一种回扫的机载火控雷达扇区搜索四行扫描方式
2022-08-11徐保伟孙海龙陈玉杰
王 聪, 徐保伟, 孙海龙, 陈玉杰
(1.中国民用航空飞行学院空中交通管理学院,四川 德阳 618000; 2.空军石家庄飞行学院,石家庄 050000)
0 引言
机载火控雷达是现代战斗机非常重要的电子系统,它所提供的目标态势信息能够帮助飞行员了解载机所处战斗环境中的敌我双方作战态势,协助飞行员及时做出正确且关键的战术决策。目前,在火控雷达技术的发展上,一方面是研制新体制机载雷达,如相控阵雷达等,另一方面是通过各种技术手段对现有体制机载雷达进行改进完善,从而使机载雷达发挥其最大性能[1-6],更好地完成“先敌发现”的任务[7]。
文献[1]针对某单脉冲机械扫描雷达所执行空间目标探测任务的新特点新要求,在不改变雷达现有体系结构的前提下,通过嵌入一台指挥监控计算机,实现了空间目标探测自动化的工作模式;文献[2]提出按脉冲重复频率(PRF)实时计算波束指向参数的方法,提高了波束扫描的精度,改善了目标起伏特性,增强了雷达系统的跟踪精度和威力;文献[3]则从理论角度提出了一种单脉冲机载火控相控阵雷达的主杂波谱区低速运动目标检测方法,用以改善雷达对于地面低速运动目标的检测;文献[4]从算法的角度提出了一套可以实现多目标跟踪的雷达计算方法。可以说,工程技术人员为了充分挖掘机载火控雷达系统的各项潜力,会设法通过一定的技术手段来提高雷达的功能性能。本文所提出的一种回扫的机载火控雷达扇区搜索四行扫描方式,在本文所建立的雷达单次扫描发现目标概率模型下,能够从统计意义上缩短雷达在一个扫描周期内首次发现目标的时间。
1 扇区搜索扫描方式
空空探测功能是战斗机对机载火控雷达的主要需求,其任务是为载机提供对空中目标的搜索和跟踪能力,为飞行员提供空中战场的态势信息,为武器攻击提供对目标的精确跟踪信息并完成对空空导弹的中距制导。
空空探测搜索方式通常有扇区搜索、引导搜索和猝发探测搜索3种搜索方式。其中,扇区搜索是最主要的搜索方式,它采用大范围空域搜索的方式获取态势信息,是一种自主性较强的搜索模式,能为载机提供较大空域范围的态势感知信息。
机载火控雷达扇区搜索通常采用笔状波束,以获取更高的角度测量精度,同时,通过俯仰多行扫描分时覆盖的方式实现较大空域范围的搜索。
机载火控雷达扇区搜索一般具有俯仰扫描行数的选择,以便根据作战需要选择不同空域覆盖范围进行搜索,其中对于大范围空域的搜索通常采用四行扫描,如图1所示。
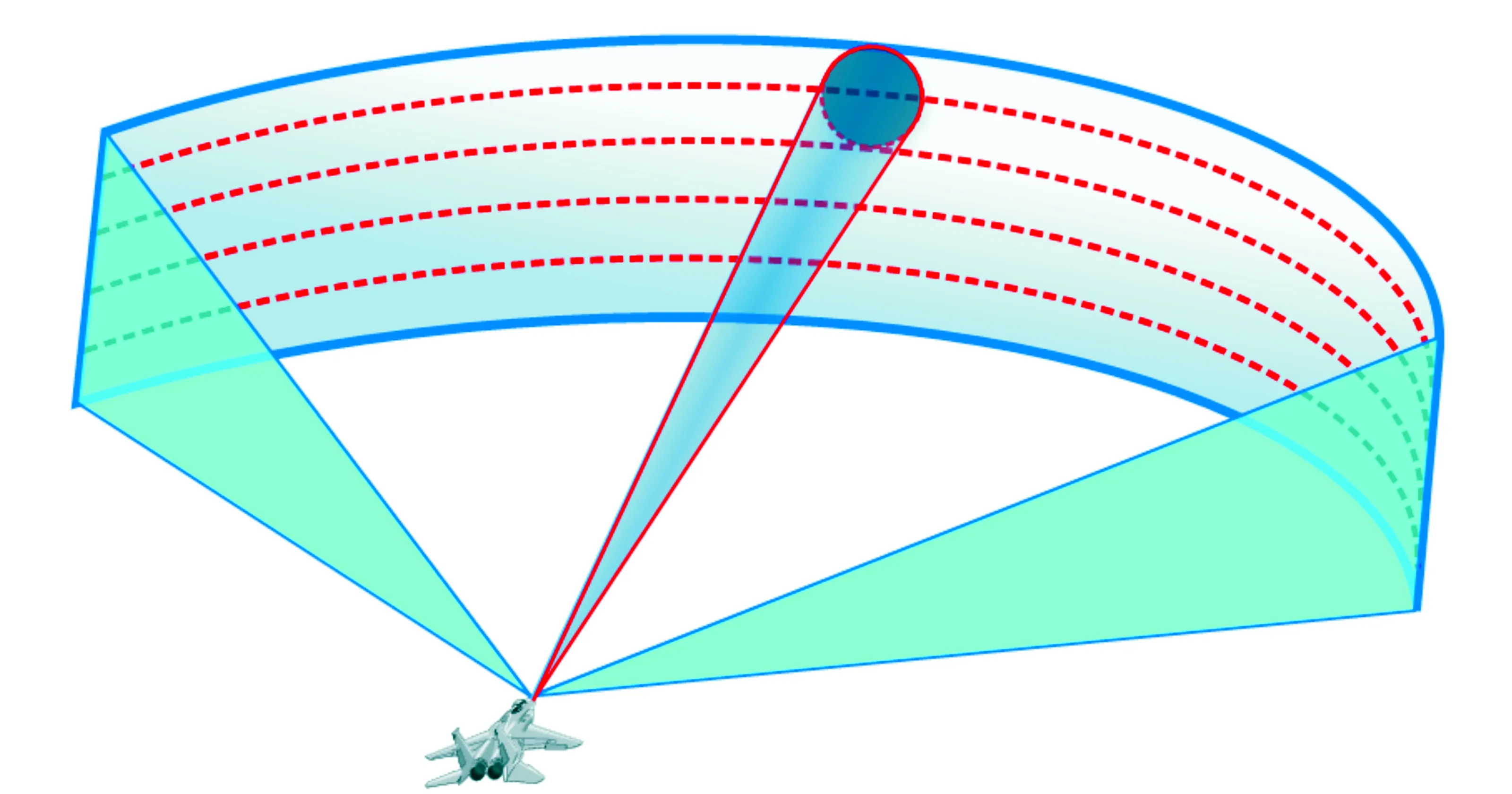
图1 机载火控雷达扇区搜索示意图Fig.1 Sector search of airborne fire control radar
图中以载机为圆心,载机前方一定方位和俯仰角度下所形成的空域即为扇区搜索扫描空域。该区域相对于载机的方位和俯仰角度为扇区搜索扫描方位和俯仰范围。机载火控雷达扫描该区域一周的时间为扇区搜索扫描周期。在分析扫描方式时,可将该区域展开为一个平面进行分析。目标可能出现在该区域的任何一个地方,在有信息引导的条件下,可假设目标在此区域符合正态高斯分布[8]。没有信息引导时,假设目标在该区域出现的位置符合均匀分布。
1.1 传统逐行扫描四行扫描方式
传统逐行扫描四行扫描方式及路径如图2所示,这是一种从上到下、左右来回扫的逐行扫描方式。
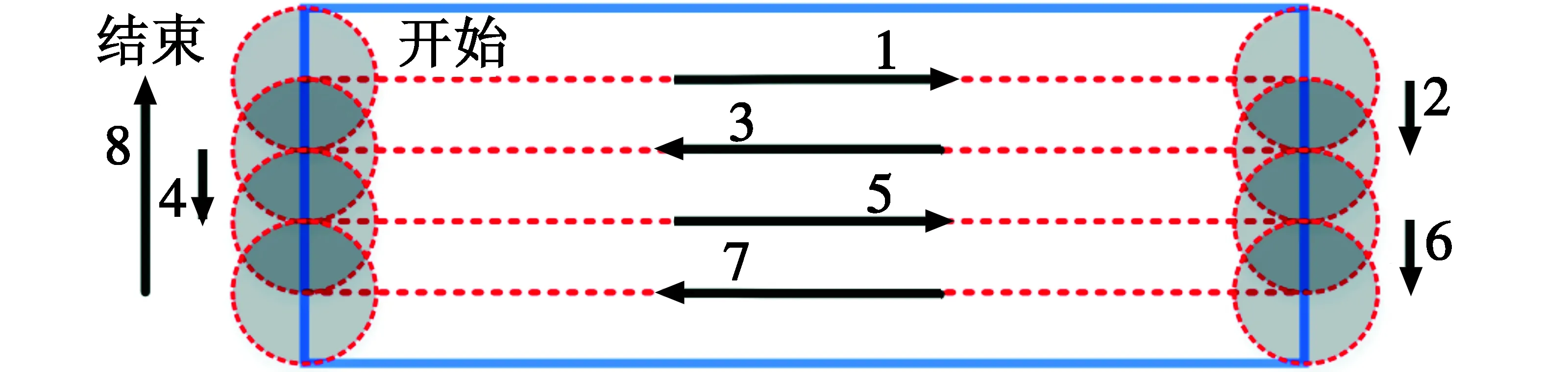
图2 逐行扫描方式路径图Fig.2 Progressive scanning path
如图2所示,在一个扫描周期内,雷达波束由左上角开始沿路径1由左至右扫描,扫描完第1行后,波束沿路径2向下移动一个波束半径,并沿路径3由右至左扫描第2行。以此类推,依次沿路径4,5,6,7扫描后,沿路径8返回起始处,完成一个扫描周期。
值得说明的是,在行与行之间一般都设置有一定的波束交叉,这主要是为了避免扫描行间检测性能的下降超过限制。通常,这种波束的交叉一般设定在天线增益的-0.5 dB处。在工程上,该交叉处可以近似等效为1/2个波束半径位置,即行与行扫描交叉了一个半径的波束[5]。
这种传统的逐行扫描四行扫描方式是目前多数雷达采用的扇区搜索扫描方式,它简单实用,能满足现代火控雷达空域搜索扫描的需求。
1.2 回扫四行扫描方式
回扫四行扫描方式不同于逐行扫描方式。如图3所示,它在一个扫描周期内,雷达波束由左上角开始沿路径1从左至右扫描完第1行后,直接沿路径2向下移动一个波束直径,跳转到第3行沿路径3进行扫描;沿路径3扫描完第3行后,再沿路径4折回扫描第2行,然后依次沿路径5扫描第2行,沿路径6跳转第4行,沿路径7扫描第4行,沿路径8返回初始位置。
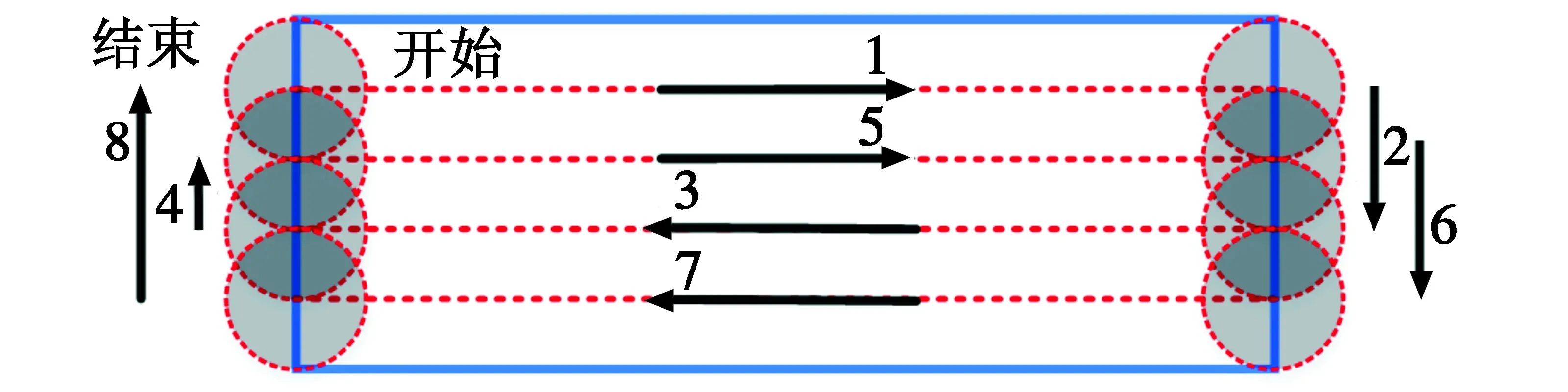
图3 回扫扫描方式路径图Fig.3 Flyback scanning path
1.3 两种四行扫描方式对比分析
两种扫描方式均按照要求实现了扫描空域的完全覆盖,并且都是通过四行扫描方式实现的。但是由于两者扫描路径不同,也带来了一些差别。
1) 逐行扫描方式是从上到下逐步实现严密覆盖所有区域;回扫扫描方式是首先实现覆盖全部区域,然后通过回扫实现严密覆盖。前一种扫描方式按照严密覆盖的标准逐步实现覆盖所有空域;后一种则是首先尽快实现全区域的覆盖,然后再实现区域内的严密搜索。也就是说,如果将雷达扫描任务分为“严密”和“覆盖”两个方面,那么逐行扫描方式是两者同时进行,而回扫方式则侧重于先“覆盖”,后“严密”。
2) 对于机械扫描雷达来说,总路径长度稍有不同。回扫扫描方式相对于逐行扫描方式来说,有一段返回的路径4,使得总体路径长度稍长,这会在一定程度上增大扫描周期。但是对于电子扫描雷达来说,由于路径的变换可以瞬时完成,并不会增加返回路径,也就不会增大扫描周期。
2 雷达单次扫描发现目标概率模型
雷达波束扫过目标之后,是依靠在噪声杂波干扰背景下检测目标回波的方法,实现对目标的检测发现的,如图4所示。
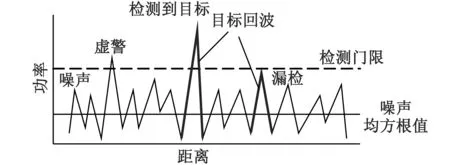
图4 目标回波检测Fig.4 Target echo detection
在噪声中检测目标回波,一般都是通过设定一个检测门限,把超过门限的回波当作目标回波来处理。这样对应地,把超过检测门限的噪声错误地当成目标回波称为虚假检测或虚警;把没有超过检测门限,未检测到的目标回波称为漏检。可以看出,当确定检测门限后,雷达波束扫描到目标后并不是一定能够发现目标,而是存在一定的检测概率。
雷达波束内的检测概率除了受雷达本身系统参数如天线增益、功率、损耗等影响,还与目标反射信噪比有关。一般认为雷达波束中心检测概率最高,偏离波束中心角度越大,检测概率越低,波束边缘的检测概率最低。为了能够定量分析,假设雷达波束内的检测概率为检测点偏离波束中心角度的一个指数函数
P(r)=abr+c
(1)
式中:r为检测点处偏离波束中心的角度;a,b,c为检测概率函数的待求参数。
假设某雷达波束半径为5°,雷达波束中心的检测概率为80%;有效波束边缘,即偏离波束中心5°位置的检测概率为50%,偏离波束中心4°位置的检测概率为75%。容易求得a=-3.870 984×10-5,b=5.996 132,c=0.800 038 7。
雷达目标检测发现概率函数如图5所示。

图5 雷达目标检测发现概率函数
3 基于蒙特卡罗方法的检测发现模型
3.1 相关概念
1) 发现时间td:即以雷达1个扫描周期开始时刻为起始点,雷达在周期内首次发现扫描空域内某一目标的时间。
图6所示为首次发现时间示意图。

图6 首次发现时间示意图Fig.6 First discovery time
如图6所示,在雷达1个扫描周期内,从该扫描周期开始时刻,波束由左至右移动扫描时,会第1次扫过目标点。由于扫描波束有相互重合,如果目标在重合区域内,雷达波束会第2次扫过目标点。前文有述,雷达波束发现目标是一个概率性事件。如果第1次扫过目标后就发现了目标,发现时间td就是该次扫过目标的时间;如果第1次扫过目标后没有发现目标,第2次扫过目标时才发现目标,则发现时间td就是第2次扫过目标的时间;当然也有可能两次扫描都没有发现目标。
2) 期望发现时间tm:因为目标点可能会出现在扫描区域的任何一个地方,假设目标点在扫描区域出现的位置坐标服从二维均匀分布,并假设经过雷达波束在1个周期内的扫描后能够发现该目标,则雷达波束对于该目标的发现时间的数学期望称为期望发现时间tm。
不难分析出,在目标点出现在扫描区域的位置分布和雷达单次扫描发现目标概率确定的前提下,一旦扫描方式确定,则tm也将确定。
某种扫描方式tm越小,就表示该种扫描方式发现目标的平均时间越短。从统计学角度来说,也就等效于该种扫描方式能更“早”发现目标。
3.2 问题分析
分析两种四行扫描方式的特点,逐行扫描方式是逐步实现“严密”和“覆盖”,回扫扫描方式是先实现“覆盖”再实现“严密”,这势必会对雷达在1个周期内对目标的发现时间td产生影响。
如图6所示,为方便描述,使用扫描行数中心线将扇形区域分割成5层,从上往下依次定义为第1~5层。图6中,当目标位于第2层时,对于逐行扫描方式和回扫扫描方式,首次扫描覆盖目标的时间是相同的。如果首次扫描到目标就发现该目标,则发现时间td相同。如果首次扫描到目标而没有发现该目标,在该扫描周期内还会有另一次扫描到该目标的时机。但是显然,对于这个目标,逐行扫描方式第2次扫描到的时间相对于回扫扫描方式更早。因为逐行扫描方式的路径是扫描完第1次之后,紧接着就能返回扫描到该目标。而回扫扫描方式则需要等到扫描完第3行后再返回到第2行扫描才能扫描到这个目标。此时,逐行扫描方式的发现时间td更小。
可以想象,在首次扫描即能发现目标的条件下,如果目标位于搜索扇形区域的上半侧,逐行扫描方式发现时间td更小,意味着能够更快发现目标。如果目标位于搜索扇形区域的下半侧,逐行扫描方式发现时间td相对于回扫扫描方式来说会更大,意味着发现目标时间更长。
对于一个确定位置的目标,可以通过分析两种扫描方式的发现时间td来评价两种扫描方式的优劣。当目标位置不确定时,可以使用期望发现时间tm来评价。
3.3 蒙特卡罗方法比较分析
在扇区搜索范围内按照二维均匀分布随机产生一定数量的目标。对于每一个目标点,分别按照两种扫描方式计算扫描到的时间。
假设目标点坐标为(x,y),x表示横轴坐标,y表示纵轴坐标。为简便起见,假设扇区搜索区域为方位角[-φ,φ],俯仰角[0°,θ],x∈[-φ,φ],y∈[0°,θ]。
设机械雷达扫描速度为Va,则易得雷达扫描完方位角[-φ,φ]所用时间Th,即
(2)
雷达行与行之间切换时,也需要耗费在俯仰方向的扫描时间。则雷达相邻行俯仰方向扫描时间Tf为
(3)
另设雷达调整扫描方向时停留时间为Ta,则可以根据目标点坐标(x,y),计算逐行扫描方式下的首次扫描时间T11,即

(4)
式(4)是一个分段函数。式中,「y/5⎤为向上取整函数,判断出目标处于整个扇形扫描区域的层数。该分段函数中的每段函数为4项时间之和,其中:第1项为扫描路径已经扫过的整行所消耗的时间;第2项为改变方向停留的时间;第3项为雷达俯仰方向上移动消耗的时间;第4项为方位上移动到目标点所消耗的时间。
同样可以得到,逐行扫描方式下,第2次扫过目标时间T12为
(5)
回扫扫描方式下,首次扫描时间T21为
(6)
回扫扫描方式下,第2次扫过目标时间T22为
(7)
每次扫描过目标发现的概率按照式(1)进行解算,其中r取值为
(8)
(9)
(10)
(11)
式中:r11和r21分别表示逐行扫描方式和回扫扫描方式下首次扫描到目标时,目标偏离波束中心的角度;r12和r22分别表示逐行扫描方式和回扫扫描方式下第2次扫描到目标时,目标偏离波束中心的角度。
当确定目标在扇形区域中坐标后,可根据以上算式求出两种扫描方式下首次扫描时间和发现概率、第2次扫描时间和发现概率。使用逐行扫描方式时,具体数据处理流程为:
1) 随机生成x∈[-φ,φ],y∈[0°,θ]的二维均匀分布目标坐标(x,y);
2) 计算T11及发现概率P(r11);
3) 生成[0,1]均匀分布随机数P1;
4) 如果P1≤P(r11),认定为首次扫描目标即发现目标,发现时间为T11,记录发现时间,转至8),如果P1>P(r11),认定为首次扫描到目标时没有发现目标;
5) 计算T12及发现概率P(r12);
6) 生成[0,1]均匀分布随机数P2;
7) 如果P2≤P(r12),认定为第2次扫描到目标时发现目标,发现时间为T12,记录发现时间,转至8),如果P2>P(r12),认定为没有发现目标,直接转至8);
8) 结束。
同理,针对目标位置点,使用回扫扫描方式时,也可按照以上8个步骤进行处理。
对于随机生成的1个目标点,经过以上8个步骤,可以得出对该目标的发现情况和发现时间。使用蒙特卡罗方法,重复以上步骤N次,最终可求得针对N个目标点的发现个数及每个目标的发现时间。当N足够大时,通过对发现时间进行期望求解,就可得出两种扫描方式下对目标的期望发现时间tm。
4 仿真及结果分析
4.1 仿真1
假设某机械扫描雷达,其扇区搜索区域为方位角[-60°,60°],俯仰角[0°,25°],扫描速度为60 (°)/s,调整扫描方向时停留时间为0.1 s,并假设雷达目标检测概率符合图5所示规律。随机产生10 000个目标数据,在探测区域范围内分布如图7所示。
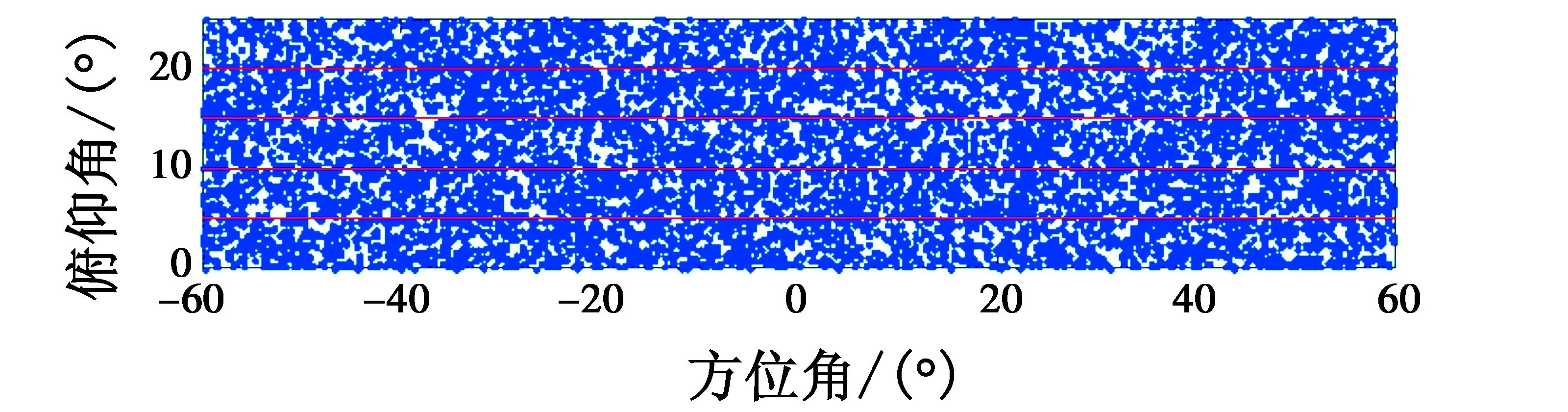
图7 目标随机出现在探测区域内Fig.7 Random target in detection zone
图8所示为1个周期扫描所发现的目标。

图8 1个周期扫描所发现的目标Fig.8 Target detected in one scanning period
使用逐行扫描方式,经过1个周期扫描后,被发现目标如图8(a)所示。使用回扫扫描方式,经过1个周期扫描后,被发现目标如图8(b)所示。图中,红色目标点是1个周期扫描后被发现的目标,蓝色目标点表示没有发现目标。
经过仿真统计,使用逐行扫描方式,1个扫描周期共发现8994个目标,平均发现时间为4.043 s;对同样的10 000个目标,使用回扫扫描方式,1个扫描周期共发现9001个目标,平均发现时间为3.829 s。也就是说,同样条件下,回扫扫描方式期望发现时间tm比逐行扫描方式少约0.214 s,也即在统计意义上使用回扫扫描方式能更快发现目标。
4.2 仿真2
假设某电子扫描雷达,其扇区搜索区域为方位角[-60°,60°],俯仰角[0°,25°],扫描速度为60 (°)/s,可瞬间调整扫描方向。并假设雷达目标检测概率符合图5所示规律。
经过仿真统计,使用逐行扫描方式,1个扫描周期共发现8997个目标,平均发现时间为3.612 s;对同样的10 000个目标,使用回扫扫描方式,1个扫描周期共发现8988个目标,平均发现时间为3.360 s。也就是说,同样条件下,回扫扫描方式期望发现时间tm比逐行扫描方式少约0.252 s,也即在统计意义上使用回扫扫描方式能更快发现目标。
通过以上两个仿真可以看出,雷达在1个扫描周期内,回扫扫描方式在统计意义上要比逐行扫描方式更具有提前发现目标的优势。产生这个优势的原因是:回扫扫描方式是首先以较大的目标检测概率实现了区域的覆盖,然后通过回扫实现对漏检目标的重新扫描发现。从统计意义上来说,这种方式有较大概率能更快发现目标。
5 小结
机载火控雷达扇区搜索四行扫描通常采用逐行扫描方式。本文通过蒙特卡罗仿真方法,假设目标可能出现在搜索扇区的任一位置,通过统计的方法得出,在1个雷达扫描周期内,采用回扫扫描方式可以在统计意义上更快发现目标,这对于当前在有外部信息支援和引导情况下,“开雷达就尽快锁定目标,锁定目标就尽快发射导弹”的中距空战作战样式非常重要。
