科技感十足,但是价格昂贵;攀爬健身器[3],功能单一,运动时存在一定的安全隐患;虚拟保龄球游艺健身机[4],具有丰富的趣味性,但是健身效果存在缺陷。这些不足使得运动无法持续给用户带来新鲜感,难以养成健身的习惯。与此同时,平日里缺乏健身经验和知识的人,在居家环境中缺乏必要的、科学的健身动作指导,不仅容易造成健身活动的盲目性与无序性,更易产生运动损伤的风险隐患[5]。
本文设计了一款针对核心肌群锻炼的多功能辅助健身器械,通过机械结构与传感器控制系统的协作,实现了俯卧撑、平板支撑运动助力的多级调节,以及其他多种针对核心肌群训练的辅助功能。在做到高度自动化的同时,提供了个性化的选择与调节,交互友好、经济实用。
1 总体方案设计
整机结构如图1 所示。本机器通过多模块的协调运作,可实现俯卧撑、平板支撑、仰卧起坐以及各类转体动作的运动辅助功能,同时,可在俯卧撑与平板支撑的运动中为缺乏力量的用户提供腰部助力,并在结束运动后自动清洁机器表面滴落的汗渍。

图1 整机三维模型图
首先,用户通过机器上的触摸屏输入身高、体重等信息,选择运动类型并观看教学视频;之后,选择是否需要助力。接着,各模块电机将根据用户选择,执行指定命令。机器各辅助功能模块工作流程如下。
俯卧撑辅助:首先,龙门握把根据所选俯卧撑的宽窄,移动到指定位置;其次,助力装置将移动到使用者的腰部位置,移动距离由用户输入的身高计算得出;再次,弹力调节模块的步进电机控制转换座,拉伸弹力绳达到指定位置;最后,舵机控制助力杆抬起,因棘轮的单向运动,使其停留在用户腰部高度位置。运动中,用户俯身下压,拉伸弹力绳,产生的回弹力即可为运动提供助力。
平板支撑辅助:首先,龙门握把移动至机器两侧,为平板支撑放置的肘部留出充足空间;其次,同俯卧撑辅助中的助力调节相同,助力杆最终停留在用户腰部高度位置,用户轻轻下压便能获得持续的支撑力。
仰卧起坐辅助:首先,龙门握把移动至机器两侧,为仰卧起坐留出充足空间;其次,助力装置伸出,助力杆旋转至仰卧起坐的固定位置。此时用户坐于机器中央的扭腰盘上,助力杆压住双脚作为脚扣,防止仰卧起坐运动中双脚翘起;两侧的龙门握把可为起身困难的用户提供辅助支撑。
转体辅助:首先,龙门握把移动至机器两侧,为转体留出充足空间;其次,扭腰盘可提供扭转阻力,增加扭腰运动的锻炼效果;同时,龙门握把可稳固用户躯体,防止运动过程中用户因核心力量缺失导致的身体倾倒。
自动清洁:用户点击结束运动后,龙门握把模块的步进电机将带动清洁抹布往复运动,对机器表面滴落的汗渍进行擦拭清洁,起到一定的卫生防护作用。
2 各模块单元设计
多功能辅助健身器械的机械结构可分为5 个模块:龙门握把模块、剪叉伸缩模块、棘轮角度调节模块、助力调节模块和阻尼扭盘模块。
2.1 龙门握把模块设计
功能:实现对不同肩宽人群和各式俯卧撑的适配,提供自动清洁功能。优势:结构稳固,一物多用。
如图2 所示,龙门握把模块由一个42 步进电机驱动,通过3 个相同的直齿圆锥齿轮将运动传递给2 根旋向相同的滚珠丝杆,从而使丝杆螺母上的螺母座运动。螺母座通过一个连接板与龙门架相连,2 根光杆通过直线轴承滑块与连接板相连,以增强龙门握把的结构稳定性。连接板两端导轨需横向放置,而直线导轨与滚珠滑块无法承受与其受压面平行的力,因此,为减小水平移动的摩擦力,承担使用握把时向下的压力,连接板采用了石墨黄铜滑块与圆柱导轨配合的方案。
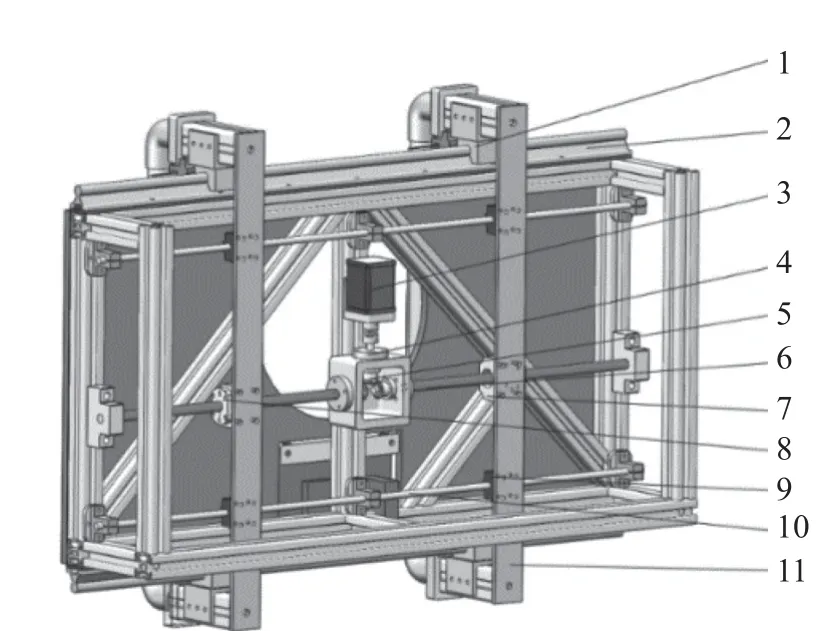
图2 龙门握把模块
不同类型俯卧撑对应的握把间距通过控制步进电机的步进圈数得到。滚珠丝杆的导程为4 mm,直齿圆锥齿轮的传动比为1,因此电机每转动一圈,握把水平移动4 mm。通过用户输入的身高H计算出肩宽h,男性h=0.222H,女性h=0.213H[6]。以两握把之间的中心位置建立x轴,根据中距俯卧撑手部位置略大于肩宽,握把运动到0.55h位置处大致满足要求[7]。同理可得,窄距俯卧撑的距离为0.25h,宽距俯卧撑为0.75h。
龙门握把上额外加入了可拆卸的清洁装置。如图3 所示,清洁抹布由蝴蝶夹固定在清洁板上,清洁程序启动时,步进电机带动抹布随着龙门握把一起移动,在机器表面来回擦拭,对滴落的汗渍起到基本的清洁作用。蝴蝶夹的设计,使得更换抹布轻松简便,有效保障了器材的卫生状况。
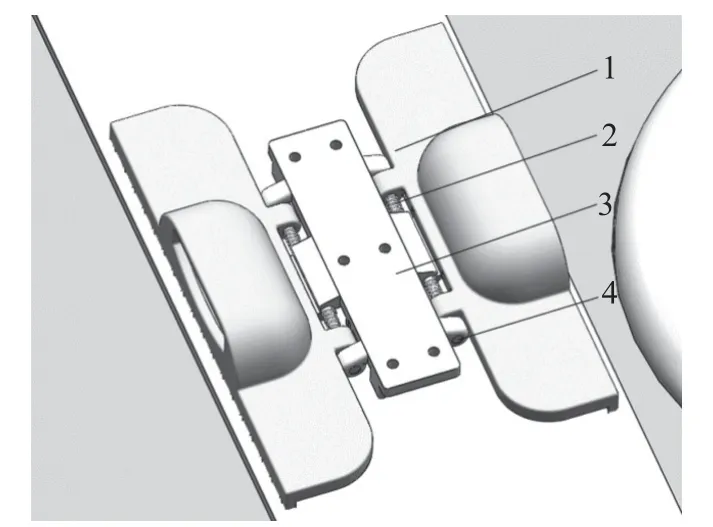
图3 可替换式抹布夹结构
2.2 剪叉伸缩模块设计
功能:减小占地面积,适配不同身高的人群,提高泛用性。优势:占用空间小,展开范围大,精巧可控。
如图4 所示,剪叉伸缩模块主要由三级剪叉式伸缩臂、100 mm 行程的电动推杆和连接组件组成,推杆连接在第一级铰接处。运行时,电动推杆启动,通过剪叉伸缩臂,将连接组件上连接的棘轮角度调节模块推到指定位置。

图4 剪叉伸缩模块
剪叉伸缩臂的第一级铰接处加入了矫正杆,插入底座上的直线槽中,有效防止了剪叉伸缩臂的左右移动,增加了移动定位的精准度。
剪叉伸缩杆运动结构如图5 所示,图中每一段剪叉的长度AD=340 mm,电动推杆EF行程为100 mm,剪叉伸缩臂左右最大距离ABmax=320 mm,最小距离ABmin=154 mm。计算得第一级铰接处距推杆起点最小距离Ye,min=57.44 mm,最大距离Ye,max=151.56 mm,因此推杆伸缩范围ΔY=94.12 mm<100 mm,满足推杆行程要求,因此剪叉伸缩杆的调节范围为344.64~909.37 mm。
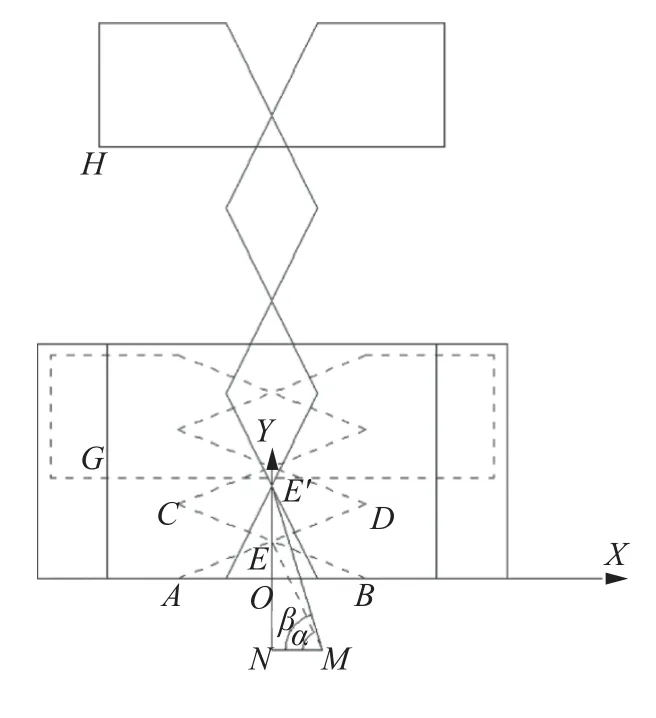
图5 剪叉伸缩杆运动结构简图
令MN段的长度lMN=m0,MN段与EM段的夹角∠EMN=α,此时lMN=m0/cosα;假设推杆推出后E′M段与MN段的夹角∠E′MN=β,此时推杆长度lME′=m0/cosβ,推杆伸长量Δl=m0/cosβ-m0/cosα,第一级剪叉推出的距离ΔlEE′=m0/tanβ-m0/tanα,则三级剪叉推出距离为6ΔlEE′。由此可求出推杆伸长量Δl与助力装置位移ΔX的关系:

龙门握把中心G与助力杆位置H的距离lGH可达600 mm。根据最新研究显示[8],中国18~44 岁男性和女性的平均身高分别为169.7 cm 和158 cm,而肩高约为身高的0.844 倍,脐高为0.600 倍,计算得出俯卧撑和平板支撑运动中手臂支撑位置与腰部助力位置的距离大约为414.06 mm 和385.52 mm,设计满足使用需求。
2.3 棘轮角度调节模块设计
功能:调节助力杆角度,增加运动种类。优势:结构巧妙,控制简单,作用强大。
棘轮角度调节模块的核心结构是一种双向式外啮合棘轮机构,如图6 所示。该机构主要由棘轮、弹力绳固定杆、活动板、限位板、弹簧和棘爪组成,由一个30 kg 的舵机进行驱动。
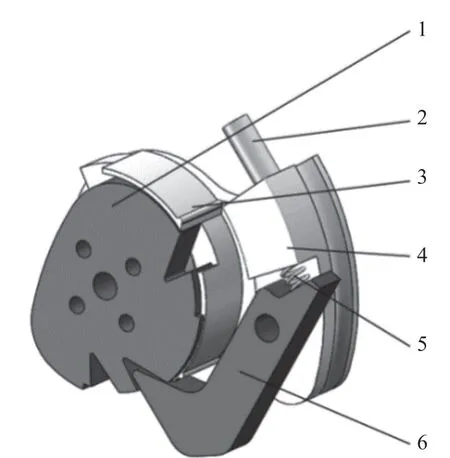
图6 双向式外啮合棘轮机构
其中棘轮、活动板、限位板同轴心放置,各自结构如图7 所示:棘轮与助力杆固接,棘爪连接在限位板上,并通过弹簧保证其能够始终压紧齿面;活动板上有一圆弧形滑轨,与棘轮上的限位杆配合;限位板上开有一道凹槽,弹力绳从弹力固定杆上通过凹槽进入弹力调节模块,凹槽的存在有效地防止了弹力绳的左右晃动。
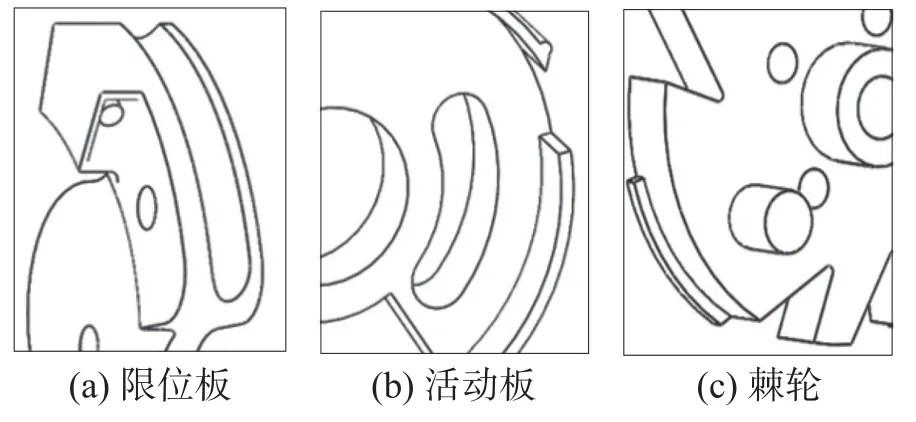
图7 棘轮结构细节
该机构工作具体流程为:舵机接收展开指令,驱动助力杆与棘轮顺时针旋转,棘爪从齿背上滑过,此时活动板与限位板均相对静止。达到指定角度后,舵机停止旋转,同时棘爪插入齿槽中,阻止棘轮逆时针方向反转,此时即为助力装置工作位置。进行俯卧撑练习时,人体俯身下压,棘轮受到逆时针方向的力矩,而由于棘爪的限制作用,将带动限位板一起逆时针转动,从而拉伸连接在弹力绳固定杆上的弹力绳,获得稳定变化的助力。装置收缩复位时,舵机首先继续驱动棘轮顺时针旋转,棘爪从齿背上滑过。由于此时棘轮上的限位杆到达活动板轨道的末端,继续顺时针旋转将带动活动板旋转。棘爪从齿背上滑过后,将被活动板推离齿面,由于摩擦力和活动板表面的小凸起,使得棘爪将停留在活动板表面。此时舵机逆时针旋转,即可实现棘轮的顺利复位。
同理,舵机旋转更大的角度,可实现仰卧起坐的固定作用。活动板圆面与棘爪接触部分的空槽保证了棘爪能够顺利进入仰卧起坐对应角度的棘齿中,进入工作状态;在复位时顺利被活动板推开,使复位运动顺利进行。在棘轮上,仰卧起坐与俯卧撑对应的棘齿之间有一与活动板等高、厚度为2 mm 的凸起,该凸起使得仰卧起坐棘轮进行复位时不会卡入活动板圆面的空槽中,顺利完成复位。
针对棘轮棘爪啮合的设计,进行了如图8 所示的校验。当棘爪与棘轮在齿根P处啮合时,棘轮轴心O2与棘爪轴心O1的位置基本满足O1P⊥O2P,即∠O1PO2≈90°。此时在传递相同的力或转矩时,棘爪受力最小[9]。

图8 棘轮棘爪轴心位置
2.4 助力调节模块设计
如图9 所示,助力调节采用通过步进电机控制丝杆,改变弹力绳原长的方案。弹力绳一端连接在转换座上,另一端与棘轮角度调节模块中的限位板相连,控制步进电机的转动,即可控制转换座前后移动。改变弹力绳原长,从而改变助力大小。
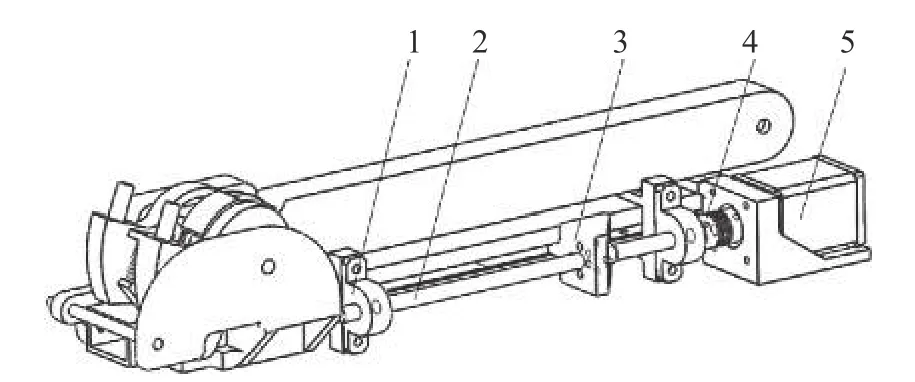
图9 助力调节模块
针对可提供的助力大小进行了如下计算。如图10 所示,弹力绳系于A点,A点到支点O的距离lOA=80 mm,为平衡力矩,采用2 根弹力绳对称放置的方式,总体弹性系数k=1.8 N/mm,转换座移动范围CD=200 mm,使用时受力点为B点,B点到支点O的距离lOB=360 mm。

图10 助力力矩示意
令丝杆在C点时弹力绳恰好松弛,弹力最小Tmin=0,则在D点时弹力绳弹力最大Tmax=360 N。由力矩平衡可得提供的助力Fb=80 N。由计算得出该装置可提供的助力最大为80 N,满足运动所需的助力需求。
2.5 阻尼扭盘模块设计
功能:提供扭腰运动的运动阻力,增强锻炼效果。优势:结构简单,复位稳定。
如图11 所示,阻尼扭盘模块由5 个部件组成,其中,燕尾榫呈正六边形分布,通过拉簧与中心件相连,中心件固定在铝型材上。坐垫旋转时,拉簧将被拉伸,随着转动角度的增大,将得到一个逐渐增大的回弹力,该回弹力即为扭腰运动的运动阻力。拉簧六边形角度的设计,在提供充足阻尼的同时,保证了扭盘复位的稳定性。

图11 阻尼扭盘模块
3 运动计数、控制系统与交互界面
3.1 运动计数原理
针对俯卧撑增加了运动计数模块,采用超声波计数的方案[10]。超声波模块直接用途为测量距离,采用IO 触发测距,模拟自动发送8 个40 kHz 的方波,通过IO 输出一高电平,高电平持续时间就是超声波从发射到返回的时间。采用HC-SRO4 超声波测距模块[7],探测范围为2~450 cm,精度高达0.3 cm,适用于俯卧撑胸部到设备之间距离的测量。
每一次俯卧撑之间的时间间隔为一确定范围值,若将此值设为t1,在运动过程中,下降身体、短暂停留、用力撑起这3 个阶段用时基本相同,每段时间设为t2=1/3t1,因此Arduino 发出高电平的时间间隔应稍大于t2。与此同时若使用者胸前与超声波模块之间距离小于3 cm,则代表完成一个标准动作,进行计数并循环往复执行,从而实现利用超声波测距来计数。
3.2 控制系统的组成与控制流程
本设计控制系统主要由控制器Arduino[11]、人机交互界面HMI[12]、各类传感执行元件及配套通讯、电源系统组成,系统控制流程如图12 所示。

图12 系统控制流程
用户在人机交互界面中输入的身体参数、选择的运动类型通过设定的公式、程序转化为电信号传递给各控制器,各模块协调运作,实现了多种针对核心肌群训练动作的辅助功能。
3.3 人机交互界面
多功能辅助健身器械拥有简单易懂的人机交互界面,如图13 所示,由一块4.3 寸的触摸屏和扬声器组成。在触摸屏上可选择运动类型、播放运动教学视频、选择助力大小以及开启清洁功能等;在运动过程中,可实时显示运动次数、运动时间、锻炼的肌肉部位以及消耗的卡路里量。扬声器进行语音播报,辅助触摸屏,引导用户进行操作与运动。
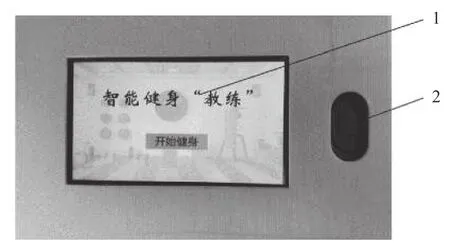
图13 人机交互界面
4 结论
本文设计了一款辅助核心肌群锻炼的居家智能健身器械,借助精巧强大的机械结构与智能简便的交互系统,将5 个核心模块协调运作,适配了多项针对核心肌群的训练动作,具有强大的泛用性;独特的助力体系使得新手健身入门门槛进一步降低,减少了因力量不足导致的肌体损伤,提高了锻炼的体验感。本文提出的多功能辅助健身器械结构考究、功能丰富,满足了居家健身的使用需求。
