减摇鳍装置节能控制技术优化设计
2022-08-17白旭东邓启亮
周 健,白旭东,邓启亮
(1. 上海衡拓船舶设备有限公司,上海 200031;2. 上海船舶设备研究所,上海 200031)
0 引言
减摇鳍装置是一种减小船舶在风浪中横摇的自动控制装置,分为收放式减摇鳍和非收放式减摇鳍,收放式减摇装置见图1。目前国内已成功攻克国外垄断的大型减摇鳍装置技术,自主研发设计的大型减摇鳍装置性能已达到国际先进技术水平并且已成功进入国际高端船舶市场,逐渐在国外船东和总体设计单位中产生积极的影响。目前国际高端船舶市场的船东不仅关注设备的性能,还关注设备的节能参数,节能控制技术优化研究可以使减摇鳍装置更好地适应国际市场,满足国际市场提出的新要求。

图1 收放式减摇装置
通过了解国外减摇鳍装置资料,深入学习国外减摇鳍装置技术并与之对比,目前国外含有节能模式的减摇鳍装置多采用定量泵,但国内的减摇鳍装置采用的是变量泵,设计者在设计产品时已考虑到节能。在此基础上进行控制技术优化,提高减摇鳍装置节能性能。着重研究海况自动识别,以海况为输入核心,减摇鳍装置在自动模式下自动进行逻辑判断并切换为常规模式减摇(双鳍工作)或节能模式减摇(单鳍工作)。该设计方案为减摇鳍装置在节能环保方向迈出重要的一步。
1 节能模式下减摇效果
常规模式下双鳍工作,在海况良好时进入节能模式即单鳍工作。若不更改控制策略,减摇鳍装置的减摇能力将减半,这势必会影响减摇效果。根据减摇力学原理研究发现:
1.1 当实际航速V≤设计航速V0
1)α1为设计航速下的最大工作鳍角,当转鳍角度α≤α1/2,进入单鳍工作时,通过对陀螺仪信号处理,使陀螺仪信号增大至原来的2倍,转鳍角度可以放大2倍,减摇效果能达到双鳍工作的效果。
2)当转鳍角度α在α1/2<α≤α1范围内,进入单鳍工作时,通过对陀螺仪信号处理,使陀螺仪信号增大至原来的2倍,但因电气限幅作用,转鳍角度最大只能达到α1。虽然可以提高减摇能力,但是随着转鳍角度增大提高减摇能力的幅度将越小,当转鳍角度达到α1时便没有提升减摇能力的效果。所以此时不能达到双鳍工作时的减摇能力,但可以提升减摇能力。
1.2 当实际航速V>设计航速V0 时
所以当海况良好,双鳍工作下转鳍角度α普遍小于最大工作鳍角α1,进入节能模式,通过对陀螺仪信号处理,使陀螺仪信号增大至原来的两倍可以有效提高减摇能力,确保在节能的状态下,保证减摇效果。
2 节能控制技术设计
以收放式减摇鳍装置为目标设备,以控制器为逻辑控制核心、在HMI进行人机交互[2],提出一套减摇鳍装置节能控制技术设计方案,节能控制系统流程图见图2。该系统设计增加手动模式和自动模式。控制系统默认在手动模式,手动模式下只可根据人工判断手动控制进入单鳍模式或者双鳍常规模式;自动模式下控制系统根据实际海况,自动判断进入何种工作模式。
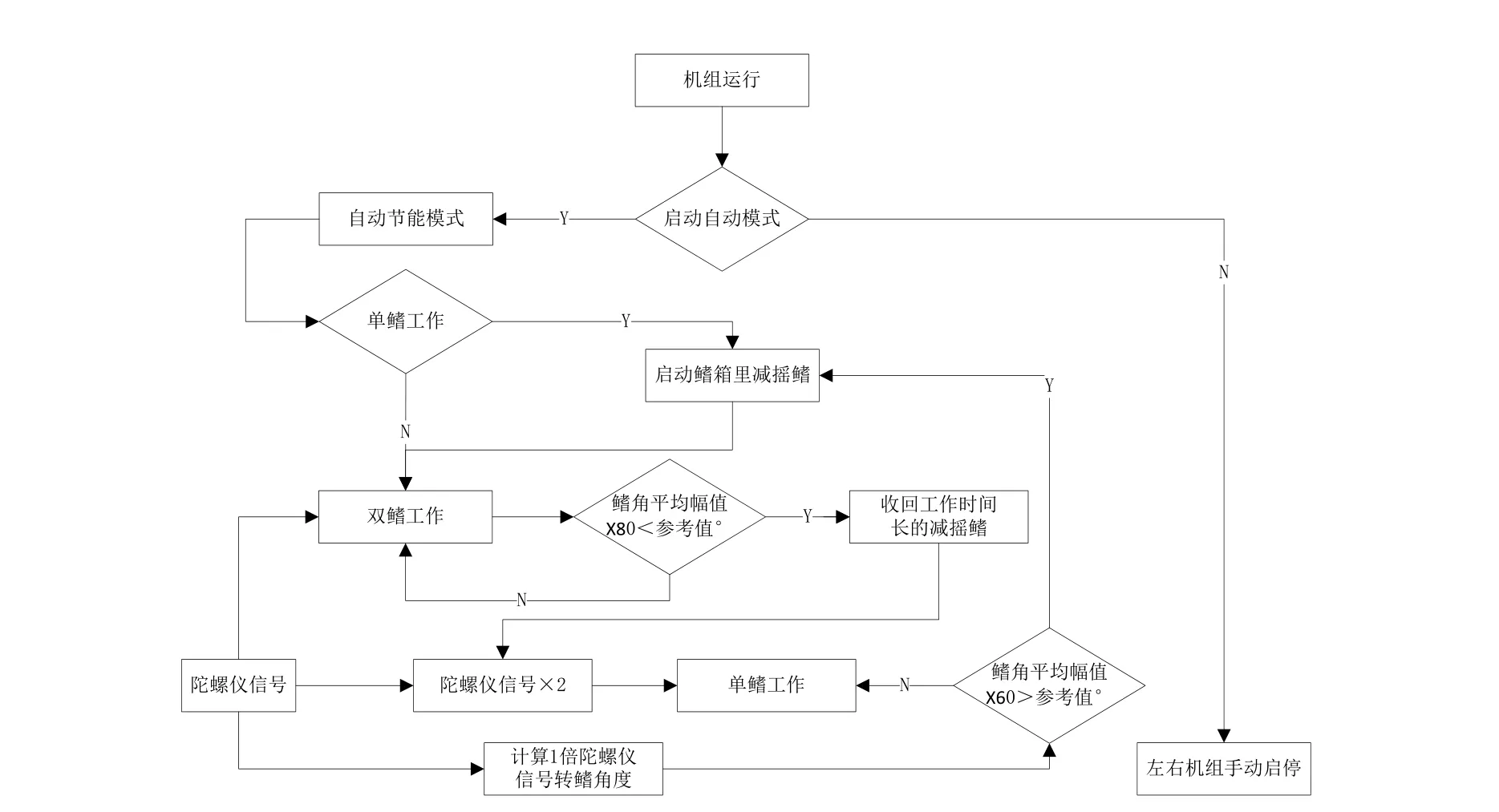
图2 减摇鳍节能控制系统流程图
2.1 手动节能模式设计
在驾驶室操作面板上的触摸屏(HMI)增加手动/自动节能模式弹出界面,增加手动操作软按钮功能以及切换手/自动节能模式等功能软按钮,增加自动节能模式和手动节能模式状态显示,系统默认在手动节能模式,当控制权限在驾驶室操作面板时,用户可根据实际节能需求点击对应软按钮启停对应的减摇鳍。
2.2 自动节能模式设计
2.2.1 自动节能模式鳍角参考值选择1)当实际航速V≤设计航速V0
设置α2为鳍角参考值,当实际航速V≤设计航速V0时,转鳍角度不经航速调节,故鳍角参考值α2也不需要进行航速调节。
2)当实际航速V>设计航速V0

2.2.2 转鳍角度幅值计算
在自动节能模式下选择单鳍工作或双鳍工作时,需要根据转鳍角度的大小来判断海况。以收放式减摇鳍为例,假设设计航速下最大工作转鳍角度幅值为20°,若船自摇周期为14 s,当船以幅值3°的正弦信号横摇运动时,陀螺仪输出船舶横摇信号给控制系统,使减摇鳍减摇转鳍角度达到最大工作角度20°,见图3。

图3 转鳍角度波形图
在自动选择常规模式和节能模式时,实施解算鳍角平均幅值,并与鳍角参考值进行比较,求出大于鳍角参考值的百分比。
2.2.3 海况自动识别和自动模式节能控制
启动机组,当需要进入自动节能模式,切换控制权限至驾驶室操作面板,点击HMI上启动节能模式软按钮切换到自动节能模式,同时系统判断当前是否是单鳍工作,当是单鳍工作时,系统自动放出鳍箱里的另一只减摇鳍,双鳍同时工作。
自动节能模式下,系统自动记录左右鳍工作时间,同时自动判断进入单鳍或双鳍工作模式,当鳍角平均幅值X80%<参考值,系统判断当前海况较好,进入单鳍工作模式;当鳍角平均幅值X60%>参考值,系统判断当前海况较为恶劣,进入双鳍工作模式。当进入单鳍工作时,自动收回工作时间较长的一只减摇鳍。当左右鳍工作时间相同时,收回左鳍。当进入双鳍工作模式,放出鳍箱里的一对减摇鳍。
2.3 安全控制
1)收放式减摇鳍装置鳍放出时,鳍叶会超出船身范围,具有一定的危险性,特别是停靠码头的过程中和停靠在码头时,若自动放出,将产生严重的安全事故。针对安全问题提出解决方案:
(1)减摇鳍装置必须启动机组后,才能在操作面板点击“启动节能模式”软按钮,进入自动节能模式。
(2)在航速4 kn~6 kn时,减摇鳍装置自动收鳍停机,确保在停靠码头的过程中和停靠在码头时的安全。
(3)当接收到侧推信号时,减摇鳍装置自动收鳍停机,确保在停靠码头的过程中的安全。
2)使用频率
在单鳍使用过程中,有可能会使减摇装置两只鳍使用频率偏差较大。根据减摇鳍装置的可靠性要求,各部件都有固定的更换和使用周期,长期单鳍使用不利于设备的维护保养,更不利于装置的可靠性,需保持左右鳍技术状态、使用频率基本一致。
(1)在系统中,增加左右机组各自工作时间,在进入单鳍模式下,系统对左右鳍运行时间进行比较,收回工作时间较长的一只减摇鳍。若左右机组运行时间一致,则收回左侧减摇鳍。
(2)加强船东培训,指导船东正确操作,帮助船东树立安全使用观念,保持左右机组使用技术状态一致。
3 优化节能控制技术价值及意义
液压机组采用变量泵,在海况良好时,机组启动未转鳍时,以75 kW的电机为例,电源电压为400 V,未减摇时的电流表显示为50 A~60 A,此部分为机组运行但未减摇消耗的能量,关停机组此部分的消耗的能量可以节约,达到节能的效果。
从船舶整体分析,收放式减摇鳍装置在使用过程中,鳍从鳍箱内放出之后,船舶行驶过程中会产生阻力,不仅影响船舶行驶速度而且船舶克服该阻力会消耗能量,特别是高航速工况下。若是在海况良好的情况下收回一只减摇鳍到鳍箱内可节约该部分的能量,有助于减小船舶阻尼。
4 结论
该节能技术在减摇效果有保障的前提下进行节能环保,经实船验证,减摇效果和节能效果均达到预期的效果,得到船东以及设计院的认可。目前在全球都提倡节能减排的情况下,在设计减摇鳍装置时也需要考虑到节能环保。随着减摇装置进入国际高端船舶市场,既是机遇,也是挑战。在交流碰撞中应吸纳国外先进理念为已所用,丰富减摇装置的功能,跟上时代发展的步伐成为减摇领域的引领者。
