耕整地机具耕深自动控制及电子测量技术
2022-08-15韩喜龙
0 引言
随着我国农业生产模式的转型升级,农机化生产已经成为农业生产的主流模式,有效改善了传统生产过程中的弊端,使生产效率和生产质量得到了显著提升
。耕整地机具是我国农业生产中较早应用的机械装备,是用于农田土壤翻耕、平整、起垄等工作的机械装备的总称。近年来,随着耕整地机械产品的不断升级,其在耕整设备机械结构、产品幅宽、性能等方面都得到了快速升级,有效提升了土壤的细碎、翻动、整平质量,为农业耕地的透气蓄水、杂草处理等工作创造了有利条件
。但与此同时,耕整地机具的研发对于自动控制和电气技术的应用明显不足,与播种机、收获机等设备相比,耕整地机具的自动控制往往只局限于简单的液压调控,这不利于耕整地作业质量的提升
。本文从农机自动化的角度出发,介绍了耕整地机具耕深自动控制与耕深测量技术。
长白山的维管植物共计183科638属2853种,分别占中国维管植物科、属、种总数的61.1%、18.7%和9.2%;海棠山的维管植物共计130科472属2504种,分别占中国维管植物科、属、种总数的43.2%、13.8%和8.0%;百花山的维管植物共计130科456属2604种,分别占中国维管植物科、属、种总数的43.2%、13.3%和8.4%。
1 耕整地机械特征与作业需求
1.1 机械特征与种类
我国农业生产过程中使用的耕整地机具产品种类丰富,常用的耕整地机械包括铧式犁、旋耕机、深松机、圆盘犁、圆盘耙、动力耙、联合整地机等,不同农作物和不同的栽培模式需合理选择耕整地机具的种类才能确保生产的顺利进行。总体上讲,耕整地的过程主要包括四大部分内容,一是翻耕前处理,包括灭茬、杂草处理等环节;二是翻耕,通过犁刀、旋耕刀、深松铲等将耕层土壤翻动、疏松;三是整地,主要是将耕层土壤进一步细碎,消灭过大的土块,并使耕地表面更加平整;四是起垄及镇压,对于垄作耕地,利用起垄机起垄,并将隆起土壤按规范形状压实,对于平作农田利用镇压轮、镇压板等将表层土壤压实,形成上实下虚的耕层结构。耕整地机具的作业大多需要与拖拉机进行配套(图1),需将耕整地机具与拖拉机的后悬挂系统连接安装后,由拖拉机控制耕整地的耕深和耕作模式,拖拉机出厂时的电液后悬挂控制模式能满足耕整地过程的基本要求,但要进一步提高耕整地机具作业的合理性,还应从耕整地设备的功能和自动控制出发,进一步提高耕整地质量。

1.2 作业功能需求
1.2.1 土壤翻耕细碎质量
耕地土壤的有效细碎是农业生产播种的基础保证,合理利用耕整地机具能够在作业完成后使耕地土壤形成土壤细碎程度高、表面平整、上实下虚的土壤耕层结构。要求耕整地机具作业过程需要对耕层土壤进行有效的切割、翻转,并将过大的土块破碎,避免大土块影响对播种过程的种子覆盖质量。
1.2.4 使用调整的便捷性
耕深的自动控制技术主要通过控制系统结合传感器的各项数据完成控制决策,其中速度传感器安装在拖拉机上,牵引力传感器安装于松土机构工作部位的应变片上,用于测量耕深的倾角传感器安装于耕整地机具的架体或主梁上,3种传感器将测得的数据传输到ECU芯片,ECU将数据与标准值范围进行比较,若符合标准作业参数,则不进行自动控制干预,若不符合耕深标准,则通过耕深控制装置进行调整
。
将拖拉机与耕整地机具配套安装后,若能实现耕深根据作业方案自动控制,则能有效提高作业的效率与便捷性。现阶段,大多数拖拉机对耕作状态所配套的调节模式多具有一定的弊端和不合理性,例如,后悬挂的力调节可能造成局部区域的耕深不足问题;位调节可能导致耕作过程负载过大,影响作业经济性和作业效率;浮动调节也可能造成耕作深度不足问题。因此,利用电气控制技术,对耕整地作业过程的耕作深度进行自动化控制,结合拖拉机行驶速度、耕地土壤阻力、地形变化等因素智能调整耕作深度,既能保证大面积耕地的作业品质,还能避免驾驶操作人员频繁调整机具造成的人力负担和工作效率下降问题。
由于农田耕地的环境复杂,在大面积的耕整地耕地过程中容易受到地势起伏的影响出现翻耕整地深浅不一、土壤细碎程度不一等问题,导致耕整地的整体质量降低。因此,必须通过耕整地技术的提升改善翻耕作业过程的均匀性,使同一耕地不同区域的土壤在耕整后实现品质的统一,避免出现局部区域翻耕质量不佳影响农业产量问题。
1.2.2 耕作有效深度
随着互联网的迅速发展以及实际教学的新要求,微课平台应运而生。在新课程改革下,微课显然已经成为推动教学改革、打造高效课堂的重要工具与手段。一般而言,微课程通过描述一些知识点,重点出击重难点,使学生能更好地掌握知识;另一方面,微课界面更具创新性和灵活性,这与传统教学活动形成了鲜明对比,微课能够更有效地激发学生的学习热情。本文将结合具体高中数学教学中微课的应用方法展开如下探讨。
由于耕整地机具需要与拖拉机配套使用,因此耕整地机具在与拖拉机的装配和装配后的使用及功能部件调整应满足便捷性要求,避免耕整地机具使用过程中由于调整或使用难度大影响工作效率,避免耕整地机具因功能不全或调整困难造成耕整地作业质量下降。
2 耕深自动控制的必要性
1.2.3 翻耕作业均匀性
3 耕深自动控制关键技术
3.1 耕深自动控制总体思路
现阶段,最容易实现的耕深自动控制就是在拖拉机原有的力调节、位调节功能基础上进行技术优化,利用自动控制技术将力调节与位调节的功能进行整合,设计一种力位综合控制方法。耕深自动控制应根据土壤状况和耕地实际需求选择一种主要的调节模式。例如,对于以平坦地势为主的农田,应以位调节为主,力调节为辅;对于地势不良的地区,为避免机械损伤,应以力调节为主,位调节为辅。在实际作业过程中,针对农业生产环境设定相应的控制方式和综合干预的权重界限,利用PID 控制技术对获得的传感器数据进行处理,将其转换成为与工作特性相关的控制规则,运用模糊控制去除多余的或次要的数据,实现控制过程的提速。利用控制步进电机调整后悬挂系统对耕深的控制,当实际耕深大于设定值,步进电机正转,液压力推动耕整地机具提升,耕深降低;当实际耕深小于设定值,步进电机反转,液压缸收缩,耕整地机具下降,耕深增加
。
对于联合整地机而言,其耕深的控制则更加复杂,可考虑通过两种方式实现,一是将力调节、位调节、浮动调节三种方式进行整合,实现更复杂的综合控制,以满足耕地和整地环节同时实施对于耕深和模式的不同需求;二是对联合整地机的机械结构进行适当改良,将灭茬、耕地装置的部分与拖拉机进行刚性连接,而将后部的平整、镇压装置设计成为可浮动的结构,以便于在充分保证耕作深度的同时实现地表的良好整平和压实。
3.2 耕深自动控制技术细节
耕深是耕整地机具作业的重要技术指标,有效的耕深能够为农作物根系生长创造有利条件。针对大部分农田土壤的翻耕作业而言,常规的耕作深度通常为20~25 cm,对于深松作业而言,要求深度能够打破犁底层,通常深度要大于25 cm,耕深在25~35 cm。要达到有效耕作深度,必须保证耕整地机具具有良好的入土能力,并能够利用驾驶控制耕整地机具的耕作深度,应保证耕整地机具耕作深度的合理性,过深耕作因机具负载增加耗费大量的燃料资源,过浅耕作不利于作物根系生长。
生态旅游促使了区域传统旅游形式向自然、社会和经济协同发展转变,这种重生态性、亲自然性和软文化性的旅游模式日益受到广大游客的青睐,已然成为一种全新的旅游选择取向,成为当代旅游市场中一个极为重要的增长极。中俄界江地区是指沿黑龙江与乌苏里江向两侧延伸,以当壁镇—龙王庙一线为分界,南北各属中国与俄罗斯的总面积4 380 km2多的广袤地带。该区域在地理位置上位于我国疆土的最北端与最东端,同时与俄罗斯的三大州和两大区接壤,地理位置极为重要。全面分析界江地区丰富的生态旅游资源及其分布表征是其发展生态旅游的先决条件。
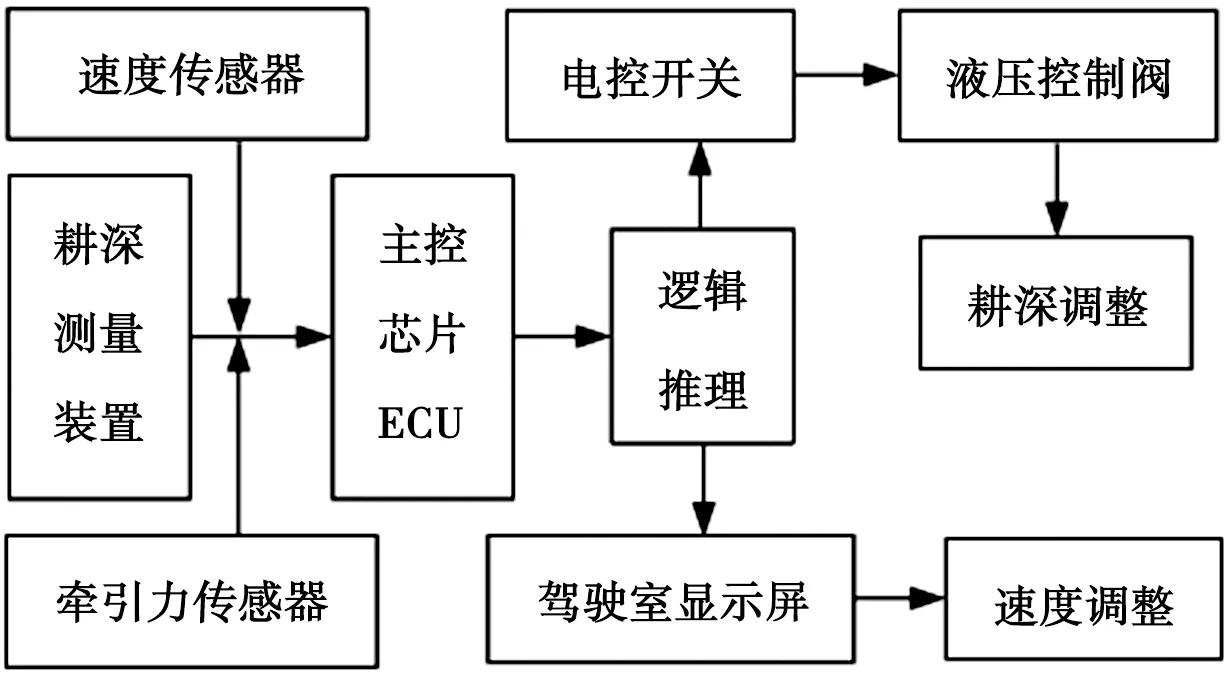
耕深自动控制的技术流程设计如图2所示,主要通过在传统的耕整地机具上增设耕深测量装置,实现对耕作深度的实时评估和测量,并结合牵引阻力传感器、速度传感器等将耕作深度、耕作阻力、行驶速度等关键数据传输到拖拉机驾驶室上增设的ECU芯片,通过ECU芯片选择适合的耕深调整模式,并同时生成新的作业方案。一方面传输到驾驶室通知驾驶员改变驾驶速度等逻辑,另一方面通过电控开关控制液压系统调整耕作深度,使耕深始终保持在合理范围。
使用的方法主要有2种:(1)等值线追踪法,被美国NOAA采用,具体原理为:由数字高程模型DEM(TIN或GRID),再通过等值线跟踪法提取潮汐基准面所对应的等值线;(2)二值法,将DEM分割成水陆二值图像,通过图像处理方法提取海岸线。分析对比优缺点,选取最适合海岸线的提取方法[1]。
4 耕深测量技术设计
耕深的测量对于耕深自动控制意义重大,现阶段,耕深的自动测量主要通过传感器技术结合处理器芯片的姿态分析来实现,通过在耕整地机具的主梁或机架上安装倾角传感器(图3),用以判断耕整地机具的作业倾斜角度,计算机系统结合倾角能够快速计算出耕整机具大体的耕深范围,然后通过几何关系验证与误差修正等方式进行测量精度的修正,实现耕深测量精度的提升
。

耕深检测所使用的传感器应选择抗干扰性强、稳定性好的倾角传感器,并具备适应农田复杂生产环境的能力,能够满足耕整地机具可能出现的作业角度变化范围,从而有效降低测量过程中的误差,倾角传感器除安装在主梁或机架位置外,还考虑安装于拖拉机与耕整地机具的连接位置,或布置多个传感器形成组网测量,以提高测量精度。
丹尼尔·平克:男人和女人的时间类型不同,尤其是在前半生。男人属于黑夜,女人属于晨曦。然而,這些性别差异在50岁左右开始消失。
除合理设计和选用传感器等硬件外,还需重视耕深检测的软件逻辑,并将耕深检测的相关数据与拖拉机驾驶室的显示屏相连接,实现耕作速度、耕作深度、牵引力状态等耕作数据的实时显示。并充分考虑拖拉机与配套耕整地机具可能出现的变化情况,能够通过软件系统实时更改配套耕整地机具的幅宽、机型种类等信息,使系统能够根据犁耕、旋耕、重耙、联合整地等不同机型自动选择适合的调整模式。
此外,耕深测量过程中的软件和硬件均需具有一定的可拓展能力。一方面可以通过软件技术的提升优化耕深测量的运算逻辑和精确性;另一方面可以随着硬件技术的升级,更换更先进的倾角传感器或增加新的传感器种类,这也需要硬件系统接口预留及接口种类的丰富性。
第四,开磷拥有布局良好的产业优势。开磷已初步形成矿业与磷化工、磷化工与煤化工、磷化工与氟硅碘化工、主业与辅业相互配套和耦合共生的良好发展态势。化肥产品已形成从基础性肥料、功能性肥料到高端全水溶肥料的产品体系;煤化工发展已经形成从合成氨、甲醇到二氧化碳、油漆涂料、液化甲烷气、甲醇汽油等煤的精细化工产品体系;精细磷化工、氟硅化工、碘化工、电池新材料、光固化材料、水性聚氨脂等一批高端精细化工产业也正在快速成长,目前已经形成从贵州到江苏、内蒙古、湖南、江西的绿色化工产业布局。
5 结语
耕整地机具是农业生产中重要机型种类,其与电气控制技术结合能有效提升耕整地的作业质量。耕作深度控制作为有效改善耕作质量的重要手段,应当成为未来耕整地技术研究的主要方向之一,能够为未来的农机智能化作业创造有利条件。
[1] 何新如,孟祥雨,赵丽萍.耕整地机械发展现状分析[J].山东农机化,2014(6):24-25.
[2] 王超安,王传明.我国耕整地机械发展现状及未来趋势分析[J].农机市场,2012(8):27-29.
[3] 万腾,王文静,杨皓天,等.拖拉机电液悬挂的控制方式及技术实施途径设计[J].拖拉机与农用运输车,2020,47(1):4-6+11.
[4] 王淼,伍志丹,黄莺.电力控制系统在拖拉机耕深控制中的应用研究[J].农机化研究,2020,42(2):265-268.
[5] 杨少奇,张磊,张含思,等.悬挂式深松机耕深自动测量及控制方法的研究[J].农业与技术,2019,39(24):56-58.
[6] 杜新武,杨绪龙,庞靖,等.悬挂式旋耕机耕深监测系统设计与试验[J].农业机械学报,2019,50(8):43-51.
