虚拟同步发电机有功功率偏差前馈阻尼策略
2022-08-12李洋齐蓉邓飞林辉
李 洋 齐 蓉 邓 飞 林 辉
(西北工业大学自动化学院, 西安 710129)
近年来,为了缓解能源危机,以逆变器作为并网接口的风能、太阳能等分布式能源得到了快速的发展[1].与传统同步发电机(synchronous generator,SG)相比,逆变器具有控制灵活、响应迅速等优点,但由于缺少惯性,当分布式电源渗透率较高时,电网电压频率和幅值的稳定受到严重威胁[2-4].为此,一些学者借鉴SG的运行特性,提出了虚拟同步发电机(virtual synchronous generator,VSG)的概念[5-8].VSG采用分布式能源配置储能单元的形式,利用逆变器控制算法模拟SG的调频、调压功能和转子惯性,逐渐成为解决分布式电源并网稳定性的有效措施之一[9].
然而,VSG中模拟转子惯性也引入了类似于SG的振荡模式,导致在功率参考和电网频率扰动下,有功功率响应产生振荡和超调.而逆变器的过流能力有限,容易导致过流保护.因此,VSG控制需要适当的阻尼措施,以改善有功功率的暂态性能.传统VSG中下垂系数需要根据稳态下垂特性进行设计,而无法兼顾阻尼调节.
为了抑制功率超调,引入阻尼功率是VSG普遍采用的一种方法.文献[10-11]中采用基于锁相环(phase-locked loop,PLL)的阻尼功率控制方法,该方法模拟了SG的阻尼机理,所产生的阻尼功率正比于VSG输出电压的角频率和电网角频率间的差值.但是,该方法需要利用PLL来获取电网角频率信息,弱电网下电网频率波动会加剧VSG输出功率的振荡,降低系统稳定性.为了避免PLL的使用带来的问题,简化系统结构,文献[12]用额定频率代替电网频率.但是这种方法中阻尼系数与下垂系数作用相同,阻尼系数的引入会导致VSG输出功率稳态偏差.为此,文献[13-14]中分别引入带通和高通滤波器,使阻尼功率仅在暂态波动过程中发挥作用并降低高频干扰,同时不影响系统的稳态下垂特性.文献[15]中分别在有功调节通道和阻尼功率通道加入低通和高通滤波器,将一次调频特性与阻尼特性进行时间尺度上解耦,从而保证下垂系数与阻尼系数的独立设计.但是上述基于滤波器的方法受滤波器时间常数影响较大.文献[16-17]中提出阻尼校正环,通过在摇摆方程中引入转矩微分项提高系统阻尼.文献[18-19]在有功调节中引入功率偏差微分,并在阻尼比、调节时间、内外环解耦等约束下分析了微分增益的边界范围,但是该方法会同时影响振荡频率,不能实现对系统阻尼的独立调节,另外微分会引入高频噪声,影响系统稳定性.文献[20-21]提出状态反馈阻尼方法,通过状态反馈可以任意配置极点,从而优化系统阻尼与振荡频率,但需要调节的参数过多,实现较复杂.
针对上述问题,本文提出一种基于有功功率偏差前馈的改进VSG阻尼方案.首先基于小信号传递函数分析了并网VSG在有功功率参考或电网频率变化时有功功率超调和振荡问题,简单介绍了基于有功功率微分反馈的阻尼方案.在此基础上,提出了基于有功功率偏差前馈的改进VSG阻尼方案,将有功功率偏差前馈至摇摆方程的输出处,然后利用闭环传递函数极点分布分析了前馈增益对系统稳定性的影响,并给出了参数设计方法.最后对本文方案进行了仿真和实验验证.
1 虚拟同步发电机控制策略


图1 VSG典型并网电路及控制结构
VSG的本质是通过控制算法模拟SG本体模型以及调频/调压环节,使逆变器具有SG的输出特征,主要包括有功-频率调节环、无功-电压调节环、虚拟阻抗环、电压电流内环及坐标变换模块,如图1中控制部分所示.图中,s表示Lapalce变换算子,Pref和Qref分别为有功功率和无功功率的参考值,Pe和Qe分别为VSG实际输出有功功率和无功功率,Dp和Dq分别表示有功-频率下垂系数和无功-电压下垂系数,J表示虚拟惯性,K表示无功环积分系数,ωn和Vr分别表示VSG输出角频率和输出相电压幅值的额定值,ω表示VSG输出电压的实际角频率,Vm表示VSG实际输出电压幅值,Em和θ分别为VSG输出给定电压的幅值和相角,合成三相电压后经过虚拟阻抗环节产生电压电流环的参考电压.
VSG中有功-频率调节模拟了SG的惯性和一次调频特性,无功-电压调节模拟了SG的一次调压特性,其数学形式可以写为[22]
(1)
式中,Td为阻尼转矩,根据不同的阻尼方案会有所不同,传统VSG中没有引入额外阻尼,Td=0.
VSG中下垂系数Dp和Dq根据下垂特性确定[5],虚拟惯性J与系统要求频率变化率和储能容量有关[23].另外,J和K的选择需要考虑有功环和无功环的时间常数,在功率解耦和响应时间之间进行协调[24].有功环时间常数τf和无功环时间常数τv分别为
(2)
虚拟阻抗环用于调节VSG的等效输出阻抗,使其呈感性.VSG中电压控制器采用dq坐标系下电容电压/电感电流双闭环控制,为提高动态响应速度,电流内环采用比例调节器,并引入输出电压前馈项;电压外环采用比例-积分调节器.电流环输出经过正弦脉宽调制(sinusoidal pulse-width modulation,SPWM)算法生成逆变器开关管的驱动信号,控制开关管导通和关断.
2 VSG的振荡特性与阻尼方案
由于电压电流内环响应速度远大于功率外环,为简化分析过程,下面分析中忽略了内环的影响.
2.1 振荡特性分析
考虑到VSG的系统等效阻抗主要呈感性,根据线路功率传输原理,VSG馈入PCC的有功功率可以表示为[18]
(3)
式中,Ug为电网电压幅值;Em为VSG输出电压幅值;ωg为电网角频率;δ为VSG输出电压与电网电压的相角差,也称功角;X为VSG输出阻抗与并网线路阻抗之和.
将输出功率方程(3)代入VSG模型中,可以得到图2所示的简化VSG并网有功功率控制框图,其中Kp=3EmUg/X.
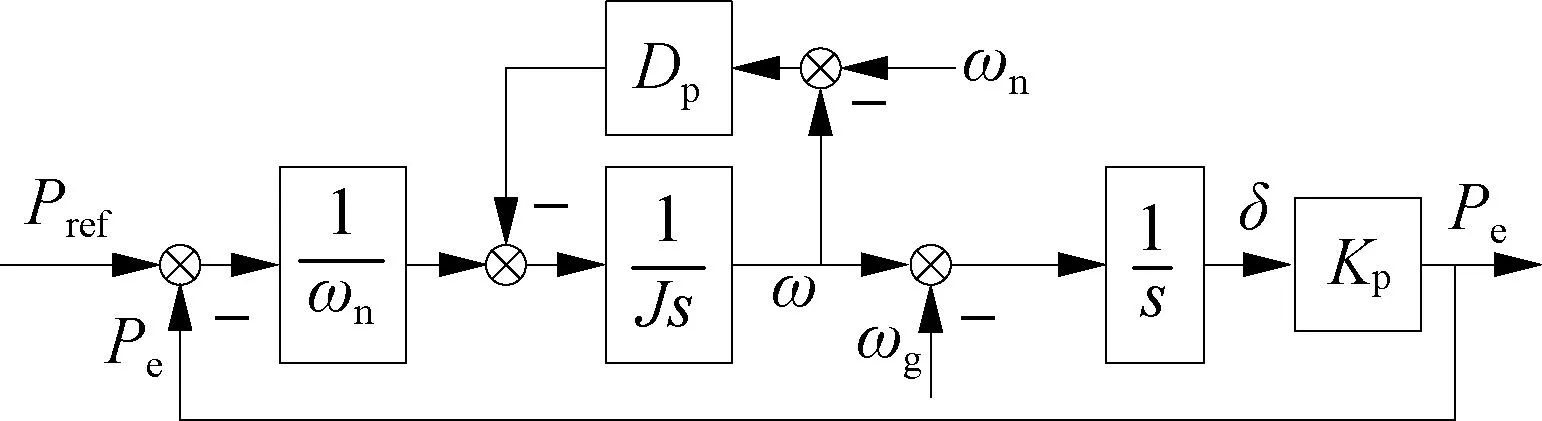
图2 简化VSG并网有功功率控制框图
根据图2,推导VSG并网输出电压频率和有功功率的闭环传递函数为
(4)
式中,λ(s)=ωnJs2+ωnDps+Kp.
令s→0,可得到稳态输出电压频率和有功功率为
(5)
由式(5)可知,稳态时VSG输出频率与电网频率一致;当电网频率偏离额定值时,VSG输出有功功率也会偏离参考值,偏差为-ωnDp(ωg-ωn),符合稳态下垂特性要求.
根据式(4)可得小信号模型下输出有功功率为
ΔPe=Gp(s)ΔPref-Gg(s)Δωg
(6)

对比二阶阻尼系统规范式,可以获得系统的无阻尼自然振荡频率ω′和阻尼比ξ分别为
(7)
从式(6)和式(7)可以看出,Gp(s)和Gg(s)具有相同的特征方程,由J和Dp共同决定极点位置.与Gp(s)不同,Gg(s)中存在闭环零点,从而影响有功功率动态响应.不同J和Dp下小信号闭环传递函数的极点分布如图3所示,图中λ1和λ2表示闭环极点.由于不存在右半平面极点,系统始终保持稳定;随着J增加,极点逐渐靠近虚轴,系统阻尼变小,稳定性变差,如图3(a)所示.Dp较小时,λ1和λ2为共轭极点,Dp增加时,阻尼增加,稳定性增强,ω′保持不变;随着Dp继续增加,闭环极点由共轭极点变为实数极点,系统由欠阻尼变为过阻尼状态,其中λ2逐渐靠近虚轴,成为主导极点,系统响应变慢,如图3(b)所示.

图3 不同J和Dp下系统极点分布
根据文献[25],可以计算不同J和Dp下Gp(s)和Gg(s)动态性能指标,如图4、图5所示,其中J从0.2 kg·m2增加到1.2 kg·m2,Dp从10 N·m·s/rad增加到30 N·m·s/rad.可以看出,Gp(s)和Gg(s)变化趋势基本一致,但由于存在闭环零点,Gg(s)比Gp(s)响应更快,超调更小,且调节时间更短.当J增加时,调节时间增加,系统响应变慢,且超调增加;当Dp增加时,调节时间减小,系统响应变快,超调减小.
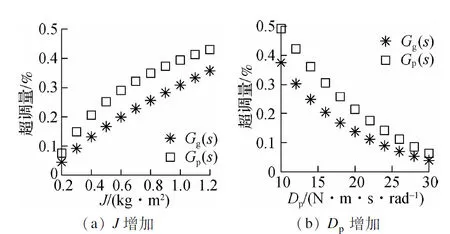
图4 不同J和Dp下有功功率超调量变化

图5 不同J和Dp下有功功率调节时间变化
综上,传统VSG并网运行时,有功功率稳态特性主要受有功下垂系数Dp影响,与J无关.动态特性与J和Dp均相关,J越大,系统阻尼越小,超调越大,调节时间越长;Dp越大,系统阻尼越大,超调越小.调节J能改变系统阻尼,但同时影响ω′,且不能进行独立设计.Dp能够单独调节系统阻尼,但是Dp是根据VSG稳态下垂特性要求确定的,不能任意配置,因此需要引入新的控制策略来实现系统阻尼的独立调节.
2.2 常用阻尼方案分析
为提高系统阻尼,减小和抑制VSG输出功率超调和振荡,国内外学者做了很多研究,下面以基于有功功率微分的阻尼方案为例进行说明.
由式(3)可知,功角δ的微分等于VSG输出电压与电网电压的角频率差,因此利用VSG输出功率或转矩的微分代替功角δ来计算阻尼转矩,从而避免引入PLL,如图6所示.图中,Ddcl为阻尼系数,Tfdcl为低通滤波器时间常数.
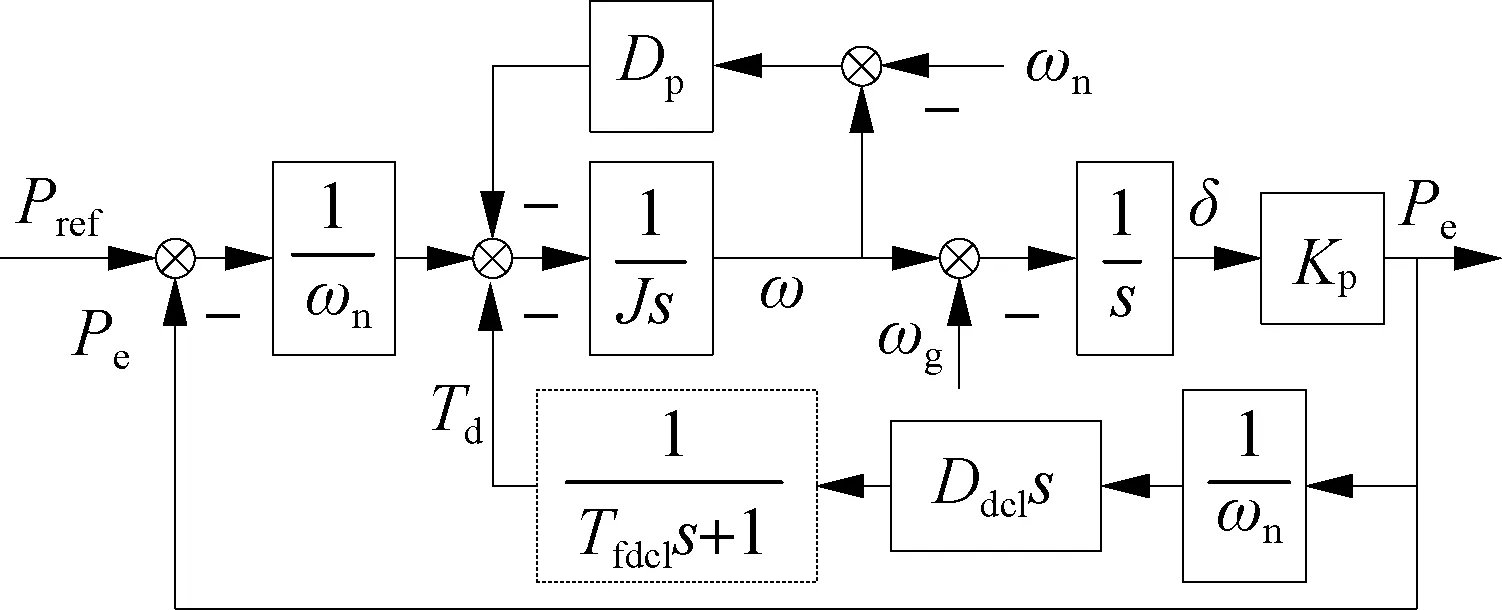
图6 基于功率微分的阻尼方案
为简化分析,忽略引入的低通滤波器,此时,阻尼转矩为
(8)
推导VSG输出有功功率和频率为
(9)
式中,λ2(s)=Jωns2+(ωnDp+DdclKp)s+Kp.稳态时,令s→0,此时ω→ωg,Pe→Pref-ωnDp(ωg-ωn),符合稳态下垂特性要求.
根据式(9),输出功率小信号闭环传递函数中,有
(10)
系统的ω′和ξ分别为
(11)
可以看出,基于有功功率微分的阻尼方案中,系统阻尼可以由阻尼比Ddcl进行单独调节,但功率微分会引入高频噪声.尽管引入低通滤波器以抑制噪声,但是带来的延迟和引入的新极点也会对系统产生不利影响.
3 基于功率前馈补偿的改进VSG阻尼策略
针对上述阻尼方案中存在的问题,本文提出一种基于有功功率偏差前馈的改进VSG控制方案,将实际输出功率与功率指令偏差前馈至角频率处,如图7所示.图中,H=1/(ωnDp),k为前馈增益,Δωd为有功功率偏差前馈分量.
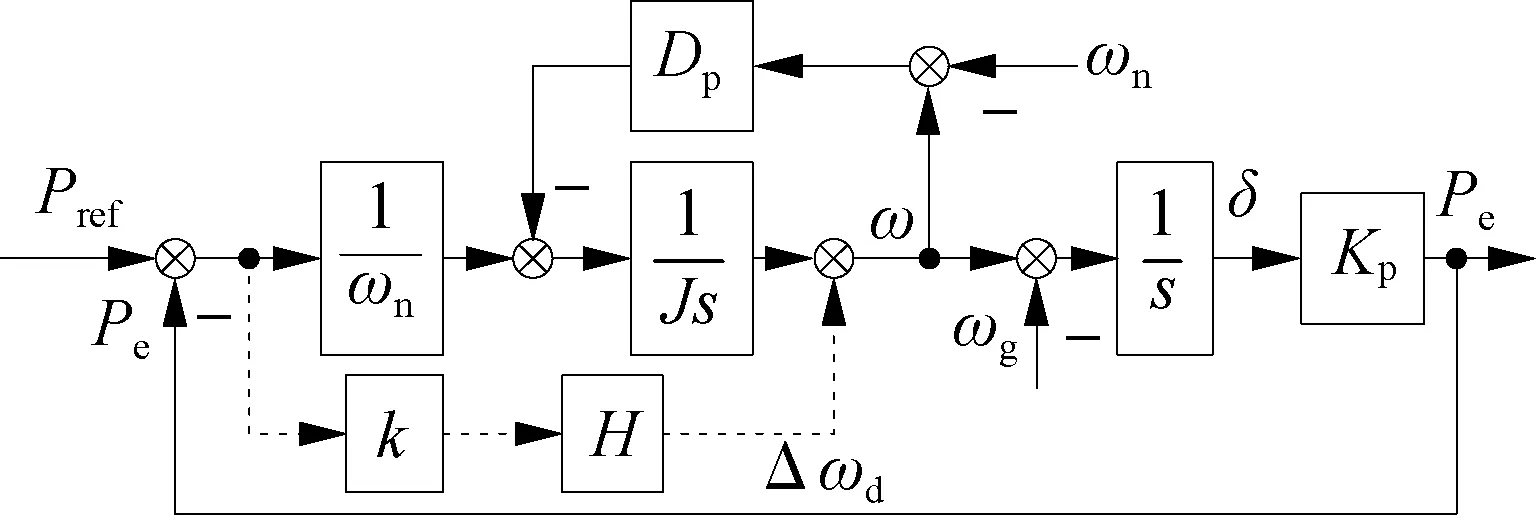
图7 基于有功功率偏差前馈的改进VSG阻尼方案
根据图7可以得到VSG的输出功率和频率为
(12)

根据式(12)可以看出,采用图7方案后,VSG输出有功功率的小信号闭环传递函数变为
ΔPe=Gp1(s)ΔPref-Gg1(s)Δωg
(13)
式中
(14)
根据式(14)可以得到系统的ω′和ξ分别为
(15)
可以看出,本文方案可以在不改变振荡频率的前提下,通过调节k来改变系统阻尼,实现阻尼的独立调节.
3.1 稳定性分析
前馈增益k对稳定性的影响可以根据闭环系统极点分布进行分析,如图8所示.图中分别给出了J=0.2,0.5,0.8 kg·m2三种情况,Dp=20.26 N·m·s/rad保持不变,k从0增加到2,箭头方向表示k增加时闭环极点的变化方向.可以看出,k变化时,闭环系统极点一直在左半平面,系统保持稳定.

图8 不同前馈增益k下系统闭环极点分布
当k=0时,为传统VSG方案,系统存在一对共轭极点,距离虚轴最近,此时阻尼最小;随着k增大,共轭极点逐渐向实轴靠近,最终全部落在实轴上,系统阻尼增加,超调减小,但振荡频率基本不变;k继续增加时,极点λ1逐渐向虚轴靠近,成为主导极点,系统响应时间变慢.J增加时,极点变化趋势基本不变,但是离虚轴更近,调节时间增加.
图8和图3(b)中,k和Dp变化导致的极点位置变化趋势相近,但从式(14)可以看出,k变化并不改变Gg(s)稳态值,即k不改变系统稳态下垂特性.
3.2 参数设计
综合考虑动态功率超调量、调节时间和相角裕度等要求,Gp1(s)需要同时满足以下条件.
1) 对于并网VSG系统,有功功率超调会引起不必要的振荡,造成储能系统电流冲击,为此设置阻尼比ξ需满足0.8≤ξ≤1.0[18-19],即
此时,0.63≤k≤0.98.
2) 系统参数摄动、外部扰动等因素会导致稳定性分析误差,因此设计补偿增益时需要保留适当的相角裕度γ,一般要求γ>60°.不同k下相角裕度如图9(a)所示,可以看出,满足阻尼比要求的k值同时也满足相角裕度要求.
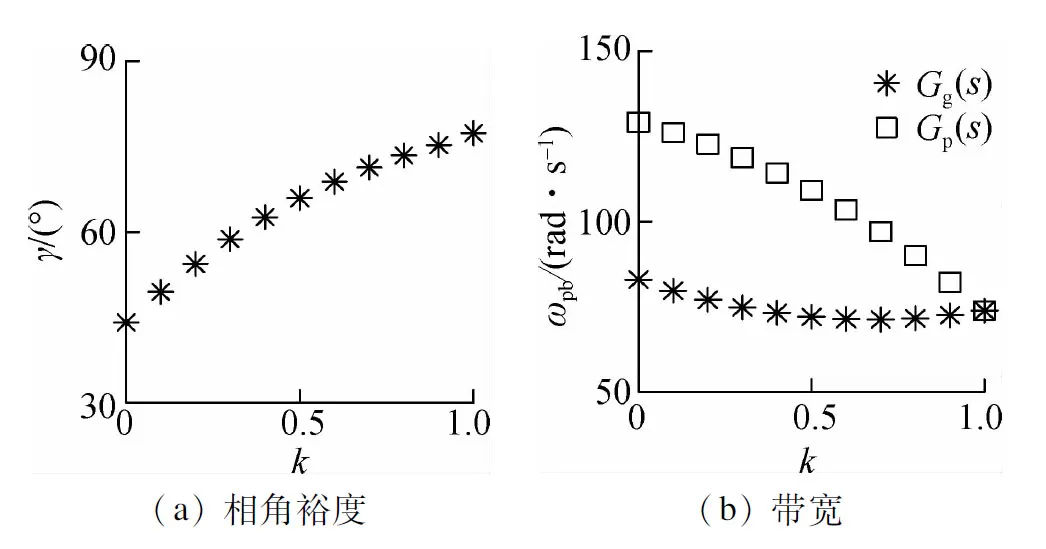
图9 不同前馈增益k下相角裕度和系统带宽
3) 为了避免电压电流内环对功率外环的影响,两者在时间尺度上需解耦.本文电压环带宽设计为ωvb=250×2π rad/s,因此功率外环带宽满足ωpb≤ωvb/10.不同k值下系统带宽如图9(b)所示,可以看出,满足阻尼比要求的k值也满足带宽要求.
4 仿真和实验验证
4.1 仿真结果
本文基于Matlab/Simulink软件搭建了仿真平台,对传统VSG方案、基于有功功率微分的阻尼方案和本文方案进行了仿真对比,仿真参数见表1.

表1 仿真中系统参数
初始时刻,有功和无功功率参考值为0;t=2 s时,有功功率参考值变为8 kW;t=3 s时,电网频率阶跃至49.95 Hz,t=4 s时,频率恢复正常;t=5 s时,仿真结束.仿真和实验中,定义有功功率超调σp为
式中,Pmax/min为有功功率暂态最大值或最小值;P1s为初始稳态有功功率;P2s为暂态后稳态有功功率.定义调节时间ts为曲线进入2%误差带的时间.
图10中给出了不同方案在功率参考和电网频率变化时输出有功功率仿真波形.在有功功率微分阻尼方案中,阻尼系数Ddcl=0.012 6,滤波时间常数Tfdcl=0.008;本文方案中前馈增益k取0.63.根据表1中参数,系统无额外阻尼设计时,系统阻尼约为0.44,抑制超调能力较弱.从仿真结果看,功率参考增加至8 kW时,VSG有功功率超调σp达到30.0%,调节时间为0.349 s;加入有功功率微分的额外阻尼后,系统阻尼增加至0.8左右,有功功率超调σp降低为11.3%;在采用本文方案后,有功功率超调σp降低为6.3%,详细动态性能见表2.根据表1中有功-频率下垂系数Dp参数,电网频率降低或升高0.05 Hz(0.1%),VSG输出有功功率应对应增加或减少2 kW(20%).稳态下,3种方案均满足下垂特性要求.暂态下,采用本文方案后,电网频率变化时有功功率超调明显减小.不同阻尼方案在功率参考变化时电网电压与输出电流仿真波形如图11所示,可以看出电网电压在VSG输出功率变化时保持不变,VSG输出电流幅值与有功功率响应趋势基本一致.

(a) 功率参考变化

表2 仿真中不同阻尼方案下功率响应动态性能

(a) 传统VSG
4.2 实验结果
为进一步验证本文方案的有效性,搭建硬件实验平台,其电路拓扑如图12所示,控制算法采用TMS32F28335实现,实验及控制参数见表1.实验中,对逆变器1#采用恒定电压控制,以模拟电网;对逆变器2#采用VSG控制.为实现本文算法,首先计算频率偏差ω-ωn和Δωd,再通过转子运动方程(1)计算角频率中间变量,并与Δωd相加得到VSG实际输出角频率,最后通过积分得到角度信息,并用于dq变换,生成电压环参考电压信号.离散积分均采用后向欧拉积分方法.

图12 实验平台电路拓扑
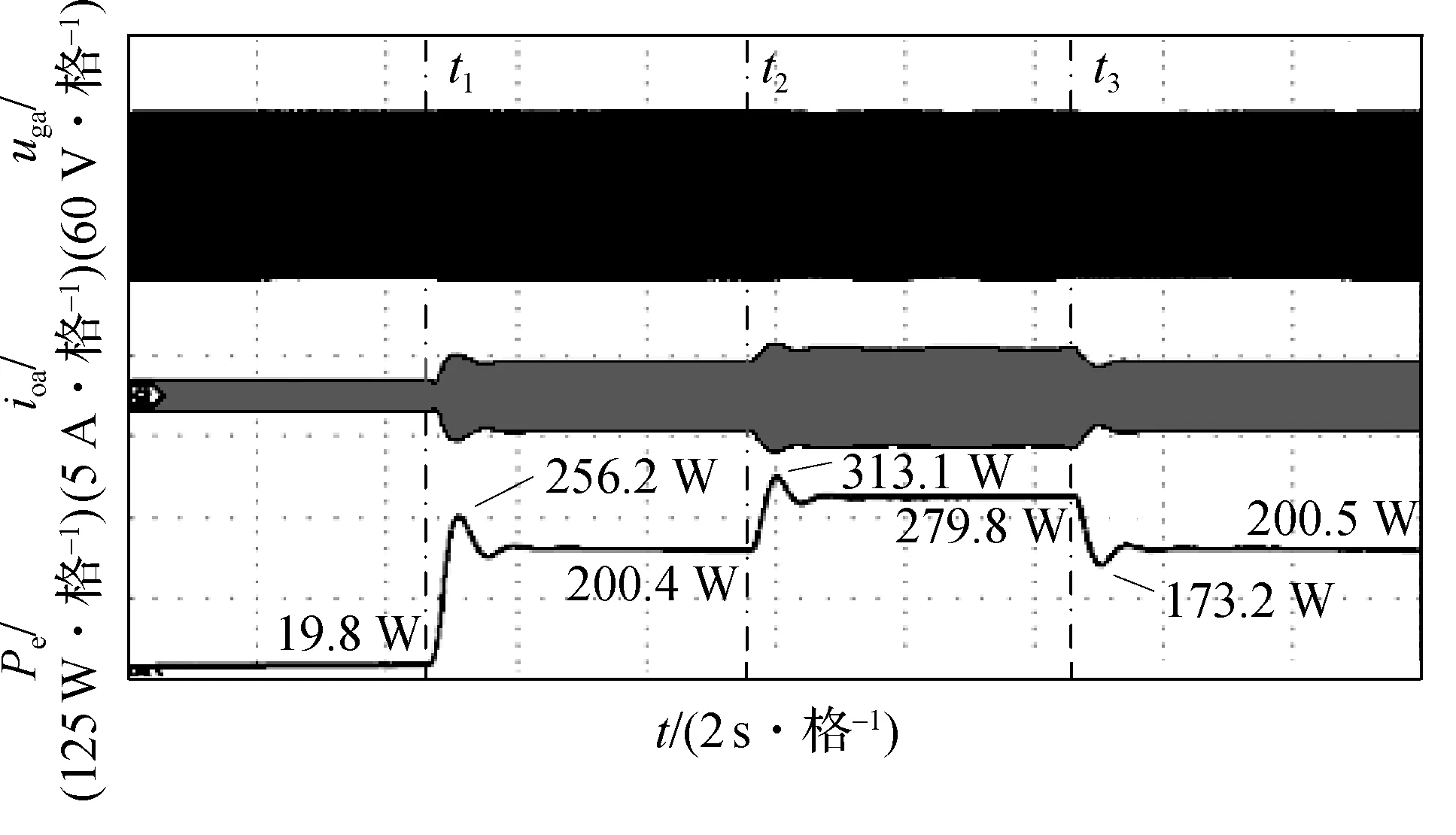
图13分别给出了传统VSG方案、基于有功功率微分的阻尼方案和本文方案下PCC电压、输出电流和输出有功功率的动态响应波形.实验与仿真工况类似,t1时刻有功功率参考从20 W变为200 W,频率为50 Hz保持不变;t2时刻,电网频率降低0.1%(0.05 Hz);t3时刻,电网频率恢复正常.根据有功频率下垂系数,电网频率降低0.1%时,输出有功功率应增加20%,即80 W.
图13(a)中,传统VSG方案系统阻尼较弱,在功率参考变化时(t1),σp达到30.1%,经过约3次振荡才达到稳态200.4 W,调节时间约为1.7 s;电网频率降低时(t2),σp达到41.9%,稳态时有功功率增加约79.4 W;电网频率恢复时(t3),σp达到34.3%,稳态有功功率为200.5 W.
图13(b)中,阻尼系数Ddcl=0.04,低通滤波器截止频率为10 Hz.由于加入了有功功率微分的额外阻尼,在功率参考变化时,σp减小至13.7%,经过一次振荡达到稳态200.1 W,调节时间也减小至1.2 s;电网频率降低时,σp减小至30.2%,稳态时有功功率增加约78.8 W;电网频率恢复时,σp达到18.1%,稳态有功功率为199.8 W.
(a) 传统VSG
图13(c)中,根据参数设计方法选择k=0.98,加入有功功率偏差前馈后,在功率参考化时输出功率超调降低至2.9%,电网频率变化时无明显超调.电网频率降低时,有功功率增加约81.3 W,误差为1.63%,表明本文方案并不改变VSG的下垂特性.相比于基于有功功率微分的阻尼方案,本文方案不需要额外微分计算和滤波,实现简单,抑制超调效果明显.
实验中,PCC点电压波动不明显,输出电流幅值变化趋势与有功功率变化趋势基本一致.
5 结论
1) 建立了VSG并网运行小信号模型,分析了其振荡特性,提出了基于有功功率偏差前馈的改进阻尼策略,实现了系统阻尼的单独调节,降低了在功率指令和电网频率变化时输出有功功率的响应超调.
2) 与微分阻尼方案相比,本文方案中前馈增益参数设计简单,不需要引入额外的控制器或微分运算,同时仅需要本地信息,不依赖通信.
3) 搭建仿真和实验平台对所提方案进行了验证.实验结果表明,采用本文提出阻尼方案后,系统阻尼提高,在功率参考和电网频率变化时VSG输出功率超调减小至2.9%,同时不影响稳态下垂特性.
4) 下一步工作将对本文方案在VSG孤岛并联运行模式下改善系统动态响应问题进行研究.
