扭矩测量及其校准系统的PLC 实现
2022-08-17刘建良宋忆波林杰俊赵鼎鼎
刘建良,宋忆波,林杰俊,赵鼎鼎
(1. 海军装备部驻广州地区军事代表局,广州 510220;2. 上海船舶设备研究所,上海 200031)
0 引言
随着科学技术的不断进步,在各种动力驱动设备,如车辆船舶、医疗器械和航天航空等行业中,都广泛的运用到了扭矩测量系统和扭矩测量原位校准系统[1-2]。近年来,机械传动系统的发展越来越长远和完善。其中,扭矩是机械传动系统中的非常重要参数,本文将针对扭矩及测量其校准系统进行分析研究[3-4]。
在某机构中,其动力系统系统由驱动组合和非驱动组合两部分构成,由于这些关键部件的性能直接影响此机构的正常使用和准确性。因此在研制过程中需要用专用测试设备对此组合的扭矩进行精确测试,以考核其是否符合设计要求。
对某机构的驱动组合与非驱动组合进行扭矩测量及校准技术研究,并建立相应的专用扭矩测量及原位校准装置。运用参考式扭矩校准装置的基本原理对整体机构进行设计,对装置的重要组成部分和采用的主要技术及其实现方法予以研究。
1 专用扭矩测量系统
专用扭矩测量系统的基本工作原理见图1。被测的某机构组合安装在高低温试验箱中,扭矩加载系统通过挠性联轴器与传动轴给专用扭矩测量系统加载,测量系统采用经PID控制的扭矩负载系统给置于高低温试验箱内部的驱动组合加载。转矩转速传感器在高低温试验箱外部检测驱动组合的输出扭矩和输出转速,并将结果传输给工控机,为软件计算某机构驱动组合的传动效率提供数据,进而测试出驱动组合在一定工作电压的情况下,不同负载所对应的工作效率曲线,从而对驱动组合的性能加以考核。
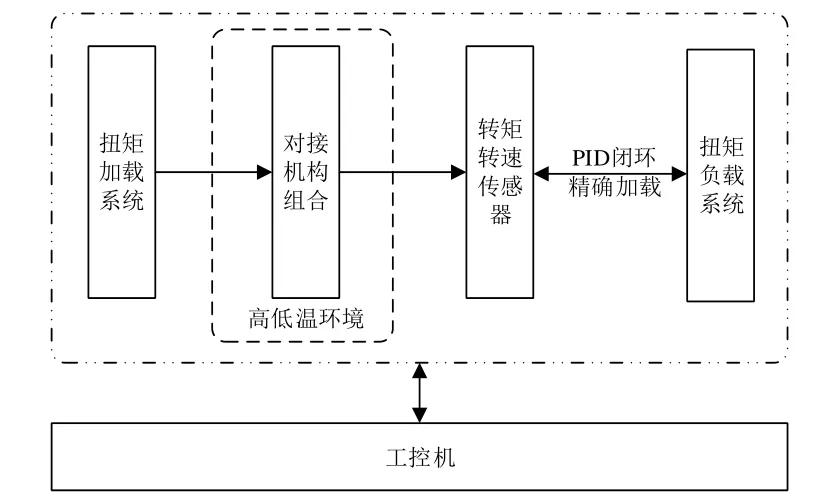
图1 测量系统的工作原理
1.1 测控系统的构成
驱动组合专用扭矩测量系统控制系统是将测量和控制融合的典型测控系统。系统采用PID控制的电动制动器提供稳定的输出轴负载扭矩,转矩转速传感器在高低温试验箱外部检测驱动组合的输出扭矩和输出转速,并将结果传输给工控机,为软件计算某机构驱动组合的传动效率提供数据,进而测试出主驱动组合在一定工作电压的情况下,不同负载所对应的工作效率曲线,从而对驱动组合的性能加以考核。
非驱动组合专用扭矩测量系统控制系统是将测量和控制融合的典型测控系统。系统采用PID控制的电动制动器提供稳定的输出轴负载扭矩,而输入轴的伺服电机提供恒定的转速,带动非驱动组合专用扭矩测量系统一起运转,由转矩转速传感器检测组合上产生的扭矩,并将扭矩和转速信号提供给工控机,同时软件以其作为判断电机到位停止的条件,并实时记录测试数据,由输出端扭矩和输入端扭矩,即可得到组合的扭矩传递效率。测试过程中,控制系统设置到位指示、力矩过大报警、电机紧急停车等安全和防护措施。
根据信号和数据的先后将其划分为图2所示的3个部分。

图2 驱动组合专用扭矩测量系统组成图
前端传感器检测部分将扭矩-速度传感器信号传输给下游的数据采集和磁粉制动器控制部分;数据采集和控制完成传感器信号的同步数据采集,同时控制磁粉制动器按设定参数运行;采集的数据通过硬盘写流实时记录,并对记录的数据进行计算分析,得出效率,并且可以将所需的历史数据打印成报告。
1.2 主电路构成
驱动组合专用扭矩测量系统的主电路系统分别由直流供电部分和交流供电部分2部分组成,其主电路的系统框图见图3。
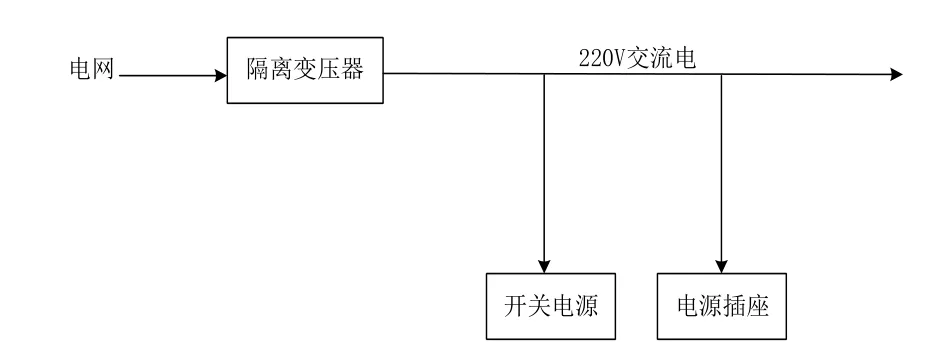
图3 驱动组合专用扭矩测量系统主电路系统框图
直流供电电路是将220 V交流电经开关电源整流为PLC和各类传感器所需的直流电压;交流供电部分是将220 V交流电通过插座电源引出,供需要插座供电的设备使用。
非驱动组合专用扭矩测量系统的主电路系统包括伺服系统供电电路、直流供电电路和交流供电电路3部分。主电路系统框图见图4。

图4 非驱动组合专用扭矩测量系统主电路系统框图
伺服供电电路从电网获取380 V交流电,经隔离变压器转化为220 V交流电后为主电机的伺服控制模块供电;直流供电电路是将220 V交流电经开关电源整流为PLC和各类传感器所需的直流电压;交流供电部分是将220 V交流电通过插座电源引出,供需要插座供电的设备使用。
2 扭矩测量原位校准系统
电动制动器输出扭矩的稳定性将直接影响,扭矩测量系统的精度,本项目中拟采用磁粉制动器或伺服电机与减速器组合形成的负载模块作为扭矩测量系统的负载端。采用PID控制的电动制动器提供稳定的输出轴负载扭矩,而输入轴的伺服电机提供恒定的转速,带动差动组合一起运转,由转矩转速传感器检测差动组合上产生的扭矩,并将扭矩和转速信号提供给工控机,同时软件以其作为判断电机到位停止的条件,并实时记录测试数据,由输出端扭矩和输入端扭矩,即可得到差动组合的扭矩传递效率。测试过程中,控制系统设置到位指示、力矩过大报警和电机紧急停车等安全和防护措施。
扭矩测量原位校准系统的基本工作原理见图5。扭矩加载系统通过挠性联轴器与传动轴给扭矩测量原位校准系统加载,传动轴穿过高低温试验箱经由被测件与测量转矩转速传感器连接,将一个标准转矩转速传感器串入测量转矩转速传感器和扭矩负载系统之间,并且把测量传感器和扭矩负载系统通过挠性联轴器与标准转转矩速传感器连接起来。原位校准系统采用经PID控制的扭矩负载系统以实现扭矩的精确加载,通过对比标准转矩转速传感器和需校准的转矩转速传感器测得的扭矩值,实现专用扭矩测量系统的测量转矩转速传感器的校准。本项目提出了一种PID控制扭矩制动器的精确加载的方法,采用数字PID位置式控制算法,对开展的某机构关键部件的扭矩特性测试中电动扭矩精确加载方法进行研究。

图5 原位校准系统的工作原理
针对驱动组合专用扭矩测量系统,这类本身不带伺服电机的测量系统,串入一个标准转矩转速传感器,并通过联轴器分别与测量传感器和电动制动器相连。由被测驱动组合输出扭矩,通过比对标准转矩转速传感器和需校准的转矩转速传感器测得的扭矩值进行原位校准。
针对非驱动组合专用扭矩测量系统,这类本身带有伺服电机的测量系统,在非驱动组合测量系统原位校准中需要校准的转矩转速传感器有4个,但为了降低成本,同时考虑到校准的效率,故采用2个标准转矩转速传感器进行校准,先对测量系统中的2个转矩转速传感器进行校准,之后,对另外2个转矩转速传感器进行校准。标准转矩转速传感器通过联轴器分别与需校准的转矩转速传感器和电动制动器进行连接。由扭矩精确加载系统施加扭矩,通过比对标准转矩转速传感器和需校准的转矩转速传感器测得的扭矩值进行校准。
3 三菱PLC 实现PID 控制方法
电动扭矩精确加载系统工作原理如下:计算机设定扭矩值,通过PID控制信号模块后,得到输出相应扭矩值的数字量,然后控制D/A模块输出相对应的模拟量,从而控制稳流电源模块输出相对应的电流控制电动制动器输出扭矩,电动制动器输出的扭矩通过传动轴将扭矩传递到输出转矩转速传感器,输出转矩转速传感器输出的信号通过A/D转换后,输入到PID控制器中,计算出电动制动器输出的实际扭矩与设定值之间的差值,将差值作为下一次的扭矩设定值输出入到计算机中,系统重复执行PID闭环控制指令,直至电动制动器输出的扭矩精度达到0.5%以下,从而实现电动扭矩的精确加载。
求出扭矩实际值与设定值之间的偏差,然后对求得其通过PID运算,从而得出控制器输出量,控制器输出量通过D/A模块、稳流电源转换成加载电流值,最后精确控制电动制动器的加载电流值,实现对扭矩精确加载,见图6。

图6 旋转稳态下PID 控制电动制动器精确加载扭矩系统
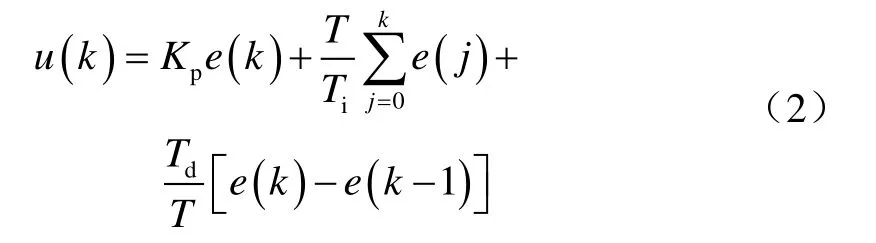
根据自动控制原理可知,偏差信号e(k)为设定扭矩值SP(k)与转矩转速传感器信号PV(k)的差值,u(k)为控制器输出量,N(t)为实际加载扭矩值,Kp、Ti、Td分别为PID控制系统的比例系数、积分时间常数、微分时间常数,表达式为

离散化处理模拟的PID控制算法,可得表达式为
在如今的工业生产中,通常控制连续模拟变量是在连续变化的。由于使用PID控制器可以不必使用非常精确的控制系统数学模型,而且它们非常灵活,适应性强,因此得到广泛的应用。增量式PID控制算法可以输出每个输出的控制量,通过逻辑判断限制误输出,得到减少机器故障对系统产生的影响。
针对这些问题的出现,本项目使用三菱PLC来实现模拟量的PID控制[5-6]。
本项目提出的PID控制系统中,比例环节能够成比例的缩小设定扭矩值与转矩转速传感器测量值的扭矩偏差,只要产生了偏差,控制器就应该立即作用来进行调节,从而改变电动制动器的电流值,达到降低系统扭矩偏差的效果[7];积分环节不断累加偏差信号来接近设定值;微分环节显示了偏差信号的变化方向,为了防止偏差量太大,要及时的在系统中加入合适的修正量,可以缩短系统的调节时间,提高响应速度[8-10]。
图7为PLC控制的系统结构框图。并可以使用以下几种方法来实现。
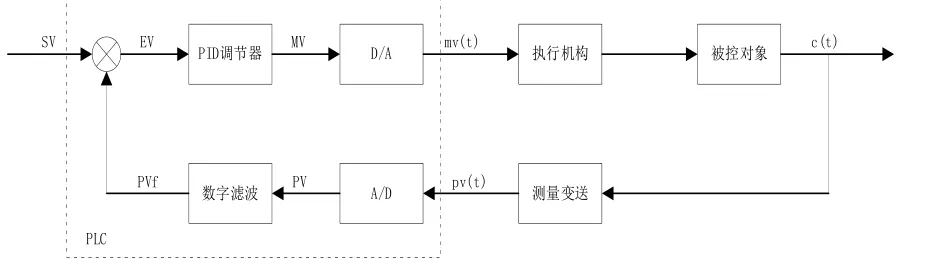
图7 PLC 对模拟量实行PID 控制的系统结构框图
1)使用PID过程控制模块。这种类型的模块是由PLC制造商开发的,用户只需要改变和设置一些参数就可以使用,可以将PID控制程序存储在模块中,这样操作起来比较方便,一个模块可以控制许多控制回路[11-12]。
2)使用PID功能指令。有的PLC具有PID控制的功能指令,它们可以看作子程序来实现PID 的控制,将A/D与D/A模块一起使用,能达到与PID过程控制模块相似的效果。
3)使用自编程序实现PID闭环控制。由于用户对PID控制算法的不同需求,用户可以编写自己需要的PID控制程序[13-14]。
PID控制是基于“动作方向”设置的正或负PID操作,PID公式为
式(3)~式(7)中:ΔMV为2次采样时PID输出量的差值;MVn为本次的PID输出量,EVn和EVn-1分别为本次与上一次采样时的误差;SV为设定值;PVn、PVnf-1和PVnf-2分别为本次、前一次和前两次滤波后的反馈值;L为惯性数字滤波的系数;Dn和Dn-1分别为本次和上一次采样时的微分部分;Kp为比例增益;Ts为采样周期;Ti为积分时间和Td为微分时间;ɑd为不完全微分的滤波时间常数与Td的比值。
对以上的理论分析做出如图8对电机PID仿真的MATLAB/Simukink模型。

图8 电机PID 仿真Simulink 模型
3.1 硬件模块
驱动系统选用三菱FX5U系列PLC作为主控单元,其组态配置见图9。

图9 PLC 组态配置图
非驱动系统选用三菱FX5U系列PLC作为伺服系统的主控单元,其组态配置见图10。

图10 PLC 组态配置图
3.2 软件模块
扭矩测量系统软件采用LabVIEW进行开发,操作界面简单直观,测试参数设定方便快捷[15]。
测控系统软件按要求需实现以下功能:
1)测量功能。转速转矩。
2)自检功能。测量前可分别 对伺服电机、磁粉制动器及各传感器模块进行自检。
3)参数设置。安装完成后,只需设定采样频率、转速等参数,即可自动完成测量。
4)实时显示功能。测量过程中,界面实时显示各传感器测量曲线。
5)数据处理与分析功能。利用测量数据进行数据的处理与计算,计算出传动效率。
6)数据存储功能。测量过程中,将采集的原始试验数据以指定格式实时存储至指定位置。
整体设计采用模块化的设计思路,遵循模块独立原则并设置安全保护功能见图11。
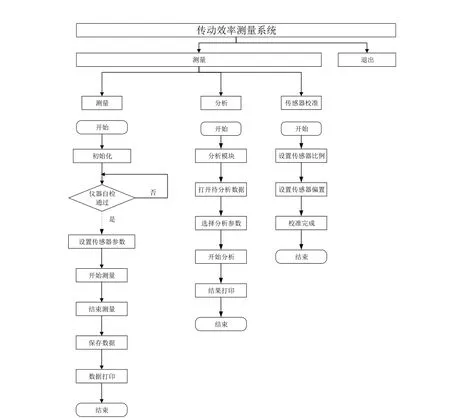
图11 扭矩测量系统软件流程图
运行软件之后,自动对扭矩测量系统硬件进行初始化,完成初始化后需要通过仪器自检程序。测量前可分别对伺服电机、磁粉制动器及各传感器模块进行自检,若仪器无故障便可进入测量功能,否则回到初始化后的状态,待查出仪器故障并将其排除后才能进入测量功能。
在测量功能中需要先进行传感器参数(设定转矩转速传感器比例和设定转矩转速传感器偏置)的设置,以确保能够通过转矩转速传感器参数得到较好的校准效果。输入正确参数之后,可进入测量项目的选择,待磁粉制动器和传感器等设备通讯正常,在测量界面输入控制参数(设置转速和采样率)则可运行动态测量, 并利用测量数据进行数据的处理与计算,计算出传动效率。在运行完指定的次数之后,电机自动停止,等待数据存储、打印或下一次测量[16-17]。
4 结论
本文围绕某机构中的驱动组合与非驱动组合的专用测量系统及扭矩测量原位校准系统进行相应的研究,首先分析了专用扭矩测量系统的基本工作原理及其测控系统在驱动组合与非驱动组合的构成;其次分析了扭矩测量原位校准系统的基本工作原理,提供了一种PID控制扭矩制动器精确加载的方法,采用数字PID位置式的控制方法,对扭矩特性测试中的电动扭矩精确加载方法进行研究;最后,对PLC实现其中PID控制模块的实现方法进行了分析介绍。
