基于模糊PID的麦冬干燥箱温度控制系统设计
2022-08-15刘桂杉1明1
0 引言
麦冬Ophiopogon japonicas(L.f.)Ker-Gawl.为百合科(LiLiliaceae)植物麦冬的干燥块根
。麦冬性微寒、味甘、微苦、热经,能养阴生津、润肺清心,用于治疗肺燥干咳、津伤口渴、心烦失眠、肠燥便秘等
,是一种名贵中药材,深受广大消费者喜爱。但由于麦冬具有明显的季节性和地域性,收获季节为春雨季。刚出土的麦冬很难储存,鲜麦冬的表皮极易破损黏连,腐烂霉变。药材产地干燥加工是中药材生产和品质形成的重要环节
,传统的自然晾晒方式干燥时间长,容易被蚊蝇污染,易发生霉变,无法保证产品品质,很难适应现代化生产发展的需求。随着中药市场的逐步扩大,药材的干燥加工日趋高效,多种干燥设备应用到药材产地干燥过程中。在麦冬人工干燥过程中,温度控制是保证麦冬干燥工艺及控制麦冬品质的关键指标。
先行者一号作为首款中国移动5G试验产品,还将点亮更广泛的5G行业应用场景,如车联网、无人驾驶、工业制造、远程医疗等,在社会经济生产各领域提供超高带宽、超低时延的智慧连接服务,满足海量设备实时控制需求,助力智慧中国。
红外干燥是一种简便经济、不受天气影响的干燥方法。林冰等
人采用阴干、恒温干燥(40 ℃、50 ℃、60 ℃、70 ℃、80 ℃)和程序变温干燥[40 ℃(3 h)→50 ℃(2 h)→60 ℃(2 h)→70 ℃(2 h)→80 ℃(2 h)→60 ℃(2 h)→40 ℃(2 h)]3种方式分别对麦冬进行干燥处理,结果表明,利用程序变温干燥得到的麦冬有效成分最多。
麦冬红外干燥箱中控制系统采用多段式温度控制,最常见的温度控制方法就是常规PID控制,该方法虽然控制结构简单、操作方便且便于实现,但红外干燥箱内部温度分布不均匀,是一个非线性、时变、大滞后与多变量耦合的复杂系统,采用参数固定的常规PID温控系统。很难建立精确的数学模型,所以参数整定比较困难。或者即使整定出一组相对比较理想的参数,但当控制对象发生较小改变时,都很难保证其控制的稳定性。
模糊控制是目前成熟的智能控制方法,其采用模糊逻辑把人的控制经验归纳为定性描述的一组条件语言,利用模糊集理论,将其定量化,使控制器模仿人的操作策略。模糊控制具有很强的鲁棒性和稳定性,大量理论研究和实践证明,模糊控制理论是温度控制系统中一种常用的方法策略。
1 干燥箱温度控制系统
1.1 硬件组成
式(1)中,
(
)为PID控制器输出;
(
)为给定值与被控对象输出的偏差,作为输入送往PID控制器;
为控制器的比例系数;
为控制器的积分时间常数;
为控制器的微分时间常数。
1.2 PID控制原理
PID控制系统由PID控制器和被控对象组成,初始时刻系统给定输入
(
),得到一个系统输出
(
),然后经过反馈后得到偏差
(
),经过比例、积分和微分等环节的处理,再进行线性相加得到控制量,实现对被控对象的控制。其控制规律为
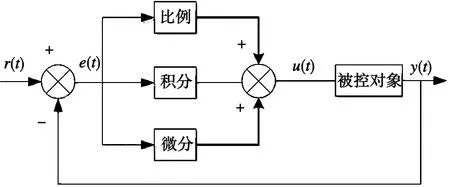
PID控制器具有结构简单、可靠性高和适用范围广等优点,已成为目前工业控制系统中应用最常见的控制器,常规PID控制器原理框图如图2所示。

(1)
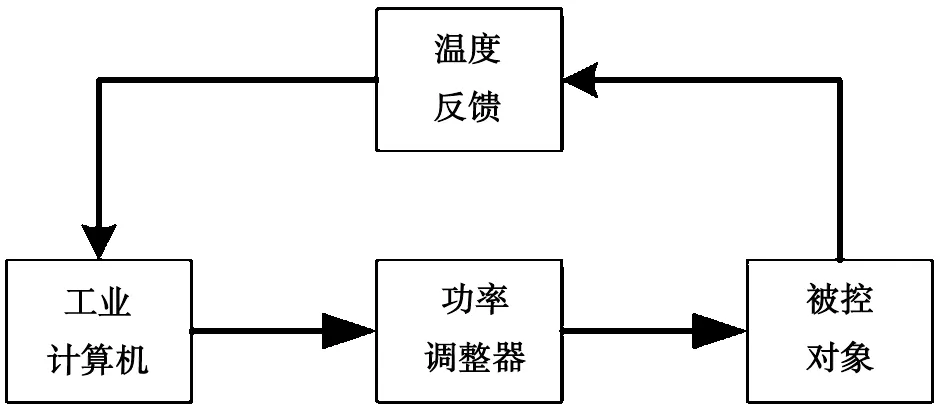
本文中设计的模糊PID控制系统硬件部分主要由工业计算机、功率调整器及干燥箱等组合而成,其硬件组成框图如图1所示。
在PID控制系统中,主要从响应速度、稳定性、超调量及稳态误差几方面来评价系统控制性能的优劣,在PID控制器中各校正环节的作用如下。
比例环节:成比例地反应控制系统的偏差信号
(
),偏差一旦产生,控制器立即产生控制作用,以减小偏差。比例越大系统反应越快。
积分环节:主要用于消除静差,提高系统的无差度(即误差减少)。积分作用的强弱取决于积分时间常数
,
越小,积分作用越强,反之则越弱。但积分时间太小容易引起系统振荡。
微分环节:反应偏差信号的变化趋势(即变化速率),能在偏差信号变得太大之前,引入有效的早期修正信号,从而加快系统的动作速度,减少调节时间。微分时间越大,作用越强(即产生一定的抑制作用)。
对于现代工业控制系统中,要求具有更快速、更精确、更稳定的控制过程,常规的PID表现出一定的局限性,主要体现在:
鼓励学生积极将实训课题与院系的创新科研相结合,利用现有条件在完成实训作业的同时参加各项物联网工程的相关专业比赛,如各级机器人大赛,蓝桥杯、ACM等程序设计比赛。培养学生的创新思维、动手实践能力与团队协作能力。
1)需要已知系统精确的数学模型,即被控对象是固定的,不变化的。常规PID控制系统没有自适应能力,在面对时变、不确定的系统时难以达到理想的控制效果;
2)PID控制器整定好的控制参数只适用于非线性对象的某一阶段,对其他阶段的控制对象难以取得理想效果。
为方便软件使用,提供了功能块与结构体,在使用温度控制库的过程中,至少存在一个实体,至少创建一个FB_TempController功能块和一个ST_ControlParameter结构体,并定义功能块相关外部链接,FB_TempController功能块如图5所示。
1.3 模糊PID控制器设计
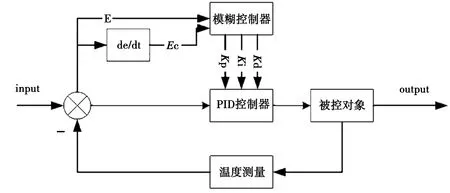
模糊PID控制的本质是在常规PID的基础上,利用模糊逻辑并根据一定的模糊规则对PID的参数进行实时优化,以克服传统PID控制器无法实时调整PID参数的不足,模糊PID控制器如图3所示。
严跃进认为,严格来说,房产税按套内面积征收引发民怨较小。从更长远的观点看,未来要建设开放式街区小区环境,公共通道部分该如何征税,会否增加公摊面积,如何缓解社会矛盾,都值得深思。
交叉切割后的试验区用胶粘带粘过后,对漆膜脱落面积进行计算,计算出的数值作为评定结果的参考数据。试验结果的分级标准见表1。[1]
在现代工业控制系统中,由于系统模型参数变化或者是模型结构的变化,造成名目繁多的不确定性,使得PID控制器原整定参数无法保证系统继续良好地运行,这就要求PID控制器随着系统模型的变化具有在线修正参数的功能。
老板娘一边说,一边朝门外瞅,见没有人经过,她才放低声音神神秘秘地说:“听说那天载去的一车人,有的人穿着制服,有的穿的便衣,他们每个人身上都带着家伙,听说有的手里拿着警棍。有的人腰上还别着枪哩。 很多人见势不对,就赶紧走了,只有周二这个人一根筋,他一个人还在那儿理直气壮地较着劲,结果派出所的人就把他抓起来了。”

系统中的温度传感器会实时采集干燥箱内的温度,控制系统经过计算得到当前值与设定值的偏差
及与上次偏差的变化
两个值,通过模糊理论建立比例因子
、积分因子
、微分因子
与系统偏差
与偏差变化率
之间的关系
=
′
+
(
,
)=
′
+△
(2)
=
′
+
(
,
)=
′
+△
(3)
=
′
+
(
,
)=
′
+△
(4)
其实现的具体过程是:当系统出现偏差时,将偏差与偏差变化率转化为模糊变量,通过建立的模糊规则选择合适的输出,经解模糊后,送往PID控制器,此时PID控制器的三个参数得到修正,系统对修正后的比例、积分、微分进行控制,直到无偏差。
1.4 参数自整定
自整定算法是基于传统的曲线切线法。该方法最初由Ziegler和Nichols创立。其假设被测对象是一个具有延时特性的线性P-TI回路,最大变化率由阶跃响应实验值确定。
2 控制系统实现
这种情况下,西王方面紧急行动,首先是用摒弃前嫌请来了落跑外援劳森,然后用“小詹姆斯”桑普森临时替换莫泰;针对本土球员战斗力不强的弱点,吴庆龙请来了自己的老搭档、辽宁老乡接君……
江苏镇江是中原逃难官员、百姓的聚散之地,那里迁入了不少从中原南下的士庶,今日犹有案可稽。如高桂为丹徒人,曾任高邮知州,祖籍为开封,建炎南渡时,他随逃难人群渡江,寓居京口(镇江);丹阳(今镇江)先世居河南洛阳,尹焞随宋室南渡,徙居浙江绍兴,是为尹氏南迁始祖。传四世至尹国宁,由浙东再迁镇江府丹阳黄连庄,是为丹阳尹氏始祖。”
在工程应用中,用PLC或工控机组成硬件部分,通过构造具有自整定功能的模糊PID控制器,通过一按键或者简单参数设置,就可由控制器自身来完成参数的整定,不需要人工干预。运用自整定的方法与人工整定相比,无论在时间节省方面还是控制精度上都得以大幅提高,增进了经济效益。
模糊控制包括模糊化、确定模糊规则、解模糊等组成部分,如图4所示。
本文介绍Beckhoff公司针对PC开发的软件开发平台TwinCAT3,内部集成温度控制器包含自整定算法功能块(FB_selftuner)、控制算法功能块(FB_ControlAlgorithm)、设定值发生器功能块(FB_SetpointConditioner)、控制值发生器功能块(FB_ControlValueConditioner)、报警功能块(FB_Alarming),用户不需要专门的编程工具就能实现温度模糊控制单元编程、知识库建立等。
值得注意的是,卖房求生的*ST大唐同时还在卖股权。11月27日,*ST大唐披露称,公司正在筹划将所持成都线缆46.478%的股权转让给烽火通信,此次交易如果能够年内完成,将进一步减轻*ST大唐的暂停上市压力。
2.1 软件功能块
然而,在红外干燥箱的被控对象具有大惯性、大时滞、时变等特点的非线性系统。因此,需要引进更加智能和先进的控制来弥补常规PID的缺陷,提高控制系统的性能。
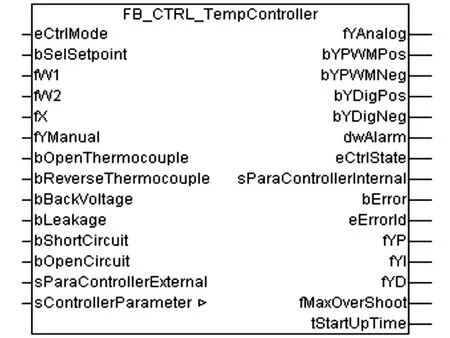
从FB_TempController功能块可以看出,该功能块支持1路输入、2路输出(1路模拟量、1路PWM输出)的模糊运算,参数设置主要由sControlParameter数据引脚完成。在程序中采用ST文本编程调用FB_TempController功能块如图6所示。
营地处于郊外,环境非常好,令人惊喜的是,还经常会有蜘蛛、兔子和狐狸来拜访我们。入营当晚,我们就认识了许多外国朋友,有西班牙的,也有波兰的,还有德国、法国、意大利、俄罗斯的……因为我们是为数不多的中国人,他们对我们都很好奇,围着我们谈论了许多话题。与他们交往的过程中,我们不光提升了自己的英语能力,也了解了不少各国人文风情,更收获了一份友谊。这就是我游学最重要的目的:在这里,我有了很多和外国人交流的机会,也让自己的英语得到了很好的锻炼。

由fbTempController.fYAnalog获得的经运算后的输出控制量,经EL4024模拟量输出模块输出,作为功率调整期的输入信号,实现对温度的加热。
2.2 控制器参数结构体
控制器参数结构体(ST_ControllerParameter)中设置加热模式、升温速率、最高温度等相关参数。
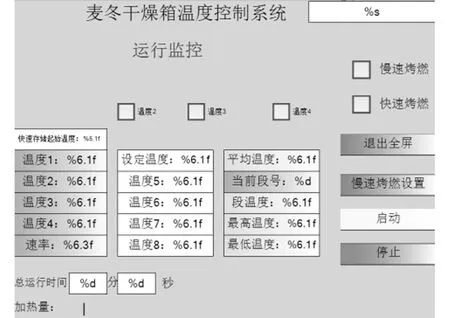
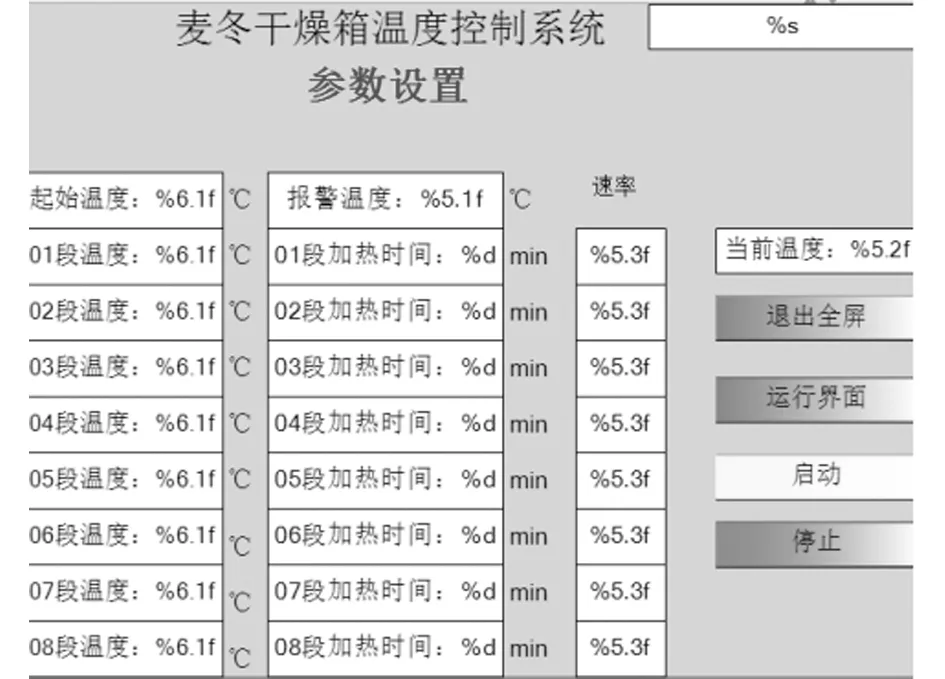
2.3 升温方式
本系统中,根据麦冬干燥过程的工艺参数需求,在不同阶段选择不同的升温速率进行加热,系统设置了8段式加温,即先加热到一个温度并保温一段时间,然后再加热到第二个温度。或者无需保温,直接加热到第二个温度,如此往下设置参数。其运行界面及参数设置界面分别如图7、图8所示。
此功能可通过将ST_ControllerParameter结构体中的bEnableSoftStart置为true实现,恒温时间通过tStartUp进行设置。如需控制温度上升速度,可将bEnableRamping与bStartUpRamping也置为true,并通过fWStartUpVeloPos、fWStartUpVeloNeg、fWVeloPos、fWVeloNeg设置斜率。需要注意的是,无论上升还是下降,斜率的参数都为正数。
2.4 输出模式
温度控制功能块提供两种形式的输出,模拟量和PWM输出。在本文中,选择模拟量输出,对EL4024输出模块,其接受的控制值范围为0~32 767。
2.5 PID参数整定
在第一次调试使用时,由于PID控制器参数为空,此时需将PID控制器模式切换为eCTRL_MODE_Tune,等待约20 s,在此期间需维持传感器温度波动不超过±1 ℃,然后程序将以fYTuneHeating值进行加热,直到达到设定温度的80%后加热停止。程序根据温升曲线自动计算出PID控制器的参数。为了保证参数计算的准确性,必须保证升温在40 ℃以上。
3 试验与结果分析
加热箱上电后,设置升温速率参数(本文以12 ℃·min
)加热,启动运行程序,模糊PID控制升温曲线如图9所示。
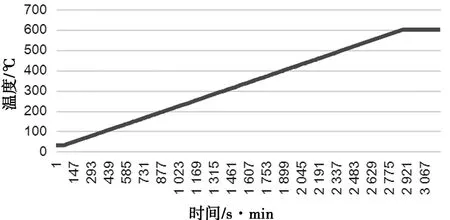
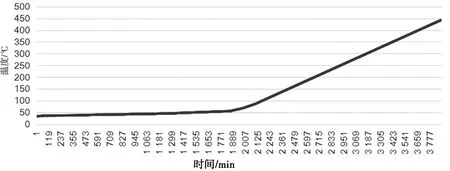
由图9可以看到,模糊PID控制调节扰动小,稳定性高。还可以根据麦冬烘干工艺要求,设置不同的升温速率,如图10为8段不同升温速率下的升温曲线图。
4 结论
通过对加热箱模糊PID控制器的设计,保证了加热箱在正常工况条件下和不同加热模型的情况下,通过自整定参数,都能稳定的使加热箱内的温度保持在一定偏差范围内,实现麦冬干燥过程中不同升温速率的要求。
[1] 国家药典委员会.中华人民共和国药典:一部[M].北京:人民出版社,2020.
[2] 王丽娟,王勇.麦冬药理作用与临床应用研究进展[J].中华医学研究杂志,2005,5(9):885-887.
[3] 谈梦霞,陈佳丽,邹立思,等.不同干燥方法对麦冬多元活性成分的影响[J].天然产物研究与开发,2019,31:100-109.
[4] 林冰,齐美娜,杨光辉.不同干燥方式对麦冬品质的影响[J].山地农业生物学报,2013,32(5):442-444.
[5] 卢勇威.模糊神经网络PID在PLC温度控制系统中的应用研究[J].科技通报,2018(1):155-158.
[6] 刘丕亮,习骏豪,李爱莲.基于模糊PID的热风炉温度控制器设计[J].科学技术创新,2021(2):69-72.
[7] 宋璐,卫亚博,冯艳平.基于模糊PID的温度控制系统的设计与仿真[J].电子设计工程,2020,28(21):51-55.
[8] 龚育林.基于模糊PID自适应整定参数的反应釜温度控制系统[J].东莞理工学院学报,2021,28(1):102-106.
[9] 韦薇薇,何同祥.基于模糊神经网络PID的复合控制策略[J].仪器仪表用户,2021,28(1):90-93.
[10] 林继.基于智能控制的PID控制方式分析[J].冶金管理,2020(12):2.
