一种基于信息融合的室内定位系统
2022-08-13四川信息职业技术学院梁高丽刘栩粼宋美蓉
◇四川信息职业技术学院 梁高丽 雷 浩 刘栩粼 宋美蓉
激光传感器具有高精度检测特性,但需要复杂的分类算法才能将定位目标从众多障碍物当中识别出来;RFID标签具有全球ID作为唯一标识,但对环境较为敏感,定误差较大。融合二者信息能很好的解决激光传感器的识别问题与RFID系统定位精度低的问题。因此,本文提出一种基于信息融合的室内定位系统。该系统通过RFID系统与激光传感器采集信息,并将采集到的信息通过网络发送至计算机,计算机对所接收到的信息进行分析处理,最后将被定位动态目标的位置反馈至用户。
随着物联网技术的飞速发展,人们对定位服务的需求越来越大。在空旷,无遮挡的室外环境中,基于卫星信号的全球定位系统(GPS)的定位效果较好。但是在室内环境中,由于建筑物的遮挡,会对卫星信号进行削弱,甚至阻断,导致卫星定位不适用于室内环境。但是人们每天大部分时间都是在室内度过,因此室内定位越来越受到研究人员的关注。近年来,越来越多的室内定位技术涌向市场,例如:超声波定位技术、超宽带定位技术、Wifi定位技术、红外定位技术、ZigBee定位技术等。这些定位技术虽然能实现室内定位的功能,但在使用时仍存在一定的缺陷[1]。利用超声波定位技术对目标进行定位时,由于波的反射、干涉、叠加等现象,会导致定位误差较大;选用超宽带技术来进行室内定位时,由于该技术需要占用较大的带宽,并且成本较高,因此应用领域会存在限制;Wifi定位技术虽然不会受到带宽的限制,但是必须要求用户开启wifi并且处于联网状态,同时在安装设备时,需要打眼走线,因此对施工环境有一定的要求;红外定位技术的定位精度,容易受其他光源的影响,并且要求定位目标必须在可视范围内;利用ZigBee技术进行定位,需要事先建立网络,使得定位效率低。
随着科技的飞速发展,这些传统的室内定位技术已经不能满足人们的需求。因此,一些研究人员开始对基于视觉和基于距离的传感器进行广泛的研究。基于视觉的定位具有较高的挑战性,因为它需要定位目标在可视范围内,并且还需要复杂的算法来识别对象,使得定位效率较低。
RFID(射频识别)标签具有全球唯一的识别码,因此RFID系统不需要复杂的识别算法就能将定位目标从众多障碍物当中提取出来。同时,RFID系统具有非接触式通信的优点,通信目标可在可视范围之外,因此可解决物体的遮挡问题。此外,RFID还具有体积小、便于携带、价格便宜、安装方便等优点[2]。因此,RFID定位技术被广泛应用于仓储、图书馆、超市、物流装配等领域[3-4]。
虽然RFID已经被广泛应用在许多领域,但是RFID系统也存在一些局限性,例如RFID不能直接获得标签的距离和方位,需通过信号强度信息来建立传感器模型才能定位目标。信号强度信息容易受周围环境的影响,导致定位精度低。为了提高定位精度,RFID系统通常与其他传感器(例如,激光测距仪和视觉相机)结合使用。Berz等人利用视觉相机来辅助RFID定位[5]。Duan等人提出一种融合RFID与计算机视觉的高精度定位系统,该系统将计算机视觉获取的位置信息和RFID系统输出的相位数据有效的融合起来,并且采用概率模型来消除由噪声和设备多样性引起的测量误差[6]。利用单一传感器信息对目标进行定位时,不仅容易产生较大误差,而且系统稳定性也不高。多信息融合不仅可以提高定位系统的准确性,还可以提高系统的鲁棒性。
激光传感器具有射程远、精度高、响应速度快等优点,被广泛应用于机器人的避障、定位和导航。在利用激光传感器进行定位时,虽然激光传感器能精确的检测到障碍物的位置信息,但是不能直接的对障碍物进行识别。如果想单纯的通过激光信息对障碍物进行识别,需要复杂的识别算法,这不仅增加了定位的时间,更增加了定位的难度。RFID标签具有的全球唯一标识,可以直接识别目标,能很好的解决该问题。因此本文提出一种基于信息融合的室内定位系统,该系统通过融合RFID系统信息与激光传感器信息对室内动态目标进行定位。
1 系统总体设计
该定位系统包含二维激光传感器、RFID系统、计算机。其中二维激光传感器负责采集环境当中障碍物的位置信息,并将这些位置信息传送至计算机;RFID系统负责采集标签的相位信息,同时也将这些信息传送至计算机,计算机通过对采集到的信息进行分析与处理,可以将传感器采集到的原始数据转换为动态目标的位置;最后将动态目标的位置反馈至用户,让用户实时监控目标位置。
1.1 RFID系统
RFID系统由三部分组成,分别是阅读器、标签、以及天线。其中,阅读器(Reader)是RFID系统中最重要的组成部分,它既可以发送无线电讯号,也可以接收无线电讯号,因此可以无接触地读取并识别RFID标签中所保存的电子数据,从而达到自动识别物体的目的,同时,阅读器可以通过USB接口或者网口与计算机进行通信,可进一步将标签中的信息传送至计算机和网络,实现对物体信息的采集、处理及远程传送等管理功能;RFID标签(Tag)主要由线圈和芯片组成,每个RFID电子标签都有全球唯一的电子编码,其体积小、便于附着在需要定位的物体上,用来标识目标对象;天线(Antenna)主要在标签和阅读器之间传递无线电讯号。
RFID系统的工作原理主要是阅读器通过天线发射无线电讯号,当标签接收到天线发射的信号时,内部电路被激活,向天线反射电信号,当天线接收到标签的反射信号后,阅读器对该信号进行解码,最后由计算机对解码信息进行分析与处理,可以获得标签的相位信息,根据相邻时刻同一标签的相位差,可以计算出标签的径向速度。
1.2 激光传感器
二维激光传感器的测距原理与无线电雷达相同,二维激光传感器向周围发射激光束,并且记录发射时间;当这些激光束接触到障碍物时,激光束会被反射回传感器的接收端,当传感器的接收端接收到激光束时,记录接收时间。根据发射时间与接收时间之间的时间差与光速,可计算障碍物与二维激光传感器之间的距离。最后根据相邻时刻同一物体与传感器之间的距离差,可估算该物体移动的径向速度。
1.3 数据处理
(1)相位信息处理。根据RFID系统的工作原理可知,标签与阅读器之间的距离可以通过光速与无线电信号的往返时间来进行估算。假设无线电信号的传播时间为光速为,标签与阅读之间的距离可表示为:
其中,表示信号传播的频率,该频率的大小可以通过调节阅读的信道来控制。相位信息与距离的关系为相位信息测标签的径向速度奠定了基础。相位信息在传输的过程当中不仅受到传输距离的影响,同时还受到传输电路、接收回路与反射特征的影响,因此会产生相位旋转的现象,导致相位信息不准确,从而影响定位效果。为了消除相位旋转对定位结果带来的影响,本文利用相位差来消除相位旋转。假设读写器在相邻时刻时刻检测到的相位值分别为因此标签从到时刻的移动的径向速度可以通过(3)式求得

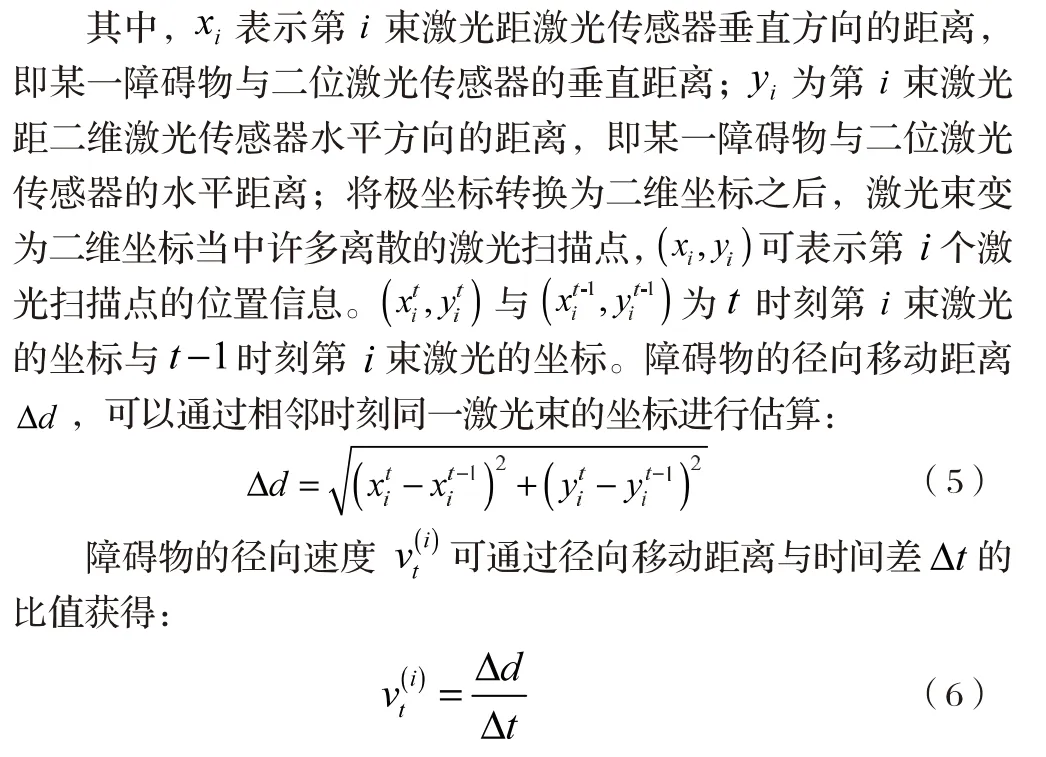
(2)激光信息处理。当激光传感器向周围发射光束的同时,会将发射时间记录下来;激光束碰到障碍物时,激光束反射回激光传感器的接收端,这是激光传感器记录激光束的返回时间;最后通过两次时间差计算出障碍物与激光传感器之间的距离[7]。

1.4 融合多信息定位动态目标
当需要定位的动态目标,携带标签在环境中行走时,RFID系统可以通过阅读器获取标签的相位信息,并且通过计算机将相位信息处理成标签移动的径向速度。二维激光传感器将采集到的障碍物位置信息传送至计算机,计算机将这些位置信息处理成障碍物移动的径向速度。同一时刻在同一环境中移动的障碍物可能不止一个,因此需要将定位目标从众多障碍物当中区分出来。对于需要定位的动态目标来说,同一时刻标签移动的径向速度与人体移动的径速度应该非常接近,因此,本文通过寻找与标签径向速度最接近的障碍物径向速度,将该障碍物认为是需要定位的动态目标:
选取具有最佳相似度的障碍物,该障碍物所对应的位置即为动态目标的位置。当计算机将原始数据处理为动态目标的实时位置之后,立即将该位置信息反馈至用户,便于用户观察动态目标的运行轨迹。
2 结束语
本文所提出的基于信息融合的室内定位系统,通过在室内环境中安装RFID系统来获取动态目标所携带标签的相位信息;二维激光传感器来获取环境中障碍物的位置信息。计算机将相邻时刻的相位信息处理为标签的径向速度;并将相邻时刻的障碍物位置信息处理为障碍物的径向速度,最终通过寻找与标签的径向速度最接近的障碍物,该障碍物所对应的坐标即为动态目标的位置。该系统融合了RFID信息与二维激光传感器信息,来对动态目标进行定位,不仅克服了激光传感器识别目标存在的奇异性,也克服了RFID系统定位不精确的问题。