具有避碰和保持连通的多智能体鲁棒编队控制
2022-08-11张志雄杨凯军
张志雄, 杨凯军
(陕西科技大学电气与控制工程学院,西安 710000)
0 引言
近年来,多智能体系统在工业制造、航空航天以及军事作战等领域表现出巨大潜力,逐渐成为计算机科学、控制理论与人工智能等领域研究的热点,如围堵控制[1]、编队控制[2]、共识控制[3]和交会控制[4]等。
编队控制的目的是通过控制具有一定执行和信息交互能力的智能体运动使多智能体系统跟踪参考编队队形。多智能体系统编队控制在移动机器人[5]、无人机(UAV)[6]和自主水下航行器(AUV)[7]等领域有着广阔的应用前景。
根据给定计算资源和通信环境的不同,多智能体编队控制可分为集中式[8]和分布式[9]两种控制策略。集中式策略通过含有环境和智能体信息的中央控制单元来控制智能体形成编队,但是存在编队规模小、容错率差和缺乏灵活性等不足。相比于集中式的控制策略,在分布式控制策略中每个智能体只接收其相邻智能体的相关信息,所以分布式控制策略的可扩展性和灵活性更高,计算效率更高。常用的分布式编队控制策略主要有领导跟随法[10]、虚拟结构法[11]和基于行为的方法[12]。相较于其他两种方法,领导跟随法不仅能够在静态环境中保持编队控制的准确性和稳定性,而且也能在动态环境下获得期望编队队形。
受环境因素的制约,多智能体编队在执行任务的过程中,不可避免地出现智能体之间的碰撞和通信中断现象,所以,如何既能合理地避免这些情况又能最大限度地保持编队队形,是多智能体编队控制的重点研究方向之一。常用的避碰技术主要有基于优化的方法[13]和人工势场法[14]。相较于基于优化的方法,人工势场法的避碰算法通过设计排斥势函数和吸引势函数来实现避碰,具有控制器设计简单、更新参数少、实时避碰且路径平滑的优点。人工势场法的基本思想是将多智能体系统所处的环境看作混合势力场,智能体之间因为距离变化而产生斥力和引力,由斥力和引力的合力决定智能体的前进方向[15]。智能体间的通信会受相邻智能体距离和外部噪声[16]的影响,相邻多智能体之间的距离过远会导致信息传输失败,甚至影响多智能体系统编队的实际效果。所以在设计人工势场函数时,不仅要考虑智能体避碰区域的最小半径,还要考虑智能体信号检测区域的半径。文献[17]在设计控制器时,只考虑了编队控制和避碰控制,而忽略了智能体之间的连通性。
基于上述论述和文献[18],本文提出了具有避碰和保持连通的多智能体鲁棒编队控制协议,其目标是控制多智能体系统在保证智能体之间的避碰和连通性前提下形成期望编队,然后以特定的编队队形跟踪领导者的轨迹。仿真结果表明,本文设计的控制协议具有良好的鲁棒性以及保证避碰和连通性的效果。
1 准备工作
首先用图论来描述二阶非线性多智能体系统的通信拓扑,然后介绍相关引理和定义。
1.1 通信拓扑
L=D-A
(1)
式中,矩阵D=diag(d1,…,dn)。
跟随者与领导者之间的通信权值矩阵用B表示,定义矩阵B=diag(b1,b2,…,bn)。当且仅当跟随者i能够接收到领导者信息时,bi>0。在编队中必须保证至少有一个跟随者能够接收到领导者信息,因此b1+…+bn>0。
1.2 预备引理
定义1记Zn={ai∈Rn×n:ai≤0}表示实矩阵集合,并且非对角元素都是非正的。如果存在一个矩阵A满足A∈Zn并且A中的所有特征值都有正的实部,则称非奇异矩阵A为M矩阵。
引理1[19]若A∈Zn,那么下面的表述是等价的:
1) 矩阵A是一个M矩阵;
2) 矩阵A可以写成A=ηIn-B,其中,B≥0,η>max1≤i≤n|λi(B)|;
3) 存在正定的对角矩阵Λ=diag(ξ1,…,ξn),满足ΛA+ATΛ>0;
4) 存在一个正向量x∈Rn,满足Ax>0。
引理2[20]对于一个非负矩阵C=(ci j)n×n,存在两个实向量x=[x1,…,xn]T和y=[y1,…,yn]T,有
(2)
引理3(Schur补引理)[21]

1)S≻0;
2 问题的描述
本章将介绍二阶非线性多智能体系统的动力学和避碰、连通性的模型。
2.1 系统描述
考虑二阶非线性多智能体系统中跟随者i的动力学模型为

(3)
式中:xi(t)∈Rm,表示跟随者i的位置;vi(t)∈Rm,表示跟随者i的速度;ui(t)∈Rm,表示跟随者i的控制输入;fi(xi(t),vi(t))∈Rm,表示跟随者i动力学行为的非线性项;di(xi(t),vi(t))∈Rm,表示跟随者i受到的外部干扰。
领导者的动力学模型为
(4)
式中:x0(t)∈Rm,表示领导者的位置;v0(t)∈Rm,表示领导者的速度;f0(x0(t),v0(t))∈Rm,表示领导者动力学行为的非线性项。
本文的控制目标是通过设计具有避碰和保持连通的鲁棒编队控制律,控制二阶非线性多智能体系统在保证智能体之间的避碰和连通性的前提下形成期望编队,然后以特定的编队队形跟踪领导者的轨迹。当编队形成时,领导者与跟随者之间的相对位置和速度应当满足
(5)
式中,χi∈Rm,表示在参考编队中跟随者i与领导者的相对位置。当多智能体系统形成编队时,跟随者与领导者之间的位置差将收敛到一个由参考编队给定的期望值,并且跟随者彼此之间保持理想的相对位置状态跟踪领导者的轨迹和速度。
2.2 避碰和连通性
为了实现智能体之间的避碰和通信畅通,在智能体的可行空间中利用人工势场法建立合适的势函数,驱使智能体沿着势函数的负梯度方向移动,直到完成控制目标。具体来说,就是将每个智能体看作一个高势场,当其他智能体与其之间的距离较小或较大时,2个智能体之间会产生排斥力或者吸引力,驱使智能体相互远离或者靠近,最终达到保证避碰和连通的目的。
图1所示为智能体的避碰和保持连通区域。
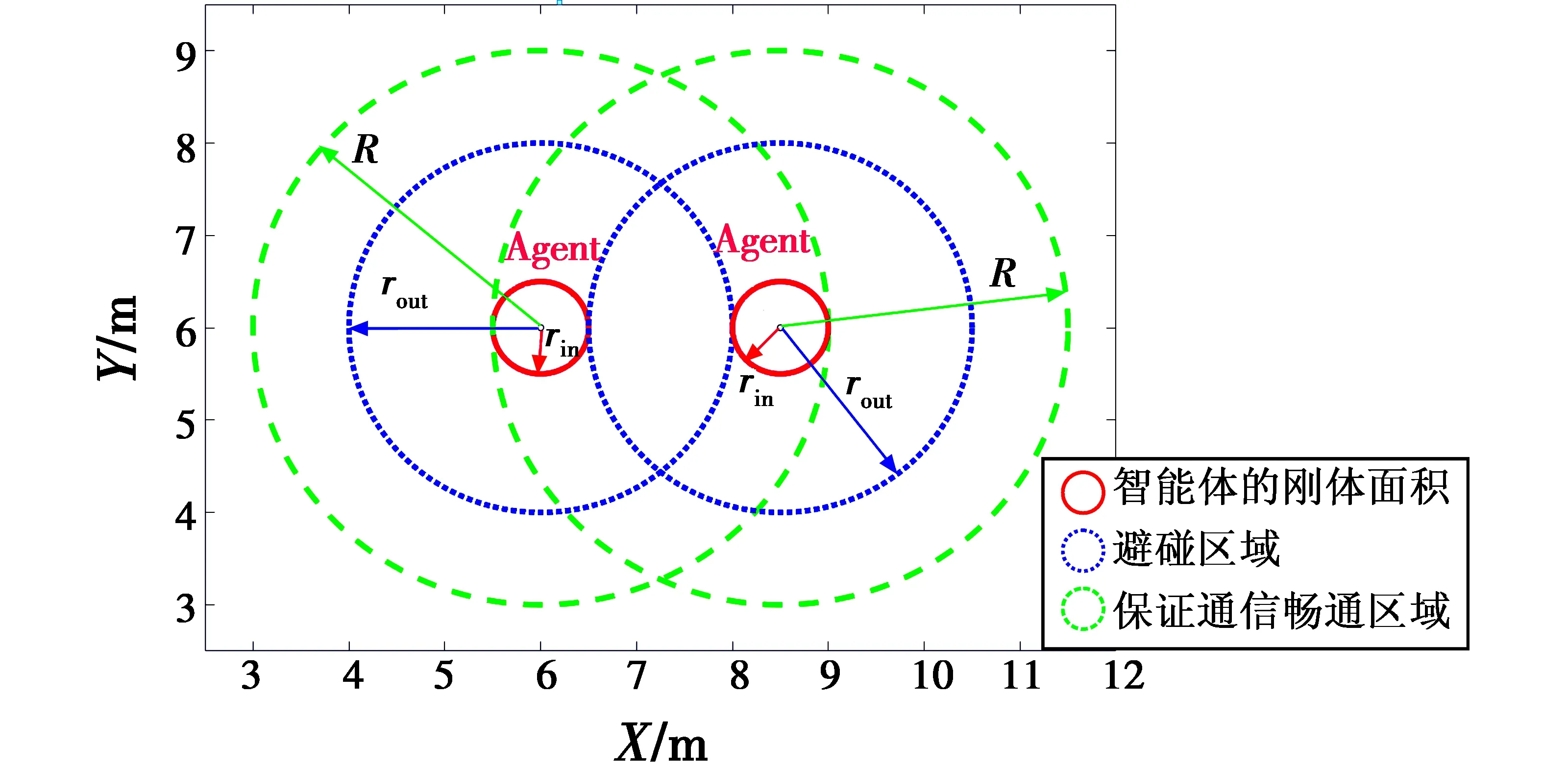
图1 智能体的避碰和保持连通区域Fig.1 Collision avoidance and connection preservation regions of the agent
如图1所示,基于人工势场法为每个智能体(Agent)定义了3个固定的圆形区域:智能体的刚体面积、避碰区域和保证通信畅通区域。当其他智能体进入避碰区域时,触发斥力函数使有碰撞倾向的智能体相互排斥,达到避碰效果;而当相邻2个智能体之间的距离即将达到智能体的通信半径时,触发引力函数驱使2个有通信中断趋势的智能体相互吸引,从而保证智能体之间信息畅通。考虑到智能体的刚体面积和物理惯性,用rin表示智能体的刚体半径,rout表示斥力场作用范围,R表示智能体的引力场范围。
3 编队控制律设计以及系统的稳定性分析
为了实现具有避碰和保持连通的领导跟随鲁棒编队控制,分别采用分布式控制法和人工势场法设计编队控制律以及避碰和保持连通控制律。
3.1 避碰和连通性
由跟踪误差式(5)可知,编队控制包括由领导者和跟随者的状态决定的位置差和速度差两个协同变量,为了使个体的协同变量达到一致,基于一致性算法设计的分布式编队控制项为
(6)

智能体i和j之间的距离满足||
xi j||
=||
xi-xj||

基于人工势场法设计一个斥力函数φr(||
xi j||
)来保证智能体i在进入到智能体j的避碰区域后会受到排斥力,使智能体i向远离智能体j的方向移动,从而实现智能体之间的避碰。斥力函数构造如下
(7)
则智能体i的避碰控制项为φr(||
xi j||
)的负梯度导数
(8)

保证连通性控制的目标是使相邻的智能体之间的距离始终满足||
xi j||
∈(rout,R)。考虑到智能体在期望编队中的相对位置,引力函数设计为
(9)

智能体i的保证连通性控制输入为φR(||
ei j||
)的负梯度导数,定义为
(10)
基于式(6)、式(8)和式(10),由线性叠加原理可得,具有避碰和连通性的领导跟随鲁棒编队控制律为

。
(11)
3.2 稳定性分析与证明
本节主要研究由式(3)和式(4)定义的二阶非线性多智能体系统的稳定性。领导跟随多智能体闭环系统定义为
(12)
为了解决编队控制中智能体的非线性动力学项和受到的有界噪声对系统的影响,则针对式(12)闭环系统做如下两个假设。
假设1 假设式(12)中的非线性函数fi(xi(t),vi(t))动态地满足Lipschitz条件,即∂fi/∂xj是连续可微的函数向量,则存在非负常数矩阵P=(pi j)n×n和Q=(qi j)n×n满足

(13)
假设2 假设多智能体系统中不确定的外部干扰di(xi(t),vi(t))是有界的,所以存在一个已知的函数D(·)满足di(xi(t),vi(t))≤Di(xi(t),vi(t))。
注1 在多智能体领域中,干扰有界是很常见的假设。比如在实际应用中遇到的常值干扰、谐波干扰等多种干扰都满足这种假设。
下面将用李雅普诺夫定理来分析式(12)系统的稳定性。首先构造一个李雅普诺夫候选函数
(14)

(15)
基于假设1,记

(16)

(17)
对式(14)中的V(t)求导,可得

(18)

(19)

(20)
从式(20)可以看出,通过假设1和引理2成功地将多智能体系统中复杂的不确定的非线性问题转化为简单的确定的线性问题,提高了系统的鲁棒性。结合式(20),式(19)可以写为

(21)


。
(22)
由人工势场函数和拉普拉斯矩阵的性质,式(22)的上界为

(23)

从上式可知,存在大于零的常数γ和θ满足

(24)

(25)
综上所述,若假设1和假设2成立,则根据李雅普诺夫定理可以判定式(12)二阶非线性多智能体系统是稳定的,并且系统在式(11)控制协议的作用下可以形成具有避碰和保持系统连通的领导跟随编队并保持参考编队队形跟踪领导者的轨迹和速度。
注2 与其他文献中关于多智能体编队的算法相比,本文设计的控制策略不仅考虑了多智能体系统的非线性和智能体之间的避碰,还解决了往往被忽略的通信连通问题,具有极大的现实意义。
4 仿真结果
通过对包含10个智能体的多智能体系统进行数值仿真,验证了本文所提鲁棒编队控制律的有效性。
多智能体系统的通信拓扑结构如图2所示,其中,0为领导者,1~9为跟随者。只有跟随者1,2和3能够和领导者通信。

图2 多智能体系统的通信拓扑结构Fig.2 Communication topology of MASs
系统的动力学模型由式(3)和式(4)给出,m=2,智能体的外部干扰项为di(xi(t),vi(t))=[2cos(1.5vi1(t)),2sin(vi2(t))]T,内部的非线性动力学定义为:
本文设计了较为复杂的领导者轨迹方程:[x01(t),x02(t)]T=[cos(0.25v01(t)),100sin(0.01x01(t))]T;在期望编队中,跟随者和领导者的相对位置由χi=48·[cos(2(i-1)π/9),sin(2(i-1)π/9)]T定义。
基于通信拓扑图和鲁棒编队控制律,多智能体系统最终形成了以领导者为圆心,跟随者都在圆上的编队,如图3所示。
由图3绘制的多智能体系统的轨迹和编队形成过程可以清楚地看到,多智能体系统在一定时间内形成期望编队,然后以特定的编队队形跟踪领导者的轨迹,并且保证智能体之间的避碰和连通性。
图4绘制了所有跟随者与领导者之间的距离随时间的变化,结果表明,所有的距离都收敛到编队期望||χi||2。图5描述了任意2个智能体之间的距离随时间的变化,满足避碰和连通性的要求。

图3 多智能体系统的轨迹Fig.3 Trajectory of MASs
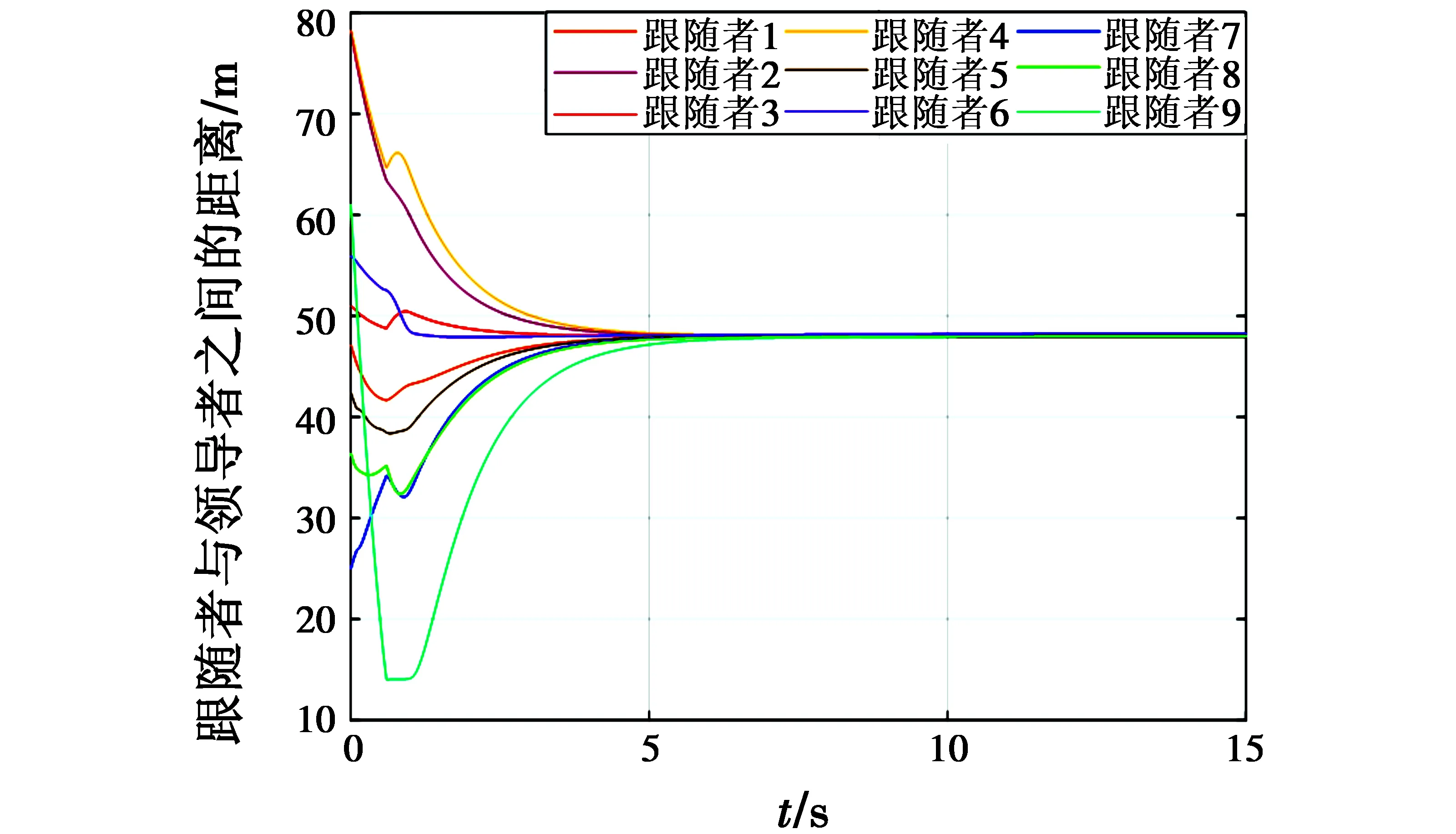
图4 跟随者与领导者之间的距离Fig.4 Distance between followers and leader
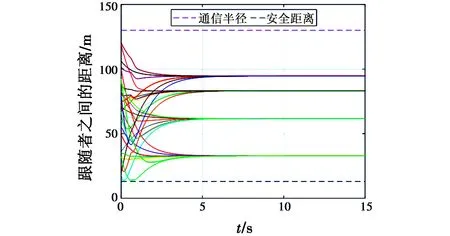
图5 跟随者之间的距离Fig.5 Distance between followers
图6绘制了所有跟随者和领导者在水平方向和竖直方向上的速度差,可以看出,速度差都收敛到零,说明跟随者可以跟踪领导者的速度。
最后,每个跟随者分别在水平方向和竖直方向上的控制输入如图7所示,在系统形成编队之后,只需少量的控制输出就可以维持多智能体系统的编队队形,从而节省控制器的设计成本。
仿真结果表明,通过本文设计的鲁棒编队控制律可以解决多智能体系统中存在未知的非线性项和外部干扰对编队控制的影响,使跟随者与领导者之间的位置和速度误差以相当高的精度趋近于零,并实现避免碰撞和保持系统连通性的目的。
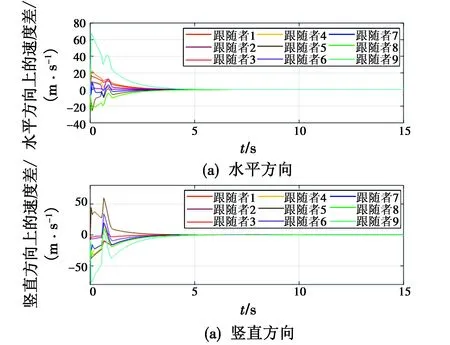
图6 跟随者和领导者在水平和竖直方向上的速度差Fig.6 Velocity difference between followers and leader in horizontal and vertical directions
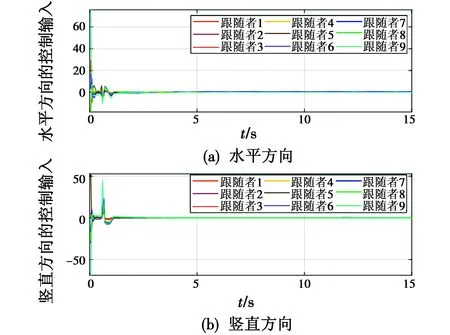
图7 跟随者在水平和竖直方向上的控制输入Fig.7 Control inputs for the followers in the horizontal and vertical directions
5 结论
本文研究了存在外部干扰的具有避碰和保持系统连通的二阶非线性多智能体的鲁棒编队控制问题。利用分布式控制策略和人工势场法设计鲁棒编队控制器,解决了多智能体系统在形成编队时的领导跟随、易发生碰撞和系统连通性的问题,并通过理论分析证明了系统的稳定性。最后,用仿真实例验证了算法的有效性。
