面向低频振荡分析的直驱风电机组阻尼转矩建模
2022-08-09彭技礼严干贵翟文超沈墨涵
彭技礼,贾 祺,严干贵,刘 侃,翟文超,沈墨涵
(1. 现代电力系统仿真控制与绿色电能新技术教育部重点实验室(东北电力大学),吉林吉林 132012;2. 国网辽宁省电力有限公司电力科学研究院,辽宁沈阳 110006)
0 引言
“双碳”目标驱动下,可再生能源迅速发展。截至2020 年底,我国风电累计装机容量达2.28×108kW,均居世界第一位[1]。根据远景目标,2050 年风电累计装机容量将达到2.4×109kW[2]。大规模风电经长输电线路并网,电网阻抗不可忽略,导致所接入的系统呈现弱交流电网特性。在弱交流电网条件下,风电机组并网点电压容易受到机组功率变化、电网强度变化而发生波动,破坏了理想并网点电压假设条件,进而影响机组的运行稳定性[3]。
由于风电机组呈现多时间尺度特征,在不同系统运行条件下,可能会诱发宽频带振荡现象,如次同步振荡、低频振荡等[4]。目前,国内外学者围绕弱交流电网下直驱风电机组低频振荡问题开展了卓而有效的研究工作[5⁃9]。文献[5]研究表明当直驱风电机组功角大于50°时,快速的锁相环(PLL)响应会减弱直流电压控制的稳定性。文献[6]研究表明无功控制的比例系数可以在很大的范围内变化而系统保持稳定,而积分系数的增大会弱化系统的稳定性。上述研究中基于时域仿真和特征值分析虽可以分析低频振荡特性及影响因素,但对于振荡的物理机理并未阐述清楚。文献[10⁃11]划分出电力电子化设备的多个时间尺度,建立了直流电压时间尺度下直驱风电机组线性化模型,提出了风电机组惯性、阻尼分量和同步分量等物理概念,基于对同步发电机组的惯性、阻尼转矩和同步转矩的概念的理解,揭示了直驱风电机组并网低频振荡是由阻尼分量不足引起的。研究结果表明:与直流电压控制环带宽相近的控制环路(锁相环控制、无功环控制)在高运行工况或低短路比的情况下会影响直流电压的稳定性;增加无功环控制带宽或者降低锁相环控制带宽,有利于增加直流电压控制的阻尼分量,提高直流电压的稳定性。文献[12]进一步建立了直驱风电机组幅相运动方程,讨论了不同电网强度、不同工作点以及不同锁相环控制参数对内电势稳定性的影响。研究结果表明:随着电网强度变弱或输出功率变大,锁相环对内电势稳定性的负面影响变大。然而,文献[7⁃13]大多围绕直驱风电机组中的直流电压环模式的稳定性展开研究,锁相环只是作为影响因素之一,其对锁相环模式下的稳定性考虑不足。此外,采用电压源型阻尼转矩模型进行研究,模型复杂,分析难度高且不利于拓展至多机系统。
本文以直驱风电机组接入弱交流电网作为研究对象,围绕直驱风电机组直流电压环、锁相环失稳问题展开研究。首先,建立直驱风电机组电流源型线性化模型,分析电网强度、运行工况以及控制参数对其稳定性的影响。然后,分别建立适用于直流电压环和锁相环稳定性分析的电流源型阻尼转矩模型,通过阻尼转矩法揭示直驱风电机组发生低频振荡的机理。对比文献[12]基于电压源属性构造的幅相运动模型,本文基于直驱风电机组电流源属性构造的阻尼转矩模型更为简单,更易于拓展分析。
1 直驱风电机组线性化建模
1.1 直驱风电机组结构
直驱风电机组的拓扑结构及控制系统如附录A图A1所示,其拓扑结构由风力机、机侧变流器、直流电容、网侧变流器、滤波电感、滤波电容组成。
图1 中交流电网强度一般用短路容量比Rsc描述,即交流电网短路容量Sac与直驱风电机组额定功率SN之比[13],如式(1)所示。

式中:UN为电网电压额定值;Z为电网阻抗。当Rsc<3时,系统为弱交流电网。
1.2 直驱风电机组线性化建模
针对直驱风电机组的低频振荡问题(1~10 Hz),建模过程进行如下假设[14]:不考虑交流侧滤波电容的影响;忽略机侧变流器的影响;变流器传输功率无损耗。
1.2.1 直流电容建模
直流电容的动态过程为:

式中:Udc为直流电容电压;C为直流电容的电容值;Pout为直流电容的输出有功功率;Pin为直流电容的输入有功功率。
式中:Utd、Utq分别为网侧变流器端电压的d、q轴分量;id、iq分别为网侧变流器输出电流的d、q轴分量;Idc0为风力机及机侧变流器的等效受控电流源输出电流。
1.2.2 网侧变流器及其控制器建模
直驱风电机组网侧变流器的拓扑结构如附录A图A2 所示,其数学模型如式(5)所示。网侧变流器的控制策略如附录A 图A3所示,有功功率控制采用定直流电压控制,直流电容电压的偏差经过比例积分(PI)环节生成d轴电流参考值;无功功率控制采用定端电压幅值控制,端电压的偏差经过PI 环节生成q轴电流参考值,其数学模型如式(6)所示。

式中:Ed、Eq分别为变流器出口电压的d、q轴分量;ω为系统频率;L为变流器出口滤波电感值;Ut为网侧变流器端电压;Utref为网侧变流器端电压基准值;Udcref为直流电容电压基准值;x1—x3、x5为状态变量;kp1—kp3、kp5分别为直流电压环控制、电流内环d轴控制、电流内环q轴控制和端电压控制的比例调节参数;ki1—ki3、ki5分别为直流电压环控制、电流内环d轴控制、电流内环q轴控制和端电压控制的积分调节参数。
1.2.3 锁相环控制器建模
锁相环的工作原理如附录A 图A4所示,图中dq轴为网侧变流器两相旋转坐标轴,xy轴为公共坐标系两相旋转坐标轴,其x轴与电网电压Ug的夹角始终保持不变。当锁相环实现精准锁相时,其d轴与端电压Ut方向一致,此时Utd=Ut,Utq=0。
对附录A 图A5 所示的锁相环控制策略建模,具体如下:

式中:kp4、ki4分别为锁相环PI控制的比例、积分系数;xpll为锁相环状态变量;θpll为锁相环输出的角度。
1.2.4 交流系统建模
交流系统模型如式(8)所示。
式中:Xg为电网电抗值;Utx、Uty分别为网侧变流器端电压的x、y轴分量;Ugx、Ugy分别为电网电压的x、y轴分量。
此外,根据图A4所示的锁相环工作原理中的相位关系,网侧变流器的端电压和变流器输出电流的d、q轴分量Utd、Utq和id、iq与公共坐标系下x、y轴分量Utx、Uty和ix、iy满足如下关系:
综上,式(2)—(9)构成了直驱风电机组接入交流系统的电流源型数学模型,联立式(2)—(9)在平衡点处进行一阶泰勒展开得到直驱风电机组联网线性化模型,其状态空间方程形式如式(10)所示。

式中:Δx为系统的状态向量;Δu为系统的输入向量;A、B分别为系统的状态矩阵和输入矩阵。当矩阵A中的特征值包含具有正实部的特征值时,系统失稳,且特征值向实轴正方向移动时,系统稳定性降低。
1.3 模型验证
为验证线性化模型的有效性,在MATLAB/Simu⁃link 软件中搭建线性化模型,在EMTDC/PSCAD 软件中搭建如附录A 图A1所示的电磁暂态仿真模型,施加相同的扰动,观察二者响应曲线的吻合度。系统参数如附录A 表A1 所示,在13 s 时加入0.01 MW功率扰动,在14 s 时加入-0.01 MW 功率扰动,线性化模型与时域仿真模型的响应曲线对比如附录A 图A6 所示。基于Prony 方法可知,线性化模型的主导特征根的几何距离误差为3.9%,即本文建立的线性化模型能较好地反映系统动态过程。
2 特征值分析
2.1 参与因子分析
当Rsc=1.5 时求得系统的特征值如表1 所示。由表可知,系统特征值中包含2 个低频振荡模式(λ1,2、λ3,4)、1 个衰减模式(λ5)以及2 个高频振荡模式(λ6,7、λ8,9)。
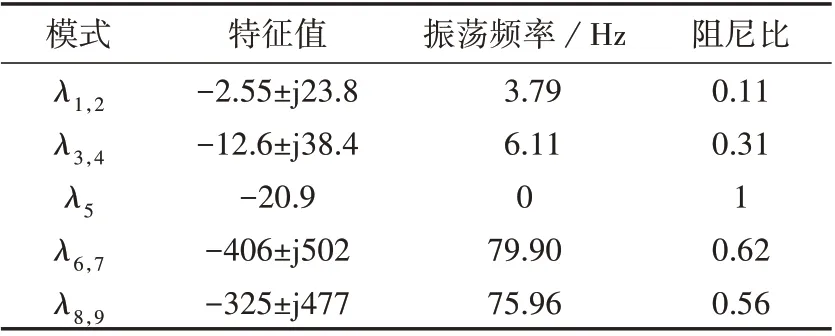
表1 系统特征值Table 1 Eigenvalues of system
对于低频振荡模式1(λ1,2),其参与因子见图1(a),该模式主要由直流电压环决定,同时还受锁相环和端电压控制的影响,下文称之为直流电压环模式。对于低频振荡模式2(λ3,4),其参与因子见图1(b),该模式主要由锁相环决定,同时还受直流电压环和端电压控制的影响,下文称之为锁相环模式。

图1 低频振荡模式的参与因子Fig.1 Participation factors of low-frequency oscillation modes
2.2 根轨迹分析
2.2.1 直流电压环模式的根轨迹分析
基于状态矩阵,进一步分析电网强度、直流电容输入功率Pin以及直流电压环控制参数kp1对直流电压环模式λ1,2的影响规律,其根轨迹如图2所示。
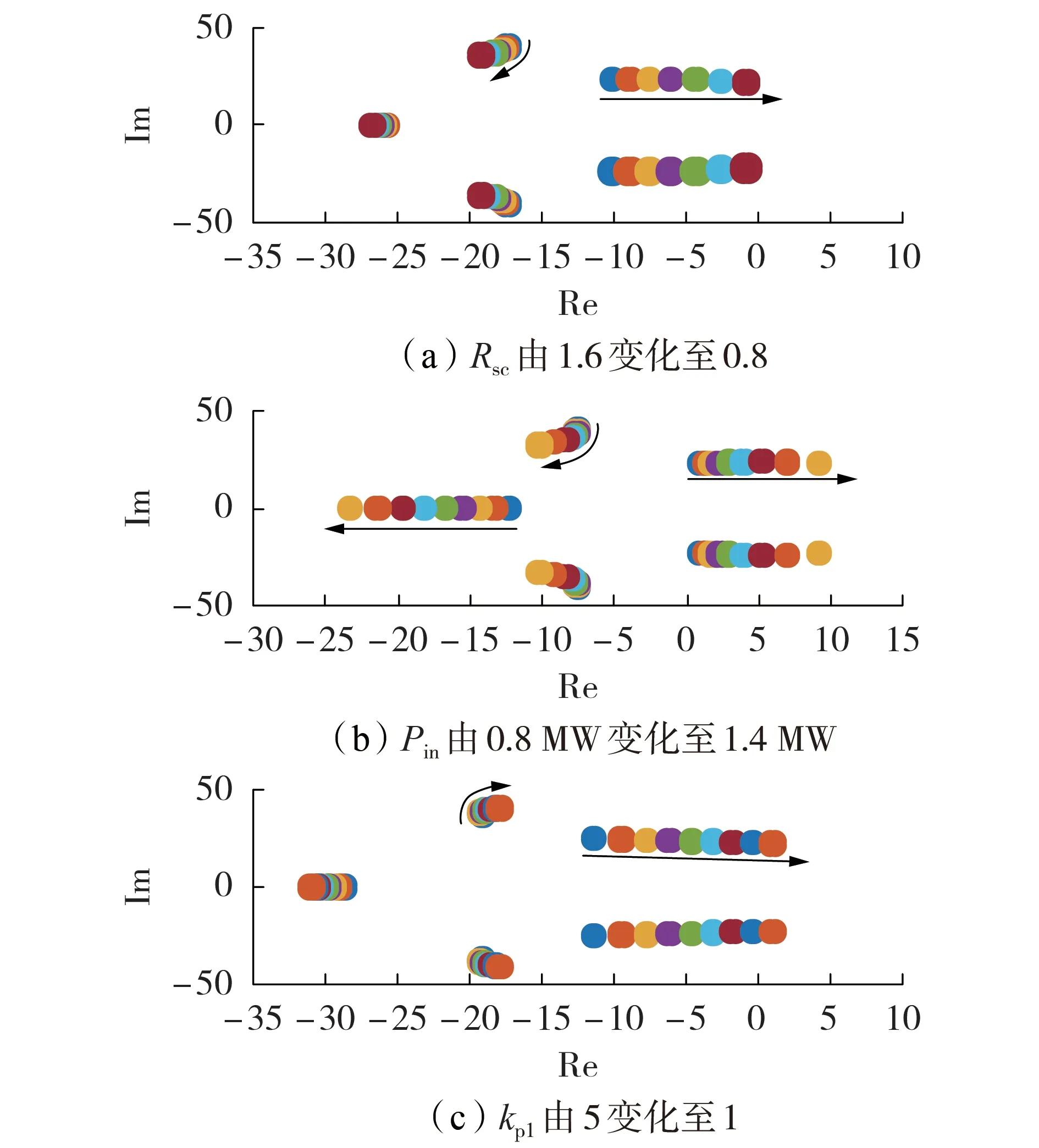
图2 直流电压环模式的根轨迹分析Fig.2 Root locus analysis of DC voltage loop mode
由图2(a)可知,随着电网强度的降低,λ1,2向实轴正方向移动,稳定性降低,当Rsc=1 时,λ1,2的实部为正,系统失去稳定。由图2(b)可知,随着Pin的增加,λ1,2向实轴正方向移动,稳定性降低,当直流电容输入功率达到1.2 MW 时,λ1,2的实部为正,系统失去稳定。由图2(c)可知,随着kp1由5 减小到1(控制带宽ωdc由10.5 Hz减小至7.5 Hz),λ1,2向实轴正方向移动,当kp1=2(ωdc=8 Hz)时,λ1,2的实部为正,系统失去稳定。即在本文算例中,当主导模式为直流电压环模式时,直流电压环带宽应远离8 Hz。
2.2.2 锁相环模式的根轨迹分析
基于状态矩阵A,进一步分析电网强度、直流电容输入功率以及锁相环控制参数kp4对锁相环模式λ3,4的影响规律,其根轨迹如附录A图A7所示。
由图A7(a)可知,随着电网强度的降低,λ3,4向实轴正方向移动,当Rsc=1 时,λ3,4的实部为正,失去稳定。由图A7(b)可知,随着直流电容输入功率的增加,λ3,4向实轴负方向移动,当直流电容输入功率达到1.2 MW 时,λ3,4的实部为正,失去稳定。由图A7(c)可知,随着锁相环比例参数kp4由16 减小到2(控制带宽ωpll由13.8 Hz减小至13.3 Hz),λ3,4向实轴负方向移动,当kp4=4(ωpll=13.4 Hz)时,λ3,4的实部为正,系统失去稳定。即在本文算例中,当主导模式为锁相环模式时,锁相环带宽应远离13.4 Hz。
3 电流源型阻尼转矩模型
3.1 阻尼转矩法的基本原理
阻尼转矩法于20世纪60年代首次提出,用于分析单机无穷大系统中励磁控制对低频振荡的影响[15⁃17],是一种基于质量块的转速-转矩响应特性来判定系统稳定性的线性化分析方法。针对质量块的固有振荡模式ω0,构建如图3(a)所示的阻尼转矩模型阻尼传递函数形式,并将其转速-转矩响应关系G(s)分解成阻尼系数和同步系数,建立如图3(b)所示的质量块的二阶运动形式,从同步系数K和阻尼系数D的角度分析其动态稳定性。

图3 质量块阻尼转矩模型Fig.3 Mass damping torque model
图3中:ΔTm为系统输入机械转矩;ΔTd为阻尼转矩;ΔTs为同步转矩[18⁃19]。其中,图3(a)中的阻尼传递函数G(s)与图3(b)中的同步系数K和阻尼系数D的关系如式(11)所示。

将s=jω0代入式(11)中,可求得同步系数K和阻尼系数D如式(12)所示。

由文献[18⁃19]可知:当K>0 且D>0 时,系统保持稳定运行;当K<0 时,系统发生单调失稳;当D<0时,系统发生负阻尼增幅振荡失稳。
3.2 阻尼转矩法在直驱风电机组中的应用
直驱风电机组的直流电压环模式反映的是直流电容稳定性,锁相环模式反映的是锁相环控制器稳定性。由式(2)和式(9)可知,其直流电容/锁相环动态方程与同步发电机组转子二阶运动方程在形式上具有高度的相似性,本节将围绕直驱风电机组的低频振荡模式,构建电流源型阻尼转矩模型,从同步系数和阻尼系数的角度出发揭示振荡机理。
3.2.1 直驱风电机组模型降阶
为简化分析,厘清各影响因素对低频振荡的贡献,对直驱风电机组的全阶模型进行简化[18],假设条件如下:机侧等效受控电流源输出电流值不变;电流环控制响应速度远快于直流电压环/锁相环控制响应速度,即在直流电压环/锁相环控制动作之前,电流已跟踪其基准值[15]。
基于上述假设条件,得到如附录B 图B1 所示的降阶模型,当Rsc=1.26 时求得降阶模型的特征值如附录B 表B1 所示,与表1 中的低频振荡模式基本一致,降阶模型与时域仿真的扰动响应对比如附录B图B2所示。
3.2.2 直流电压环的电流源型阻尼转矩模型
针对直流电压环模式,基于附录B 图B1 所示的电流源型降阶模型,将直流电容动态过程类比于转子动态过程,将其余环节类比于阻尼传递回路G(s),建立如图4 所示的直流电压环电流源型阻尼转矩模型,具体推导过程如附录C 所示。图中:Id0、Iq0分别为变流器输出电流初始值的d、q轴分量;Ut0为变流器端电压初始值;Gpll、J分别如式(13)、(14)所示。

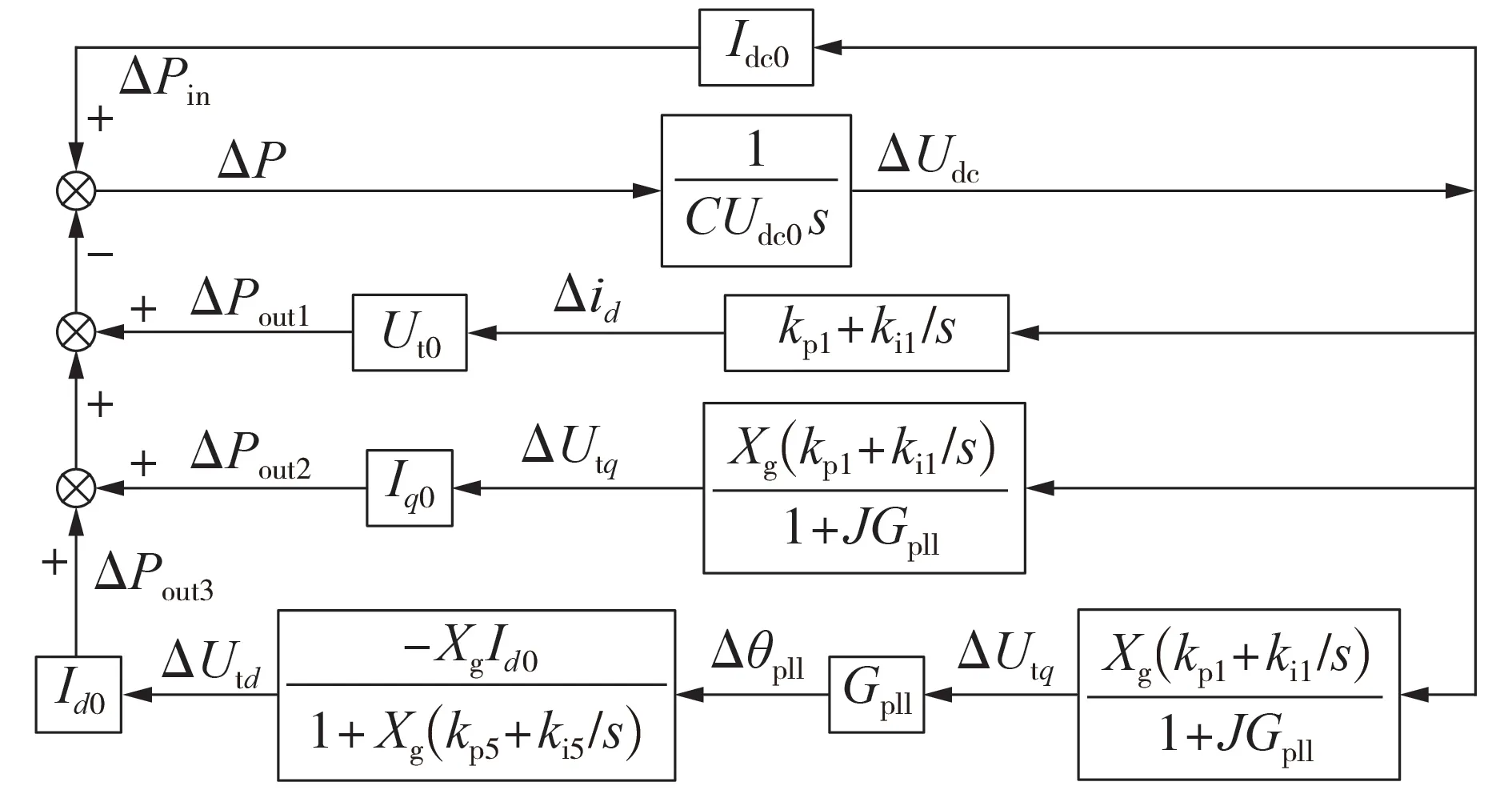
图4 直流电压环的电流源型阻尼转矩模型Fig.4 Current source damping torque model of DC voltage loop
由图4可得:

直流电压环的阻尼传递回路Gdc(s)、同步系数Kdc以及阻尼系数Ddc如式(19)所示。
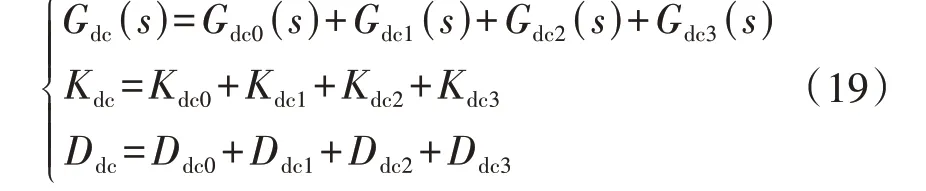
结合本文的算例条件,对式(15)—(19)进行分析可知:Gdc0(s)项体现了直流电容输入功率对直流电压环阻尼的影响,直流电容输入功率越大,等效电流源输出电流越大,即Idc0越大,提供的负阻尼越大;Gdc1(s)项体现了直流电压环比例参数kp1对阻尼的影响,且kp1越大,提供的正阻尼越大;Gdc2(s)项体现电网强度的影响,且电网强度越低,提供的负阻尼越大;而Gdc3(s)项体现了锁相环以及端电压对阻尼的影响,且提供的阻尼相对较小。
为进一步量化分析各影响因素对直流电压环同步系数和阻尼系数的影响,改变电网强度、直流电容输入功率以及直流电压环比例参数kp1,得到直流电压环同步系数和阻尼系数变化曲线如图5所示。

图5 直流电压环同步系数和阻尼系数曲线Fig.5 Curves of synchronization coefficient and damping coefficient for DC voltage loop
由图5 中的同步系数曲线可知:随着电网强度、直流电容输入功率、直流电压环比例控制参数变化,直流电压环同步系数变化较小,且都远大于0,远离失稳区域。由图5 中的阻尼系数曲线可知:随着电网强度的降低,阻尼系数不断减小,且当Rsc由1.1 降至1 时,阻尼系数由正变负,直流电压环模式失去稳定;随着直流电容输入功率的增加,阻尼系数不断减小,且当直流电容输入功率由1.1 MW增加至1.2 MW时,阻尼系数由正变负,直流电压环模式失去稳定;随着直流电压环比例参数不断减小,阻尼系数不断降低,且当kp1由2.5减小至2时,阻尼系数由正变负,直流电压环模式失去稳定。
3.2.3 锁相环的电流源型阻尼转矩模型
针对锁相环模式,基于附录B 图B1 所示的电流源型降阶模型,将锁相环动态过程类比于转子动态过程,将其余环节类比于阻尼传递回路G(s),建立如图6 所示的锁相环电流源型阻尼转矩模型,具体推导过程如附录C 所示。图中,K1、K2以及M分别如式(20)—(22)所示。

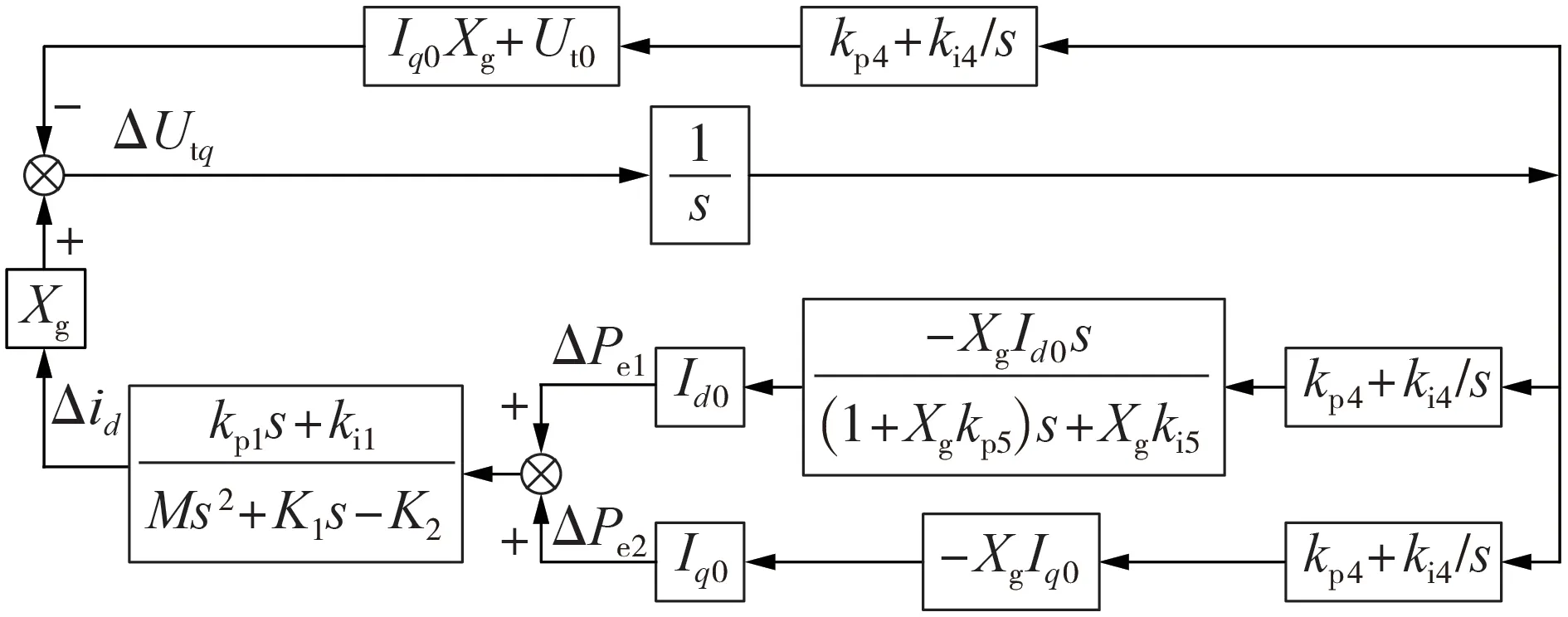
图6 锁相环的电流源型阻尼转矩模型Fig.6 Current source damping torque model of PLL
由图6可得:

锁相环的阻尼传递回路Gpll(s)以及同步系数Kpll和阻尼系数Dpll如式(26)所示。

结合本文的算例条件,对式(23)—(26)进行分析可知:Gpll1(s)项体现了锁相环比例参数kp4对锁相环阻尼的影响,锁相环比例参数kp4越大,提供的正阻尼越大;Gpll2(s)项体现了电网强度和直流电容输入功率对阻尼的影响,电网强度越低,直流电容输入功率越大,提供的负阻尼越大;Gpll3(s)项体现了电网强度对锁相环阻尼的影响,电网强度越低,提供的正阻尼越大。
为进一步量化分析各影响因素对锁相环同步系数和阻尼系数的影响,改变电网强度、直流电容输入功率以及锁相环比例参数kp4,得到锁相环模式λ3,4的同步系数和阻尼系数变化曲线如图7所示。
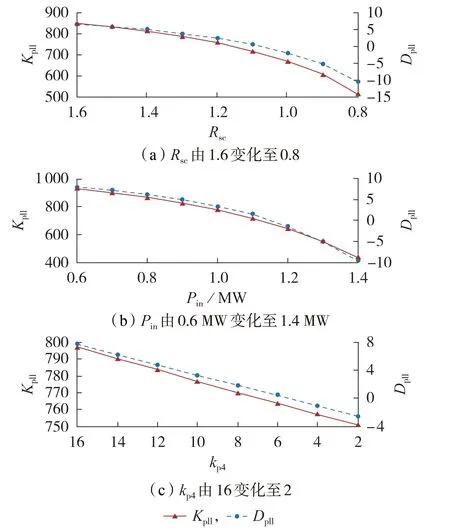
图7 锁相环同步系数和阻尼系数曲线Fig.7 Curves of synchronization coefficient and damping coefficient for PLL
由图7 中的同步系数曲线可得:随着电网强度、直流电容输入功率变化,锁相环同步系数变化较大;锁相环比例控制参数变化时,其同步系数变化较小;且同步系数始终保持远大于0,远离失稳区域。由图7 中的阻尼系数曲线可得:随着电网强度的降低,阻尼系数不断降低,当Rsc由1.1 降低至1 时,阻尼系数由正变负,锁相环模式失去稳定;随着直流电容输入功率的增加,阻尼系数不断减小,当直流电容输入功率由1.1 MW 增加至1.2 MW 时,阻尼系数由正变负,锁相环模式失去稳定;随着锁相环比例参数不断减小,阻尼系数不断减小,当kp4由6 减小至4 时,阻尼系数由正变负,锁相环模式失去稳定。
3.3 阻尼转矩法在多直驱风电机组并联系统中的应用
以附录D 图D1 所示的多台直驱风电机组并联接入弱交流电网为例,进一步探索阻尼转矩法在多机并联系统中的应用。直驱风电机组间耦合传递机制如附录D 图D2所示,各机组以并网点电压为输入量,以电流为输出量,各机组的输出电流波动叠加后与电网作用形成新的并网点电压扰动,反馈至各机组,形成新的输出电流波动,循环往复直至系统失稳或再平衡。
以直驱风电机组1 的直流电压环模式为研究对象,将系统其余部分视为阻尼传递回路,建立如图8所示的多机并联系统直流电压环阻尼转矩模型。图中:ΔP1为ΔUdc1经直驱风电机组1 作用(GPMSG1)后的功率增量;ΔPi(i=2,3,…,n;n为直驱风电机组数)为ΔUdc1经网络耦合、直驱风电机组i作用(GPMSGi(s))后的功率增量。GPMSG1(s)、GPMSGi(s)可分解为式(27)所示形式。

图8 多机并联系统直流电压环阻尼转矩模型Fig.8 Damping torque model of multi-machine parallel system DC voltage loop

式中:Di和Ki分别为直驱风电机组i作用的阻尼系数和同步系数。
因此,多机并联系统中的直流电压环同步系数Km和阻尼系数Dm可以表示为:

以3 机系统为例,分析电网强度、直驱风电机组1 直流电容输入功率以及直流电压环比例参数kp1对直驱风电机组1 直流电压环稳定性的影响规律,同步系数和阻尼系数变化曲线如附录D 图D3 所示。由图D3 中的同步系数曲线可知:直驱风电机组1 直流电压环的同步系数一直远离失稳区域。由图D3中的阻尼系数曲线可知:随着电网强度的减小、直流电容输入功率的增加以及控制参数kp1的减小,阻尼系数减小,变化趋势与3.2.2 节分析一致。对于锁相环模式,其建模与分析过程与其类似,不再赘述。
4 仿真验证
4.1 单机仿真验证
为验证理论分析的正确性,在PSCAD/EMTDC软件中搭建时域仿真模型。当系统主导模式为直流电压环模式,t=8 s 分别改变电网强度、直流电容输入功率、直流电压环比例参数kp1时,系统运行曲线如附录E 图E1 所示。当Rsc变为1.2 时,直流电容输入功率发生小幅度波动并迅速恢复稳定,当Rsc变为1 时,输出功率发生振荡,系统失去稳定;当直流电容输入功率由1 MW 增加至1.2 MW 时,系统失去稳定;当kp1变为2.5 时,系统保持稳定,当kp1变为2 时,输出功率在t=13 s出现振荡现象,并最终失去稳定。
当系统主导模式为锁相环模式,t=8 s 分别改变电网强度、直流电容输入功率、锁相环比例控制参数kp4时,系统运行曲线如附录E图E2所示。当Rsc变为1.6 时,输出功率发生小幅度波动并迅速恢复平稳,当Rsc变为1.3 时,输出功率发生较大幅度波动,并缓慢衰减,系统处于弱阻尼状态;当直流电容输入功率由1 MW 变为1.2 MW 时,系统失去稳定;当kp4变为8时,系统保持稳定,当kp4变为4时,输出功率在t=12 s出现振荡现象,并最终失去稳定。
4.2 多机仿真验证
搭建3 机并联系统的时域仿真模型,t=8 s 分别改变电网强度、直驱风电机组1 直流电容输入功率以及直流电压环比例参数kp1时,风电机组的直流电容输入功率曲线如附录E 图E3所示。由图E3(a)可知,当Rsc由1.2 减小至0.8 时,系统失去稳定;由图E3(b)可知,当直流电容输入功率由1 MW 增加至1.4 MW 时,系统失去稳定;由图E3(c)可知,当kp1由2.5减小至1时,系统失去稳定,并在t=15 s时出现功率振荡现象。
5 结论
为揭示直驱风电机组直流电压环模式和锁相环模式的失稳机理,本文建立了电流源型阻尼转矩模型,分析了电网强度、工况及控制参数对直驱风电机组低频振荡的影响,并将阻尼转矩法拓展至多机并联系统,得到主要结论如下。
1)高运行工况、弱电网强度以及不恰当的控制参数都会削弱直驱风电机组直流电压环或锁相环阻尼,当阻尼为负时,表现为直驱风电机组发生低频振荡。
2)随着电网强度的减小(Rsc由1.6 变为0.8),阻尼系数不断减少,在Rsc=1 时进入负半区,系统失去稳定;随着直流电容输入功率的增加(Pin由0.8 MW变为1.4 MW),阻尼系数不断减少,在Pin=1.2 MW 时进入负半区,系统失去稳定。
3)随着直流电压环比例参数不断减小(kp1由5变为1),直流电压环阻尼系数不断减少,在kp1=2 时进入负半区,直流电压环模式失去稳定,直驱风电机组发生低频振荡。
4)随着锁相环比例参数不断减小(kp4由10 变为2),锁相环阻尼系数不断减少,在kp4=4 时进入负半区,锁相环失去稳定,直驱风电机组发生低频振荡。
此外,本文仍存在以下不足。
1)本文用受控电流源来代替风力机和机侧变流器,并未考虑机侧对直驱风电机组低频振荡的影响,此外,由式(15)可得,等效受控电流源对直流电压环模式产生负阻尼效应,采用等效受控电流源进行分析,使结果偏向于不稳定。下一步工作中将建立考虑机侧的直驱风电机组电流源型阻尼转矩模型并展开分析。
2)从阻尼系数和同步系数的角度出发,需重点分析多机并联系统中的机组间相互作用以及方法的适用性。
附录见本刊网络版(http://www.epae.cn)。