国内外卒中患者机器人辅助步态训练文献的可视化分析
2022-08-08王开刘倩金爱萍孟桂林李燕于晓丽朱晓萍
王开 刘倩 金爱萍 孟桂林 李燕 于晓丽 朱晓萍
(同济大学附属第十人民医院 1.护理部 2.神经内科,上海 200072)
脑卒中已成为全球第二大死亡原因,占全球死亡病例的11.8%[1],其中我国每年新增首发卒中患者约240万人次[2]。卒中患者常伴有肢体、语言及认知方面的障碍,以下肢运动功能障碍最为常见[3]。患侧肌力下降、肌张力异常会导致躯体残疾、步态异常及跌倒风险增加,严重影响运动及日常活动,给家庭和社会带来巨大心理、经济负担[4]。康复训练被证实是降低肢体残疾的最有效方法,但事实上,接受康复训练的患者仅占约总数50%[5],卒中患者康复训练存在巨大缺口。机器人辅助步态训练(robot-assisted gait training,RAGT),是20世纪80年代提出的针对卒中偏瘫患者的一种新型康复方法[6],具有专一性、重复性及可定量评价等优点[7]。RAGT能根据患者需求提供个性化的康复训练,产生充足的重复性步态运动,增加训练强度和时间,改善卒中患者步态特征,提高躯体平衡功能,并且增加下肢稳定性,减少跌倒风险。但目前,鲜有学者利用文献计量学分析卒中患者RAGT。因此,本研究借助可视化工具[8]对2001年来国内外相关文献进行分析,探讨国内外在该领域的研究差异,以期为我国学者深入研究提供参考,现报道如下。
1 资料与方法
1.1文献检索 (1)国内文献。检索中国期刊全文数据库(CNKI),以(“脑卒中”OR“卒中”OR“中风”OR“脑梗死”OR“脑出血”OR“脑血管病”)AND(“步态训练”OR“步态康复”OR“下肢训练”OR“下肢康复”)AND(“机器人”OR“人工智能”)为检索词。时间范围为2001年1月1日—2021年12月31日。(2)国外文献。检索Web of Science数据库,以(“storke”OR“cerebral infarction”OR“cerebral hemorrhage”OR“cerebrovascular disease”)AND(“gait training”OR“gait rehabilitation”OR“lower limb rehabilitation ”OR“lower limb training”)AND robot为关键词,时间范围为2001年-2021年,语种选择English,最新更新时间为2021年1月7日。
1.2文献纳入与排除标准 纳入标准:卒中患者RAGT相关文献。排除标准:(1)重复发表的文献。(2)与研究内容不相符的文献。(3)无法获得全文的文献。(4)研究类型为通知、会议、报告、专利等。(5)学位论文等。
1.3文献筛选 将检索结果导入NoteExpress文献管理软件,查重后由2名评审者单独阅读文献题目及摘要,严格按照文献纳排标准筛选适合的文献,2人评审意见出现偏差时由第三人评审。CNKI检索文献338篇,其中期刊文献212篇,学位论文100篇,会议18篇,其他类型文献8篇,不相关文献24篇,最终纳入188篇。Web of Science检索文献652篇,其中期刊文献644篇,会议8篇,手工精炼去除不相关文献341篇,最终纳入303篇。文献检索流程 见图1。
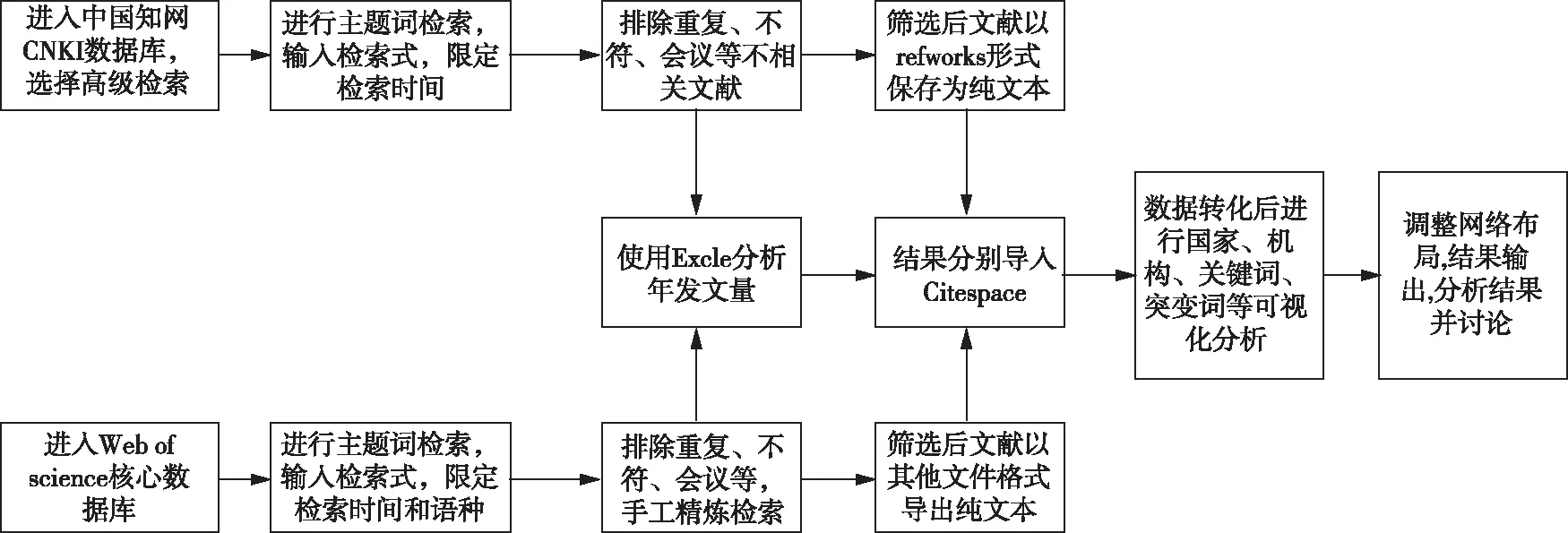
图1 文献检索流程图
1.4文献分析 本文采用Citespace作为分析工具,该软件由陈超美教授于2003年开发,需在JAVA运行环境下使用,能精准梳理文献,分析论文发布时间、地域、关键词及突变词等。将文献导入软件,时间跨度设置为2001年-2021年,选择“Years Per Slice”=1。节点类型选择Country、Institution、Keyword,分析得出有关国内外卒中患者机器人辅助步态训练研究的发文地区和机构、关键词共现图谱及突现词等。
2 结果
2.1文献发表时间分布 某段时间内的文献发表量可揭示该时间内相关领域的发展与变化。2001-2021年国内外卒中患者RAGT研究文献变化趋势 见图2。20年内国内外文献均呈上升趋势,且国外发文量整体高于国内。国外首篇卒中患者机器人辅助步态训练的文献发表于2001年,而国内最早于2010年才出现相关文献。国内发文量可大致分为3个阶段:第一阶段(2001-2012年)年发文量2篇及以下,为初始阶段;第二阶段(2013-2017年)年平均发文量10篇以上,为上升阶段;第三阶段(2018-2021年)年平均发文量20篇以上,为稳定阶段。

图2 2001年-2021年国内外卒中患者RAGT研究文献变化趋势
2.2文献发表地区或机构分布情况 通过对不同国家或机构卒中患者机器人辅助步态训练研究的共现分析,共生成296个节点,830条连线的共现图谱,国外不同国家或机构卒中患者RAGT研究发文情况共现图谱 见图3。国内各研究机构生成161个节点,0条连线的共现图谱,国内不同研究机构卒中患者RAGT研究发文情况共现图谱 见图4。其中国内以重庆医科大学附属第一医院康复医学科,河北联合大学护理与康复学院、浙江省嘉兴市第二医院康复中心及复旦大学附属华山医院康复医学科等发文量最多,但各机构间未有连线,这表明我国各机构间研究相对独立,尚鲜见科研合作。国内外前10位卒中患者机器人辅助步态训练发表地区或机构对比表,见表1。

图3 国外不同国家或机构卒中患者RAGT研究发文情况共现图谱

图4 国内不同研究机构卒中患者RAGT研究发文情况共现图谱
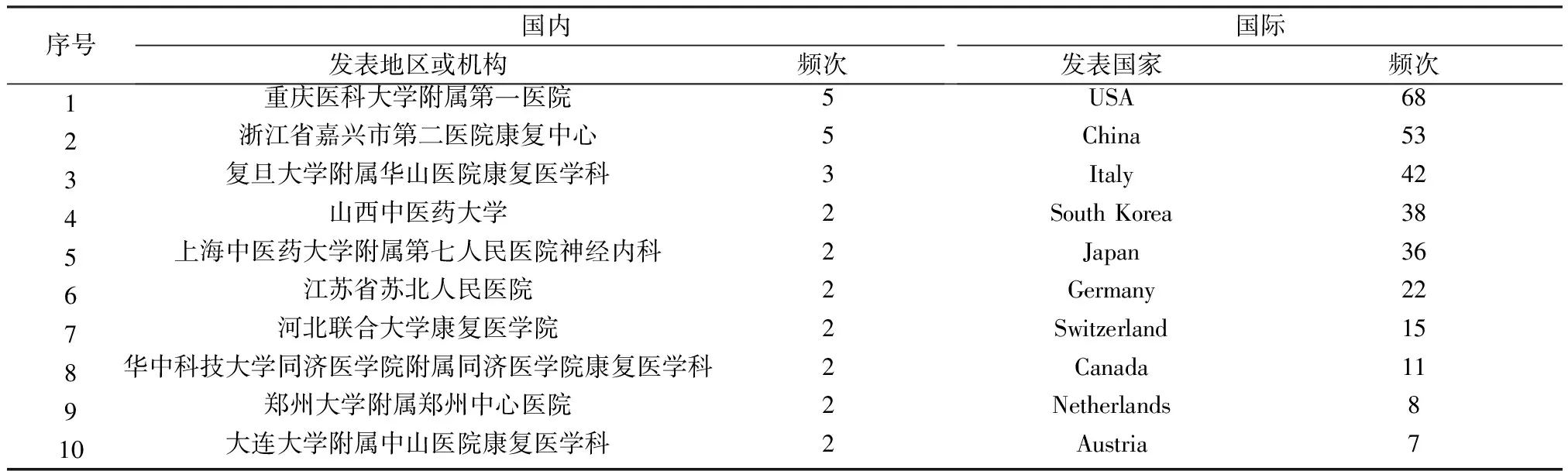
表1 国内外前10位卒中患者RAGT研究发表地区或机构对比表
2.3国内外卒中患者机器人辅助步态训练研究关键词可视化图谱 关键词是论文文献检索标识,是对文章主题的高度概括与提炼,关键词的频次反映了该领域的研究热点[9]。本文对纳入的491篇文献分别进行关键词共现分析,中文文献绘制节点136个,连线427条, 国内卒中患者RAGT研究关键词可视化图谱 见图5;英文文献绘制节点345个,连线2 099条,国外卒中患者RAGT研究关键词可视化图谱 见图6。国内外卒中患者RAGT研究关键词对比表 见表2。结合图表将国外研究内容归纳为:(1)体现研究对象的关键词为storke、individual,(2)体现研究内容的关键词为rehabilitation、walking、gaitrecovery、body weight support、robot、reliability等。国内研究内容归纳为:(1)体现研究对象的关键词:脑卒中、偏瘫。(2)体现研究内容的关键词:步行功能、运动功能、康复训练、平衡功能、机器等。

图5 国内卒中患者RAGT研究关键词可视化图谱
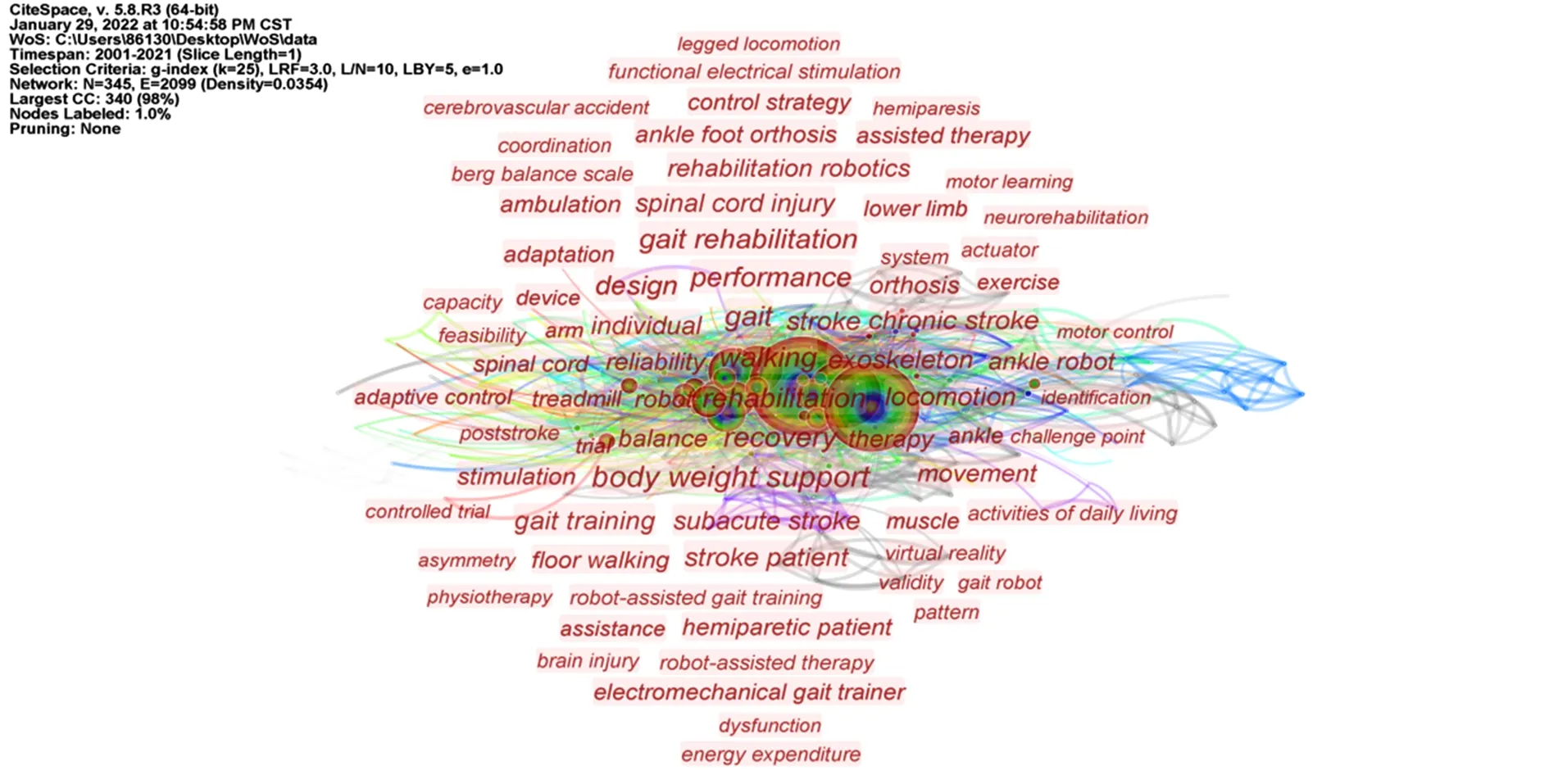
图6 国外卒中患者RAGT研究关键词可视化图谱

表2 国内外卒中患者RAGT研究关键词对比表
2.4国内外卒中患者RAGT研究突变词 突变词是指短时间内依靠词频的突变度,将使用频率增高的词从大量主题词中提炼出来,可以体现该领域研究的前沿和发展趋势[10-11]。国内卒中患者机器人辅助步态训练研究突变词变化 见图7,共16个突变词,以“头针”、“早期康复”及“步态重建”为2018年至今的研究热点;国外卒中患者RAGT研究突变词变化 见图8,共25个突变词,以“stroke rehabilitation”、“robot-assisted gait training”、“validity”、“muscle”、“feasibility”为2019年以来的研究热点,今后可作为重点研究方向。

图7 国内卒中患者RAGT研究突变词

图8 国外卒中患者RAGT研究突变词
3 讨论
3.1我国对卒中患者RAGT的关注度逐年增高 2001年Volpe BT等[12]发表第一篇关于卒中后机器人辅助运动训练的文章,文章指出已证明机器人辅助运动训练在减少卒中患者肢体损伤、改善运动能力方面取得一定成功。随后国外发文量呈上升趋势,于2020年达到高峰(54篇)。如图2所示,2001-2012年间,国内外共发文38篇,其中国内仅3篇,这提示我们2012年前国内相关研究处于起步阶段。2010年,丁敏等[13]在《中国组织工程研究与临床康复》发表了题名为“下肢步态康复机器人:研究进展及临床应用”的综述,文章详细介绍了步态康复机器人发展、作用机制及使用效果,还指出康复机器人的应用能为卒中患者带来希望,正式拉开我国卒中患者机器人辅助步态训练研究的序幕。自此,国内相关研究发文量逐年上升,试验方向不断拓宽。
3.2国内机器人辅助步态训练研究在不同地域机构间存在显著差异,科研合作程度亟待加强 本研究结果显示,我国RAGT研究相对集中分布在经济较发达、科研水平较高省份的医院或高校。究其原因,RAGT尚处于新兴领域,需要先进的技术支撑和创新的科研理念为指导,而这些医院或学校拥有完备的高水平、多学科科研团队和充足的资金来源,这保障他们有能力开展深入研究。此外,相较国外不同国家或机构间相互联系交流,国内各机构间鲜有连线,这表明国内在该领域的研究仍停滞于单中心、小样本研究,各机构间缺乏合作。因此,我国未来应加强经济发达地区的多中心研究,同时鼓励各机构间依托远程互联网信息互助系统进行深入交流,建立跨地区、跨地域、跨机构的学术交流平台,将先进经验与技术辐射至经济欠发达、科研能力贫瘠的地区,从而推动康复学科不断发展。
3.3国际卒中患者RAGT研究对我国的启示
3.3.1为卒中患者步态康复训练提供新思路 步态障碍是卒中患者的主要症状之一,患者呈卒中偏瘫步态,主要表现为步幅、步长缩短心及步速、步频减慢。同时,因患侧肌力下降,肌张力异常,常偏向健侧,患者运动时产生侧推向力,增加健侧机体负荷与跌倒风险[14]。研究表明,我国每年新发卒中患者中约70%~80%伴有肢体功能障碍[12],但康复现状不容乐观,传统康复训练作为卒中患者康复首选,不仅依赖治疗师的工作经验与技巧,还受制于康复时长、机构数量、经济实力等问题。RAGT对患者步态康复、心肺功能及日常生活活动能力等均有明显改善[15-17]。研究[17]还发现,卒中患者神经可塑性恢复的最佳时间是卒中后3个月内,因此,未来应着眼于卒中患者早期康复,建立治疗-康复-护理的一体化护理模式,将应用手法及器械的传统康复模式逐步过渡到早期机器人辅助智能化康复模式。
3.3.2依托远程互联网信息互助系统开启医工合作新模式 远程医疗技术不仅可以为不同地区的医护人员提供交流学习的平台[18],还可以借助图像、视频、扫描等形式制造患者身处场景的现场感,从而实施远距离的信息交互。依托远程互联网信息互助系统能很好弥补医疗资源匮乏地区设备落后、人才缺乏和资源利用率低等问题[19]。随着我国对学科交叉关注和研究的增多,许多学科间均尝试进行知识交叉、融合与渗透。其中,医学与工程学的交叉协同不仅开启了医工合作新模式,更是推动医学进步与发展的重要动力[20-21]。目前,RAGT正不断发展,未来更将成为一种普及化的治疗方法,不仅需考虑患者运动、感觉和平衡问题,还应注重患者的使用体验。相较上肢机器人,下肢机器人普遍存在便携性差、关节处活动僵硬、易受周围环境影响等问题[6],此外,使用时人机接触面还可能存在过敏、红斑和摩擦伤等不适感[22],降低患者应用体验。因此,未来应在保障机器人康复功能的基础上,使用便携性及柔顺性好、生物适应性优良的材料,减少患者训练的不适感与并发症,充分激发训练主动性和积极性。
3.3.3提高护士机器人辅助训练的参与度 康复小组应包含医生、物理治疗师、心理治疗师和护士等,采取康复小组干预模式能发挥各个医务人员特长,提高康复训练效果。但临床实境中,卒中患者康复训练的主要指导者为医生或物理治疗师[23],护士参与度明显不足,这可能与康复护士数量不足、缺乏相关康复知识有关。纳入的188篇中文文献中,护理期刊发文仅4篇,占比2.13%。陈煌等[24]对全国45家医院的51个卒中病房研究显示,针对卒中患者的康复护理小组仅占37.25%,绝大多数医院都缺乏专业的康复护士。而护士作为患者主要观察者、追踪者和随访者,能全面评估患者意识、认知和并发症问题,还能改善患者心理,提高康复依从性。因此,未来应建立康复护士培养机制和基于循证的卒中患者康复护理路径,提高康复护士数量和质量,让康复护士成为卒中患者RAGT的核心力量。
3.3.4构建统一的卒中患者机器人辅助步态训练康复护理方案及评估评价体系 国内外RAGT的研究方法相对集中,多以传统康复训练联合RAGT为试验组[6-7],传统康复训练为对照组,对卒中患者进行为期4-8周的康复训练[15-16]。但康复训练评估评价体系差异较大,国外研究包含客观结局指标和量表评价指标。客观结局指标以步态特征、6 min步行测试等为主;量表评价指标以Berg量表和Fugl-Meyer量表等为主[22-23],效果评价内容丰富,可信度高。国内结局指标相对简单,缺少对患者步态特征的对比与分析[15-16]。目前,鲜有相关训练方案和评价标准供临床参考,卒中康复工作也缺乏清晰的界定,因此建立统一的训练方案及评价体系具有重要的实际意义和临床意义。国内发表的文献中,满足标准随机对照试验的仅48篇,占比32.88%。这提示我们未来应开展高质量、大样本、多中心的随机对照研究,为训练方案及评估评价体系的制定提供更加科学、优质的证据。此外,还应借鉴国外卒中患者康复指南、系统评价等,构建适合我国的康复护理训练方案及评估评价体系,进一步提升我国卒中康复护理水平。
4 小结
本研究显示,国内卒中患者RAGT研究发文量偏少,且呈缓慢增长趋势,关键词集中于脑卒中、运动功能、步行功能、康复训练、步态等。突现词集中于早期康复、平衡功能及等步态重建等。现指出未来的研究思路:(1)明确康复机器人应用机制,以期为临床康复提供理论支持。(2)国内机器人康复训练鲜有指南推荐,医保目录也未被纳入,推荐使用时须排除禁忌症并征得患者及家属同意后方可应用,以保障患者权利。(3)依托远程互联网信息互助系统,开展医工合作新模式。(4)培养相关的专业康复护士,满足临床康复需求。(5)构建统一的卒中患者机器人辅助训练康复护理方案和评估评价体系。本研究文献局限于CNKI和Web of science,未对维普、万方和PubMed数据库进行检索,纳入文献不够广泛,可能存在偏倚,未来可充分利用多个数据库开展分析,让研究结果更加全面。