一种基于现有车辆限位系统的智能改造设计1
2022-08-17罗文祥黄远翔钟利明彭建兴
罗文祥 黄远翔 钟利明 彭建兴 卢 尧
(贵州师范大学机械与电气工程学院,贵州省贵阳市 550000)
0 引言
我国为防止大型运输车辆进入市区影响正常交通秩序,在一些特殊地段、道路会根据《中华人民共和国公路法》设置车辆限位装置[1],但车辆限位装置的设置引起了许多可避免的交通事故,造成了不必要的人员伤亡和财产损失。
近年来,我国各地多次出现消防车、救护车无法通过限位装置而没能及时进行救援,造成人员伤亡和财产损失。为了加强道路安全,提高限位装置的可行性,目前有许多对传统限位装置的改进设计。在陈卓团队的《基于道路限高杆的设计要点与应用》[2]中,设计了一种可根据安装地点和不同时间段进行高度调整的限高杆,可以更加合理地对大型车辆进行拦截,但该设计中的限高杆是非自动的,需要人工进行高度调节。此外,在史菲帆团队的《智能限高系统级限高架设计》[3]中,设计了一款基于超声波测距、树莓派OpenCV车牌识别的智能限高系统,可对来往车辆进行高度测量,若车辆超高,限高杆发出警报、升高让其通行,并且记录超高车辆车牌,进行违规处理。该设计可以有效地防止车辆与限高杆发生碰撞,并且可以很好得对违规车辆进行记录,但是运用的超声波测距模块方向性差、发散角度大、分辨率低,可能会误将邻车道的车辆或路边的物体作为测量目标,发生误判断;所运用的树莓派是一种核心数据闭源的嵌入式开发板,无法用于硬件的开发;并且OpenCV进行图像处理后所得车牌信息进行模板匹配的准确率不足。对现有的限位装置的改进设计的学习总结,我们采用基于卷积神经网络[4]的车牌识别,设计了一种针对救援车辆可正常通行的限位装置,可以提高对车牌识别的准确率,实现自动化。
此外,近年来全国各地多次发生在夜间或天气恶劣情况下,司机没注意限位装置而发生交通事故。为避免车辆与限位装置碰撞事故发生,目前有许多限位装置添加了防撞警报装置,而大多数的装置是基于超声波测距[5]、红外线测距[6],对来往车辆进行距离、高度测量,可以对部分超高车辆进行警示,但这些技术仍然存在有较大弊端。为提高车辆测量的精确度,我们采用了调频连续波雷达测距[7]方式,能更加准确地对来往车辆进行距离实时监测。在夜间或雨天、雾天等恶劣天气及驾驶员疲劳的情况下,动态测量前方车辆相对距离和速度等信息,在危及安全的情况下向驾驶员发出声光警报,提醒驾驶员注意限高装置。
1 车辆限位系统的结构设计
本作品的设计模型如图1所示,主要分为三个部分,分别为限高杆1、限高杆侧柱2、装夹柱3。其中齿轮传动机构带动限高杆侧柱运动,装夹柱由外壳和载板组成[8]。
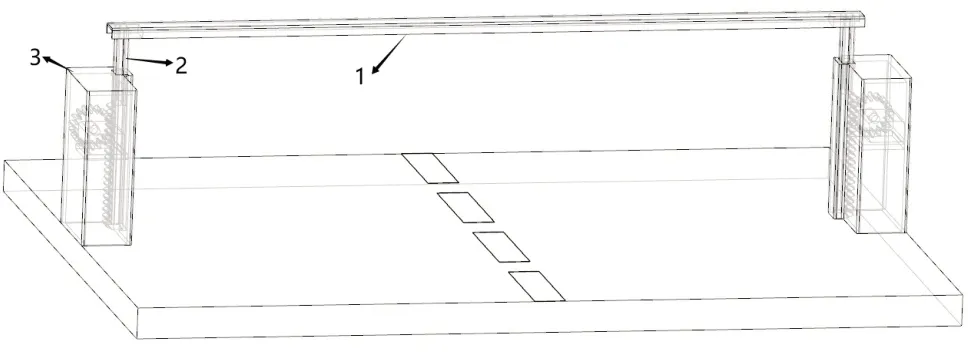
图1 智能限位系统3D模型图
1.1 限高杆
限高杆与限高杆侧柱连接,是限位装置中用于限制超高车辆通行的结构。
1.2 限高杆侧柱
限高杆侧柱是限位装置中重要的传动装置,由长直条4与直齿条5结合构成,直齿条与齿轮传动机构相连;电机6与齿轮7相契合,齿轮与直齿条相契合,达到电机带动齿轮转动,齿轮带动直齿条纵向运动,从而使限高杆上升或下降,如图2所示。
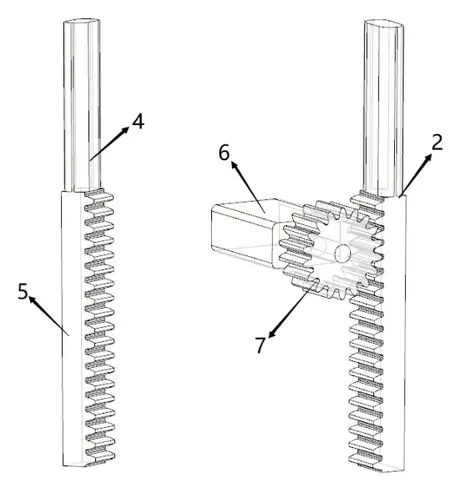
图2 限高杆侧柱及传动装置
1.3 装夹柱
装夹柱由外壳8和载板9组成,外壳8采用立体棱柱式结构,内部设有槽口安装限高杆侧柱,限制其空间上的运动;直齿条无法脱离装夹柱,这样设计是为了让限高杆侧柱与外壳达到封闭最大化,可以有效地防止道路上的粉尘、石子掉入内部;载板9用于固定电动机,设有接线孔,便于接线,如图3所示。
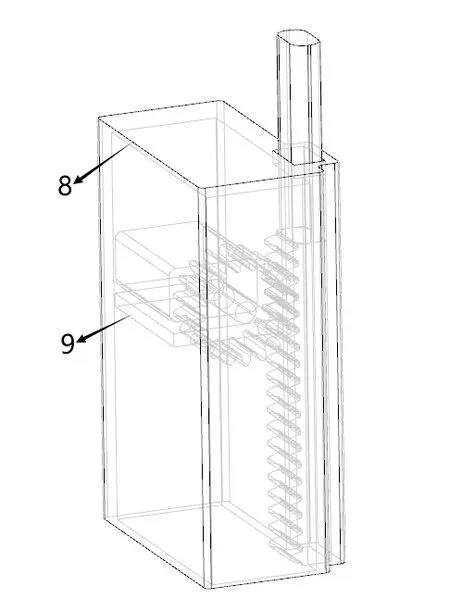
图3 装卡柱内部机构
2 车牌识别的设计
2.1 现有车牌识别方式比较
现有车牌识别方式:基于传统OpenCV的车牌识别、基于MATLAB的车牌识别等,经资料查询及数据分析,我们采用了基于卷积神经网络LeNet-5[9]的车牌识别。卷积神经网络类似于生物神经网络的权值共享结构,可产生生物视觉中局部感受野效应,降低网络的模型复杂度、减少了权值数量,对图像平移、比例缩放等具有不变性,可减少由于车辆角度、外形造成的影响。相比于其他识别方式,该技术不仅可以提升对车牌的识别率,还可以缩短识别时间,如图4所示。

图4 基于卷积神经网络LeNet-5的车牌识别
2.2 车牌识别的工作流程设计
我们先提取限位装置所在地区的医院、消防站等救援车辆车牌信息,并提前录入系统,作为匹配模板。当来往车辆靠近限位装置时,摄像头会对车辆的车牌进行捕捉,提取出车牌字符再与数据集中数据进行比对,输出相应车牌信息,再将车牌信息与系统提取录入的车牌模板进行匹配,若匹配成功限高杆则会升高,车辆即可通行,反之车辆不可通行。工作流程如图5所示。
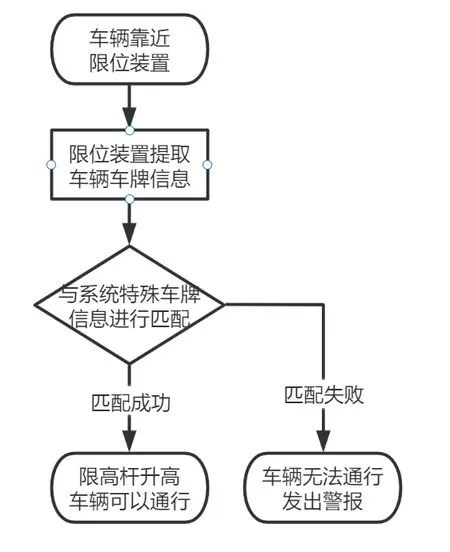
图5 限位装置车牌识别工作流程
3 防撞报警装置的设计
3.1 现有测量方式比较
现有测距方式有超声波测距、红外线测距、调频连续波雷达测距等,通过查询资料,调频连续波测距方式相对于其他三种方式更具优越性,测量距离更远,并且能在恶劣天气条件下工作,有较高的稳定性,因此我们采用调频连续波测距方式。
3.2 调频连续波雷达(FMCW雷达)的原理与防撞报警装置的设计
FMCW雷达的基本原理是通过输入模块发送端发射周期性的频率调制信号,然后对反射回来的信号进行处理,得到所需要的距离和速度等数据[10][11]。利用该原理,我们设计了防撞报警装置,在夜间及恶劣环境下启动,FMCW雷达对来往车辆进行距离与车辆高度的测量,待来往车辆靠近至一定距离时,报警装置会亮警示灯,让司机注意限位装置。若车辆高度超过安全高度,装置会发出警报,提醒司机超高无法通过。
4 技术特点与优势
4.1 特点
运用了车牌识别的限位系统,能够自主的对来往车辆进行车牌信息的提取和比对,不仅实现了对大型车辆的限制,还可以使消防车、救护车等特殊车辆正常通行。防撞报警装置能够在夜间及恶劣环境下提醒经过车辆此处设有车辆限位装置,降低事故发生的可能性。
4.2 优势
a、在传统的限位装置的基础上,我们的设计使限位装置具有自主的车牌识别能力,能够识别车辆车牌,并且能够对限位杆的高度进行自动调整,让指定的特殊救援车辆通行;
b、相比于基于传统OpenCV的车牌识别,我们采用的基于卷积神经网络的车牌识别不仅可以提升识别的准确率,还可以缩短识别时间,为大型救援车辆的通行提供显著帮助;
c、相比于现有的大部分限位装置,我们的设计增加了基于FMCW雷达的防撞报警装置,增加了超高提醒功能,在夜间及恶劣环境下能更加有效地提醒司机注意限位装置。
5 结束语
本文对现有车辆限位系统的进行了智能设计改造,通过车牌识别、FMCW雷达检测、限高杆自动化调整等技术,完成对大型车辆的限位,又不会影响特殊车辆的通行。车牌识别设备可对消防车、救护车等指定车辆的车牌信息进行提取、识别,然后控制限高杆调整高度,特殊车辆即可正常通行,待其通过后,限高限宽装置恢复原状。此外,增加的防撞报警装置,能够在夜晚及恶劣天气对通过的车辆起到提醒作用,增加安全度。该设计相比于传统的限位装置更加能体现出“以人为本”的思想,体现对广大群众生命安全的重视。
