带混合负载的电动无人机双极性直流电力系统 拓扑结构设计及稳定性分析*
2022-08-06皇甫宜耿刘云天张宏宇
袁 聪 皇甫宜耿, 白 浩 刘云天 张宏宇
(1. 西北工业大学自动化学院 西安 710129; 2. 西北工业大学深圳研究院 深圳 518057)
1 引言
无人作战体系主要由信息侦查单元、火力打击单元、指挥控制单元等构成,而固定翼无人机承担着侦查单元和火力打击单元的任务。为实现飞行空域宽、飞行速度快、续航时间长、载重能力大和系统扩展性高的目标,电能正逐步取代传统的化石能源,成为动力系统的主要能源[1-3]。为提高系统的续航时间、电能传输效率和容错性,降低红外特性和飞行噪声,氢燃料电池、锂电池和光伏板等新能源发电技术被广泛地采用作为直流电力系统的发电设备[4-6]。
无人机的直流电力系统有以下两种典型结构:单极性结构和双极性结构,如图1所示。在双极性结构中,O代表中性线,+V和-V分别为正负极性母线P(N)到中性线O的电压。相比于单极性结构该结构具有以下特点。
(1) 具有三个电压等级,即±V和2V,方便不同电压等级的负载接入。
(2) 相比仅包含V的单极性结构,双极性结构由于其电压等级较高,电流较小,降低了推进电机的损耗,此外,随着电流的减小,电机绕组可以使用较小的线径,降低定子槽面积,进而减小电机体积。
(3) 当其中的一路出现故障时,另一路可以继续工作,提高了电力系统的容错性。
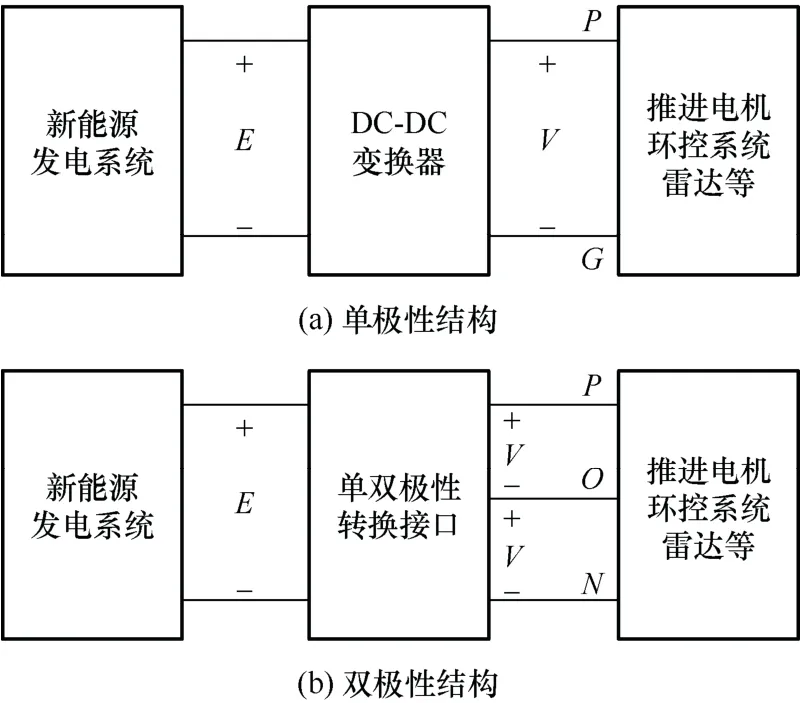
图1 无人机直流电力系统
在电动无人机的电力系统中,由于燃料电池、锂电池和光伏等新能源发电系统输出的都是单极性直流电,因此需要通过电源变换的手段将单极性直流电转换为双极性直流电,常见的单双极性转换的接口有:① 电压平衡器;② 多电平变换器。
其中,采用电压平衡器的方法需要在前级串联DC-DC变换器,这是因为应用在无人机中的燃料电池、锂电池和光伏等新能源发电设备的输出电压通常较低,而电压平衡器本身并不具备升压功能,因此需要DC-DC变换器将新能源发电设备的输出电压转换为母线所需要的电压等级。而电压平衡器的作用是将DC-DC变换器的输出电压一分为二,并从中间引出一个中性线,同时确保上下两部分的电压相同,从而实现了双极性的直流配电形式。文 献[7]采用了一种Buck/Boost双向电压平衡器,该平衡器本质上将一个双向Buck/Boost变换器跨接在单极性的直流母线之间,实现了单极性母线向双极性母线的转化。基于这个思想,文献[8]也分别得到了Cuk、Sepic和Zeta型电压平衡器。
除了DC-DC变换器级联电压平衡器外,多电平变换器也可以实现母线双极性结构。文献[9-10]采用了一种三电平Boost变换器,如图2所示,通过将两个Boost变换器的输入端串联、输出端串联(Input-series output-series,ISOS),实现了双极性输出。同样,文献[11]通过Sepic和Cuk变换器的ISOS实现了一种不需要开关管同步的双极性变换器,简化了门级驱动的设计。不同于文献[10-11]的输入端串联结构,文献[12]采用了输入端并联、输出端串联(Input-parallel output-series,IPOS)的方式实现了双极性结构,然而正是由于输入端并联,所有模块的输入端均共地,输出端无法直接串联,因此模块需要采用隔离型。文献[13]采用两个双有源桥拓扑结构并联输入、串联输出,在串联侧引出一根中心线实现了单双极性转换的目的。而文献[14]采用全桥变换器,开关管的数量虽然小于文献[13]的,但是能量只能单向流动。
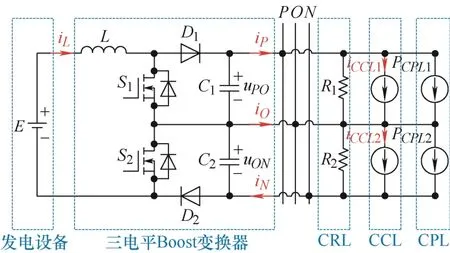
图2 基于三电平Boost变换器的双极性直流电力系统拓扑
隔离型的IPOS多电平变换器虽然实现了电气隔离,但是考虑到变压器的体积和损耗,为实现无人机长航时的要求,本文以三电平Boost变换器作为单双极性转换接口,设计控制器实现中位点电压平衡和母线电压跟随,通过李雅普诺夫间接法分析控制器参数、混合负载(包含恒功率负载、恒阻负载、恒流负载)对系统稳定性的影响。文章的创新点可总结如下。
(1) 详细地对比了基于电压平衡器的双极性直流电力系统和基于多电平变换器的双极性直流电力系统的优缺点。
(2) 全面地分析了中位点电压控制器参数和母线电压控制器参数对系统稳定性的影响,并得到了稳定边界及稳定裕度。
(3) 揭示了恒功率负载、恒阻负载、恒流负载对系统稳定性的影响。
文章剩余的安排如下:第2节详细分析了三电平Boost变换器的工作模态、数学模型,并与Buck/Boost电压均衡器对比;第3节分别设计了三电平变换器的母线电压、中位点电压控制器;第4节通过李雅普诺夫间接法分析了控制器参数、混合负载对系统稳定裕度的影响;第5节通过仿真验证了稳定性分析的结论;第6节对全文进行了总结。
2 双极性直流电力系统描述及建模
由于无人机的电气化,大量的电力电子变换器和伺服电机驱动系统被采用进行电能变换。而变换器和伺服电机驱动系统在严格控制下可以看作恒功率负载(Constant power load,CPL),为了降低分析难度,本文将负载变换器和伺服电机驱动系统看成一个CPL,并由一个可控电流源表征,其数学表达如下

式中,PCPL1和PCPL2分别是PO和ON端CPL的输出功率;uPO和uON分别是PO和ON端的母线电压;iCPL1和iCPL2分别是流过CPL1和CPL2的电流。
若无人机中有锂电池作为电源,当其恒流充电时可看作恒流负载(Constant current load,CCL),因此可等效为一个不可控电流源。此外,无人机中的照明、环控系统等设备可以看作一个恒阻负载(Constant resistance load,CRL),可以等效为一个电阻。因此,通过负载的等效,无人机双极性直流电力系统拓扑如图2所示。
图2中,E是新能源发电设备的输出电压,L是三电平变换器的电感,iL是流过电感的电流,S1、S2、D1和D2分别是三电平变换器的开关管和二极管,P、O和N分别代表正极性、中性线和负极性母线,C1和C2分别是PO和ON之间的电容,uPO和uON分别是C1和C2两端的电压,且有uPN=uPO+uON,R1和R2分别是PO和ON之间的CRL的阻值,iCCL1和iCCL2分别是流过PO和ON之间的CCL的电流,PCPL1和PCPL2分别是PO和ON之间的CPL的输出功率。
2.1 三电平Boost变换器工作模态分析
为减小电感电流iL的脉动量,设置两个开关管的PWM波相位差180°。同时假设电感L足够大,使得变换器工作在电流连续模式,且输出电容C1=C2。此时,三电平Boost变换器存在四种等效电路,如图3所示。
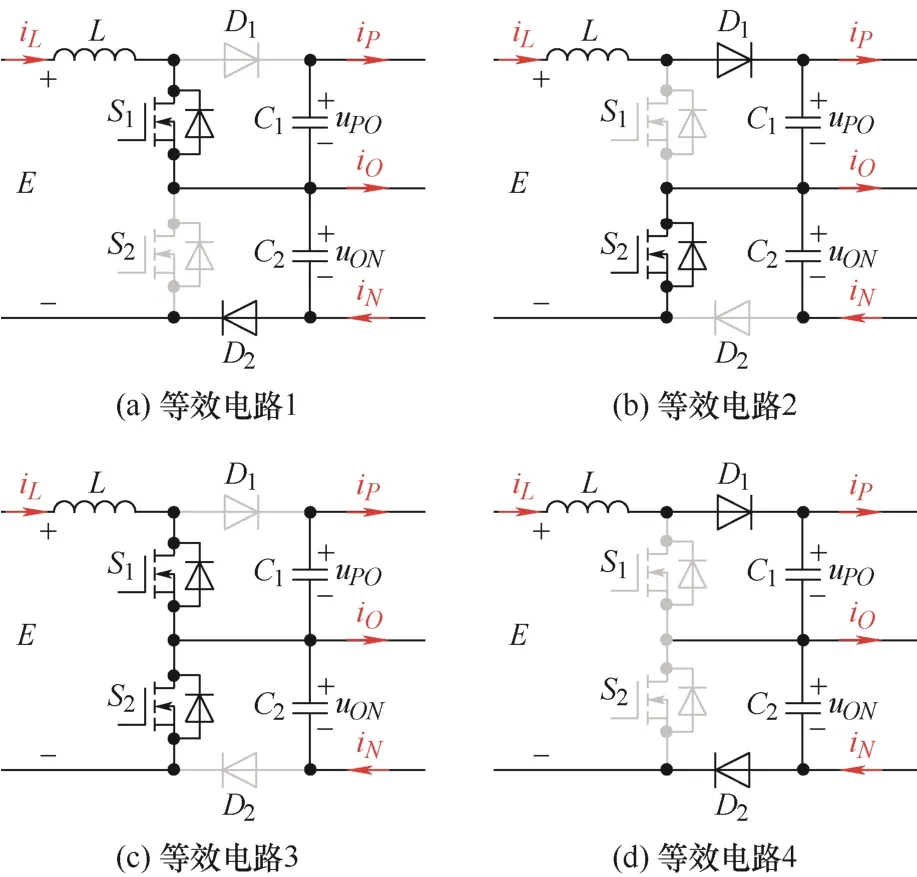
图3 三电平Boost变换器四种等效电路示意图
根据输入电压E与母线电压uPO(uON)的大小关系,三电平Boost变换器的工作状态可以分为两种模式。模式1:当E>uPO(uON)时,占空比d<0.5;模式2:当E<uPO(uON)时,占空比d>0.5。由于开关管S1和S2的占空比相同,因此当PO端负载和ON负载功率相同时,理论上两电容电压平衡,即uPO=uON=0.5uPN。
(1) 当d<0.5时。工作波形如图4a所示,TS是一个开关周期。由于占空比小于0.5,因此t0时刻前S1和S2均处于关断状态。在t0时刻,S1导通,输入电压E通过L、S1和D2向C2充电,等效电路对应图3a,该状态将一直持续至t0+dTS。此时,电感两端的电压为E-uON>0,电感电流升高,增加量为

在t0+dTS时刻,S1关断,此时两个开关管均不导通,输入电压E通过L、D1和D2向C1和C2充电,等效电路对应图3d,该状态将一直持续至t0+0.5TS。此时,电感两端的电压为E-uPN<0,电感电流降低,减少量为

在t0+0.5TS时刻,S2导通,输入电压E通过L、D1和S2向C1充电,等效电路对应图3b,该状态将一直持续至t0+(0.5+d)TS。电感电流波形与等效电路1的一致。

图4 电流波形图
在t0+(0.5+d)TS时刻,S2关断,此时两个开关管均不导通,输入电压E通过L、D1和D2向C1和C2充电,等效电路对应图3d,该状态将一直持续至t0+TS。电感电流波形与等效电路4的一致。
(2) 当d>0.5时。工作波形如图4b所示,TS是一个开关周期。由于占空比大于0.5,因此t0时刻前S1处于关断状态,S2处于导通状态。在t0时刻,S1导通,输入电压E通过L、S1和S2构成回路,等效电路对应图3c,该状态将一直持续至t0+(d-0.5)TS。此时,电感两端的电压为E>0,电感电流升高,增加量为

在t0+(d-0.5)TS时刻,S2关断,输入电压E通过L、S1和D2向C2充电,等效电路对应图3a,该状态将一直持续至t0+0.5TS。此时,电感两端的电压为E-uON<0,电感电流降低,减少量为

在t0+0.5TS时刻,S2导通,此时两个开关管均处于导通状态,输入电压E通过L、S1和S2构成回路,等效电路对应图3c,该状态将一直持续至t0+dTS。电感电流波形与等效电路3的一致。
在t0+dTS时刻,S1关断,输入电压E通过L、D1和S2向C1充电,等效电路对应图3b,该状态将一直持续至t0+TS。电感电流波形与等效电路2的 一致。
基于安秒平衡原理,三电平Boost变换器的输入输出电压关系如下

通过式(6)可以看出,三电平Boost变换器的输入输出电压关系与传统Boost变换器一致。
2.2 与基于Buck/Boost平衡器的双极性直流电力系统对比
为进一步阐述三电平Boost变换器的双极性直流电力系统的优势,从电感电流脉动、电容电压脉动和开关管应力等方面,与基于Buck/Boost电压平衡器的双极性直流电力系统(图5)对比。由于三电平Boost变换器的输入输出电压关系与Boost变换器一致,因此在相同电压等级下,二者的占空比相等,在本文中均以d表示。
首先,基于第2.1节的分析,以图5中Boost变换器电感L1的电流脉动最大值作为基准值,给出基于三电平Boost变换器的系统电感电流脉动量标幺值
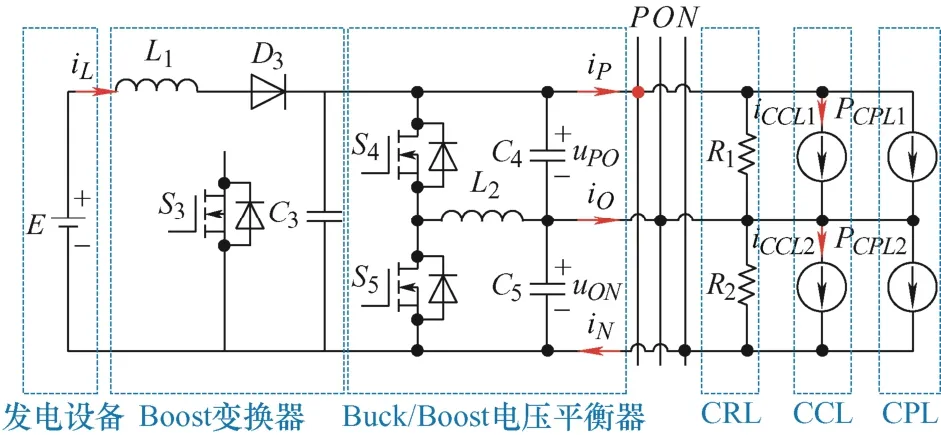
图5 基于Buck/Boost电压平衡器的双极性直流电力系统

针对Boost变换器的研究已经在很多文献中体现,本文直接给出电感L1电流脉动的标幺值,如式(8)所示

此外,以Boost变换器的电容C3的电压脉动最大值作为基准值,基于三电平Boost变换器的系统电容电压脉动量如下

基于Boost变换器的系统电容电压脉动量如下

式中,dVB是电压平衡器的占空比(直流分量等于0.5)。
通过图2、图5和式(7)~(12),两种双极性直流电力系统对比可总结如表1所示,其中i-NTL,i=L,C,S分别代表基于三电平Boost变换器的双极性直流电力系统的电感、电容和管数量,i-NB,i=L,C,S分别代表基于Buck/Boost平衡器的双极性直流电力系统的电感、电容和管数量。
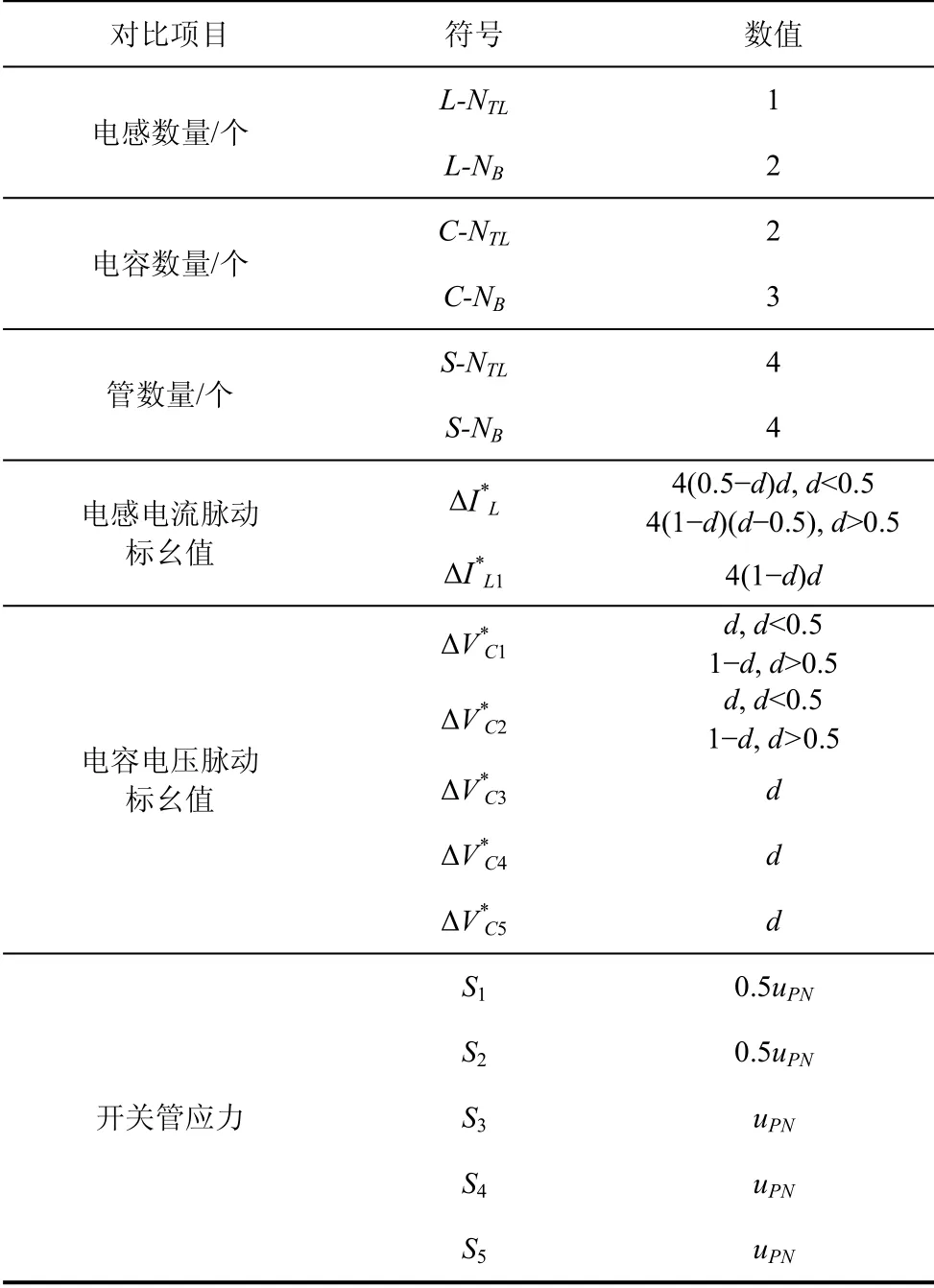
表1 两种双极性直流电力系统对比
从表1可以看出,相比基于Buck/Boost电压平衡器的双极性直流电力系统,基于三电平Boost变换器的双极性直流电力系统磁性元件和开关管数量均少,而且在占空比相同的情况下,电感电流脉动、电容电压脉动均也均小。这就表明当两种双极性直流电力系统的电流、电压脉动最大值相同时,基于三电平Boost变换器的双极性直流电力系统所需要的电感、电容量更小,电感、电容的体积也会更小。
2.3 双极性直流电力系统状态空间平均模型
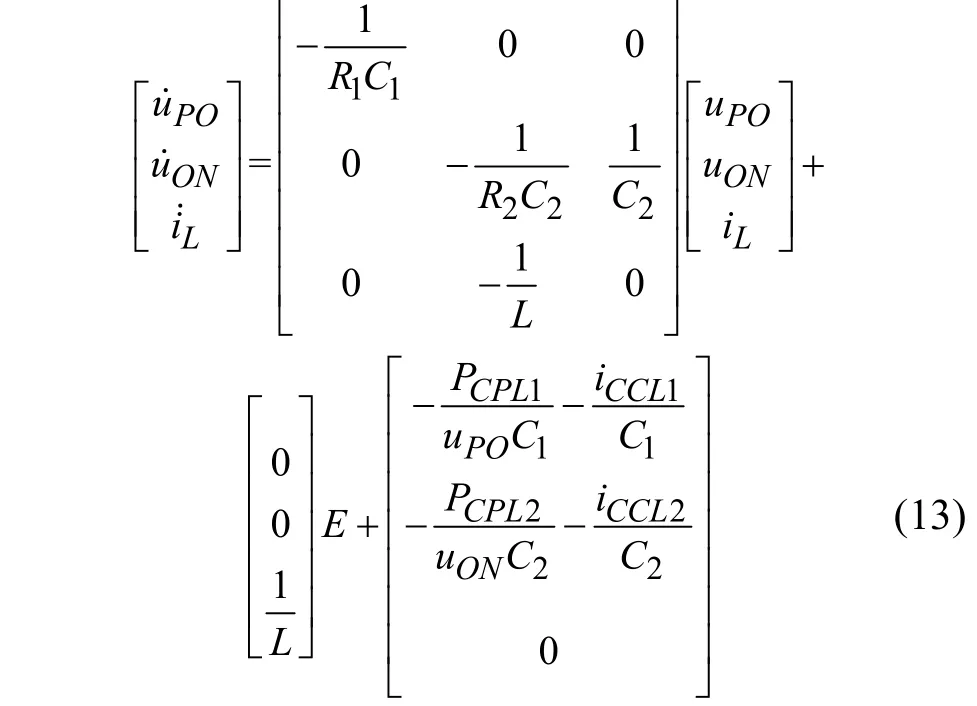
针对图2所示的双极性直流电力系统结构,依据三电平Boost变换器的四种等效电路,选取电容电压uPO和uON,电感电流iL作为状态变量,得到四个等效电路下的状态空间表达式如下所示。
(1) 等效电路1
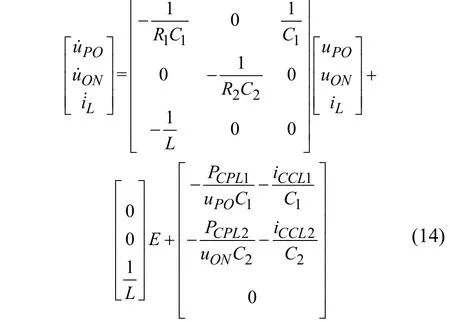
(2) 等效电路2
(3) 等效电路3

(4) 等效电路4

根据第2.1节的分析可知,当d>0.5时,电力系统一个周期内会出现图3中1、2和3三种等效电路。基于等效电路,令式(13)×(1-d)+式(14)×(1-d)+式(15)× (2d-1),同时为简化分析和电压均衡,令C1=C2=C,可得d>0.5的状态空间平均模型

当d<0.5时,电力系统一个周期内会出现图3中1、2和4三种等效电路。基于等效电路,令式(13)×d+式(14)×d+式(16)×(1-2d),可得d<0.5的状态空间平均模型
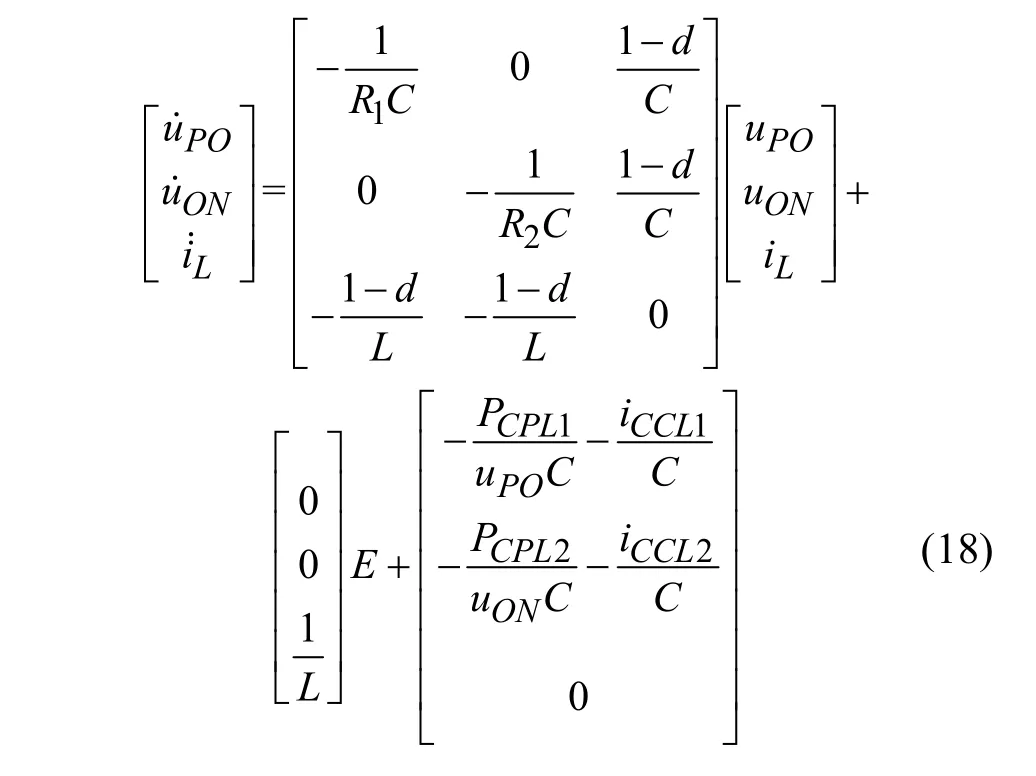
可以看出,虽然d<0.5和d>0.5的等效电路不同,但是状态状态空间平均模型却一致。
3 双极性直流电力系统控制策略设计
基于图2所示系统,双极性直流电力系统的控制策略设计主要目的是三电平Boost变换器电压电流跟随、中位点电压平衡,控制策略的结构框图如图6所示。

图6 无人机双极性直流电力系统控制结构框图
3.1 母线电压控制
三电平Boost变换器的母线电压控制采用双环PI控制实现。电压外环通过传感器检测母线电压uPN,并与参考电压uPNref进行比较,输出电压误差,通过PI控制器调节,输出电感的参考电流iLref,这一过程的数学表达如下

式中,sV是电压外环的积分部分;kiV和kpV分别是电压外环的积分系数和比例系数。
电流内环通过传感器检测电感电流iL,并与参考电流iLref进行比较,输出电流误差,通过PI控制器调节,输出占空比dC,这一过程的数学表达如下

式中,SI是电流内环的积分部分;kiI和kpI分别是电流内环的积分系数和比例系数。
3.2 中位点电压控制
在实际应用中,由于存在以下三个问题,中位点电压存在波动,即uPO和uON不相等。而长时间的中位点电压波动会降低器件的使用寿命,影响PO端和ON端的供电需求。
(1) 输出电容C1、C2的参数不能完全相同。
(2) PO端和ON端的负载功率不相同。
(3) 开关管的驱动电路以及开关管的特性造成S1和S2的占空比不相同。
本文采用PI控制调节中位点电压。通过传感器检测电压uPO和uON,并得到二者之差,通过PI调节负反馈补偿于S1和S2的占空比,以实现uPO和uON的零误差收敛,这一过程的数学表达如下

式中,sO是中位点电压控制的积分部分;kiO和kpO分别是中位点电压控制的积分系数和比例系数。
最终,驱动开关管的调制信号为电压电流控制信号dC和中位点电压控制信号dO的叠加,即

4 基于特征值法的稳定性分析
CPL的伏安特性如式(1)所示,将其在工作点(uPOref,uONref,iLref)处泰勒级数展开,得
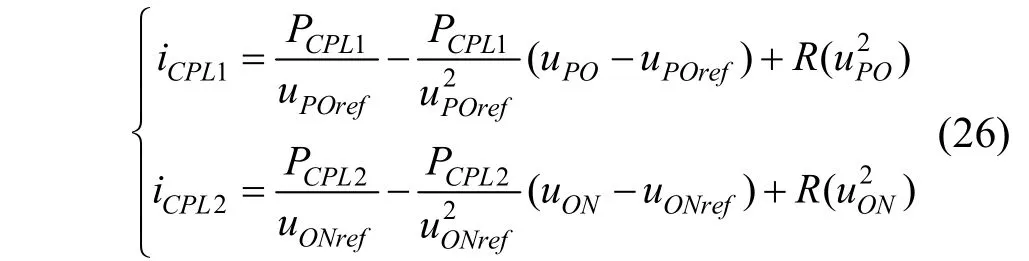
忽略高阶无穷小,式(26)化简为
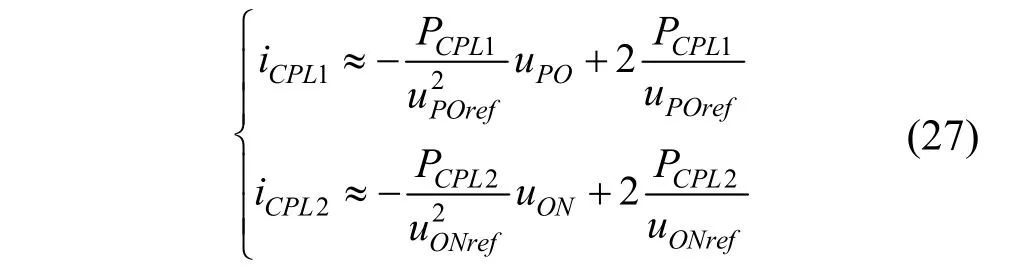
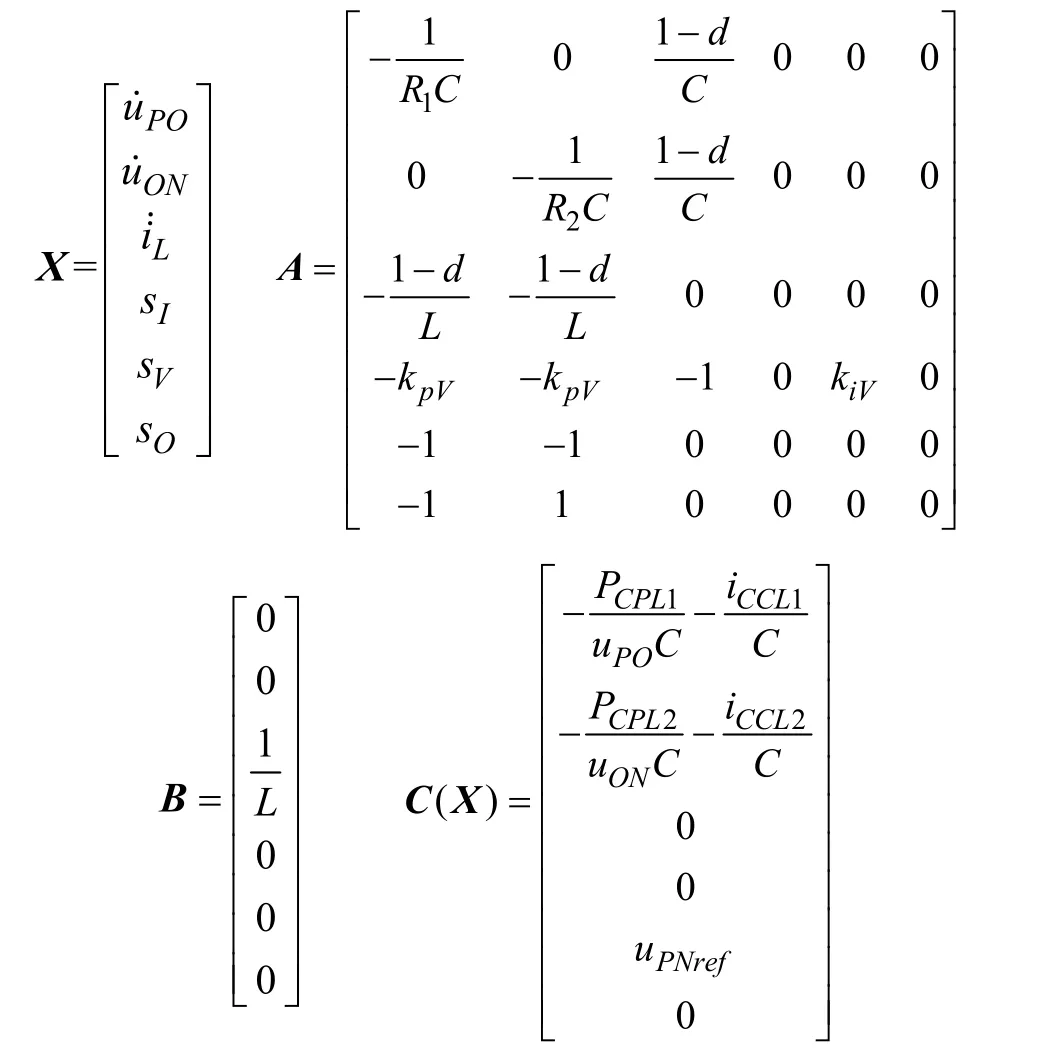
式(27)表明,CPL可以近似等效为一个负电阻和一个恒流源的并联,而负电阻的负阻抗特性会降低系统的阻尼,使系统由过阻尼状态进入到欠阻尼状态,严重时甚至会导致系统失稳崩溃,影响无人机的飞行安全,因此,对系统进行稳定性分析十分必要。特征值法(Lyapunov间接法)是利用系统状态方程的解的特性来判断系统稳定性的方法,系统稳定的充分必要条件是系统雅可比矩阵的全部特征值都位于复平面的左半平面,即全部特征值的实部小于零[15]。为了得到系统的雅可比矩阵,首先需要构造系统的闭环状态方程,以uPO、uON、iL、sI、sV和sO为状态变量,状态方程如下

式中
然后,令

基于式(26)可得到恒功率负载的小信号模型
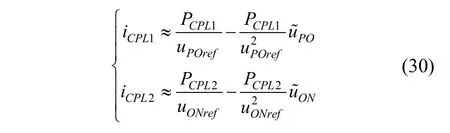
将式(19)、(21)、(23)、(29)和(30)代入式(28),化简可得系统的小信号模型

式中,AJ是雅可比矩阵,具体参数可见式(32)。
最后,基于表2所示的无人机双极性直流电力系统参数,通过特征值法得到中位点电压控制器参数、母线电压控制器参数、恒功率负载、恒流负载、恒阻负载与系统稳定性的关系图。
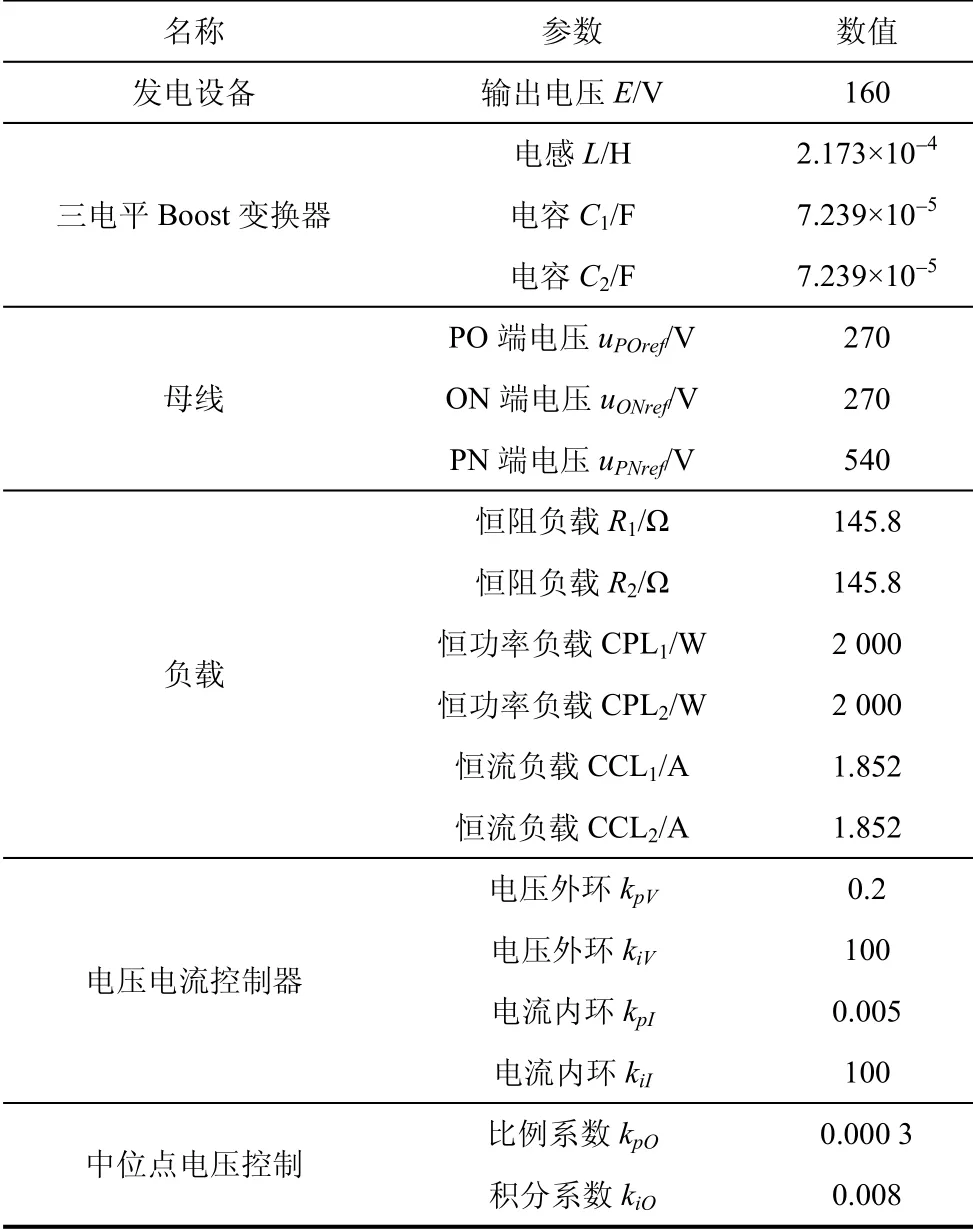
表2 无人机双极性直流电力系统参数
在保证其余参数不变且PCPL1=PCPL2、RCRL1=RCRL2、iCCL1=iCCL2的情况下,图7和图8分别展示了中位点电压控制器比例系数kpO和积分系数kiO对系统稳定性的影响。可以得到以下结论。
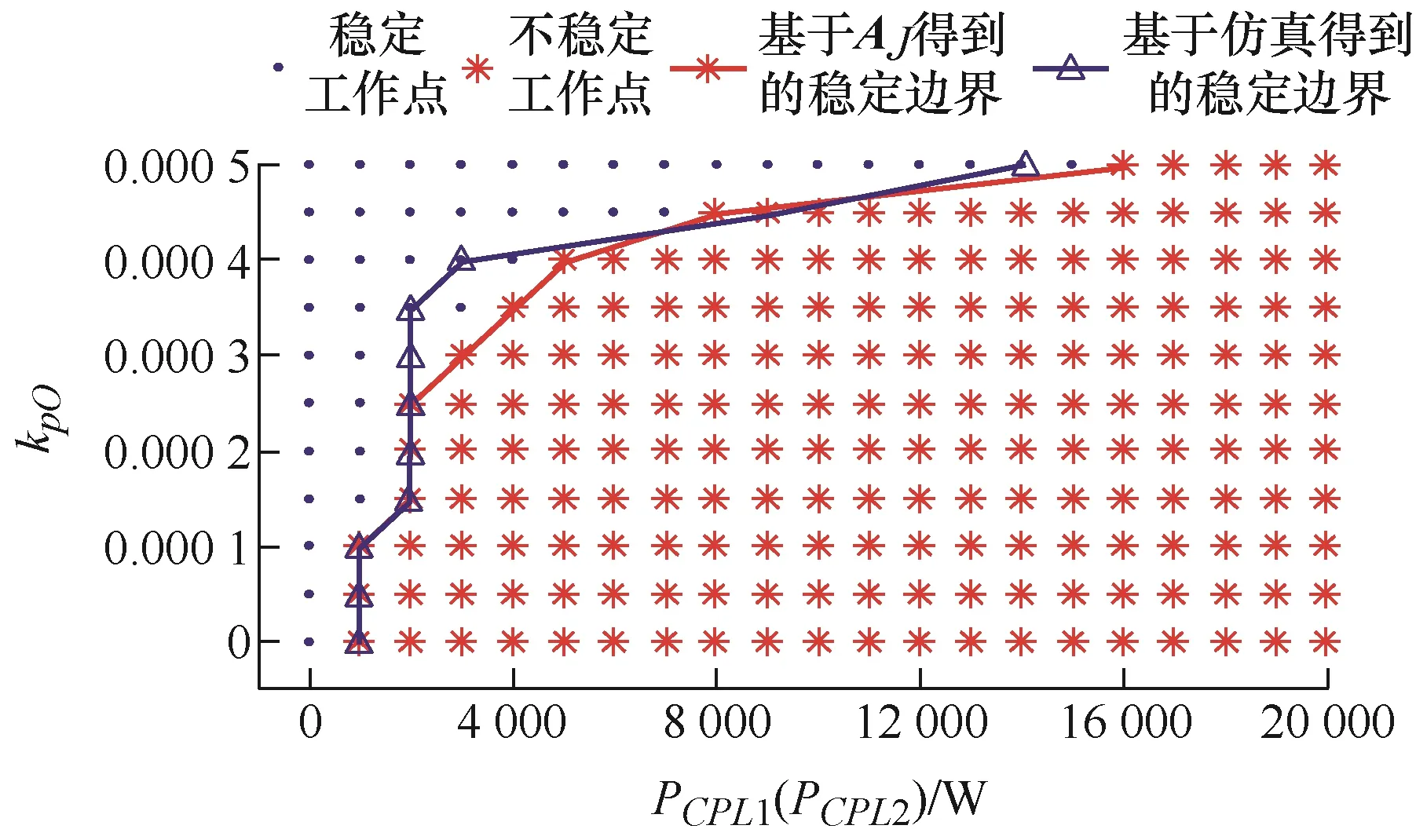
图7 kpO由0增加到0.000 5时所对应的稳定和不稳定 工作点
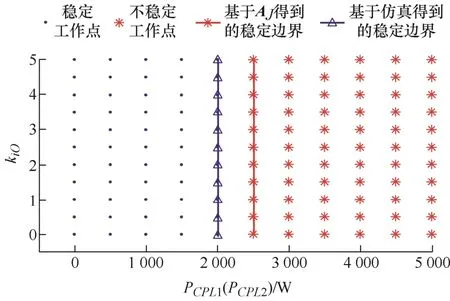
图8 kiO由0增加到5时所对应的稳定和不稳定工作点
(1) 随着中位点电压控制器的比例系数kpO的增大,系统的稳定裕度也随之增大。
(2) 中位点电压控制器的积分系数kiO对系统稳定性影响不大。
同样,可以得到母线电压控制器参数对系统稳定性的影响,如图9~12所示,并得到以下 结论。
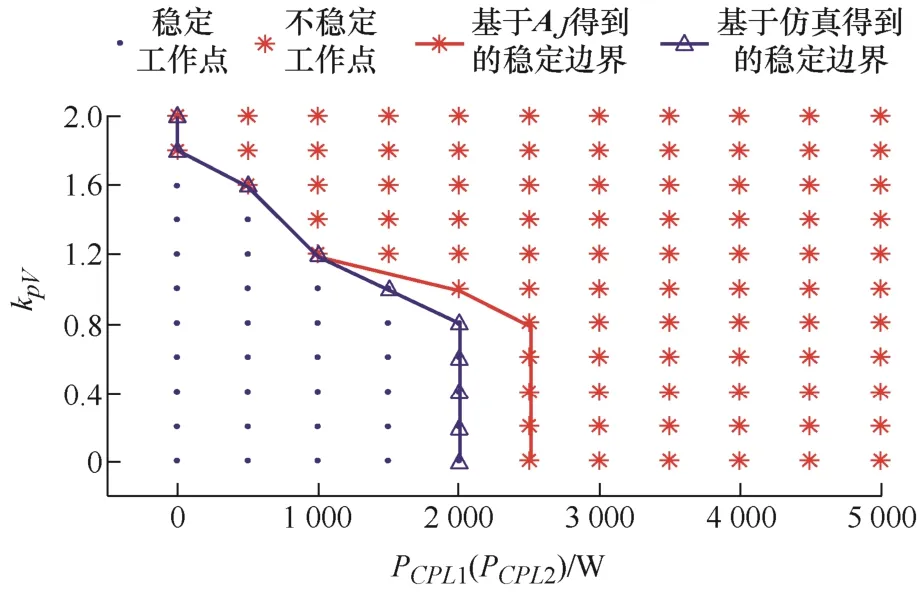
图9 kpV由0增加到2时所对应的稳定和不稳定工作点

图10 kiV由0增加到500时所对应的稳定和 不稳定工作点
(1) 系统的稳定裕度随电压外环的比例系数kpV的增大而减小。
(2) 电流内环的比例系数kpI、积分系数kiI的对系统稳定性影响不大。
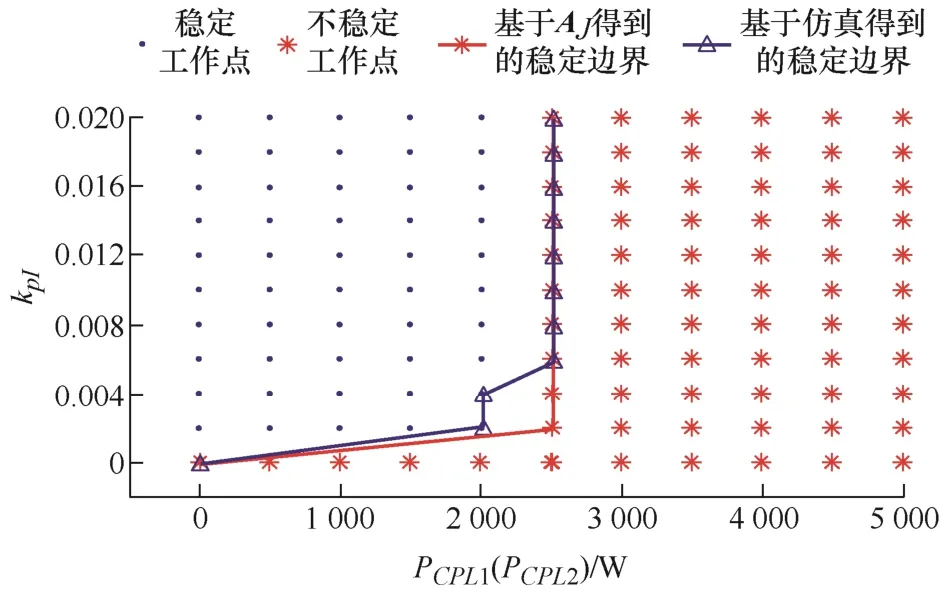
图11 kpI由0增加到0.02时所对应的稳定和不稳定工作点
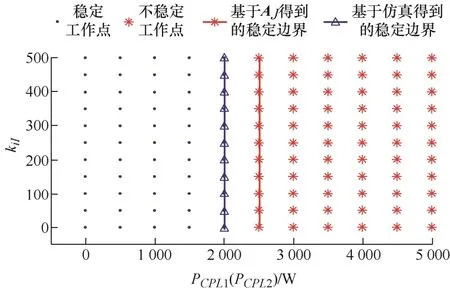
图12 kiI由0增加到500时所对应的稳定和不稳定工作点
为了进一步验证负载对系统稳定性的影响,图13、14展示了CRL和CCL对系统稳定裕度的影响,可得到以下结论。
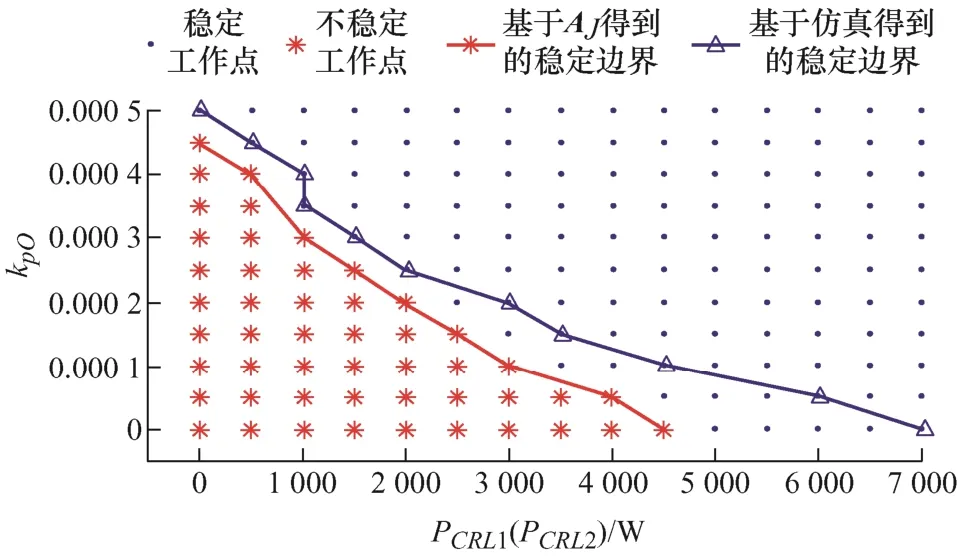
图13 CRL1(CRL2)对系统稳定工作点的影响

图14 CCL1(CCL2)对系统稳定工作点的影响
(1) CRL会提高系统的稳定性,且随着阻值的增大稳定裕度也越大。
(2) CCL会提高系统的稳定性,且随着电流值的增大稳定裕度也越大。
5 仿真及试验验证
为了验证控制策略及稳定性分析的有效性,基于表2所示的参数,通过Matlab/Simulink仿真软件得到了电压、电流负载阶跃变化的响应曲线。
首先,调整中位点电压控制器比例系数kpO,观察kpO=0.000 1、0.000 3和0.000 5时系统的仿真波形,分别如图15、16和17所示,其余值的稳定边界如图7的三角标记线所示。从图15、16和17可以看出,当系统达到不稳定工作点时,系统的电压开始振荡,难以收敛至参考点,系统失稳。当系统到达稳定工作点时,电压的振荡幅值逐渐减小,最终收敛至平衡点,系统回稳。
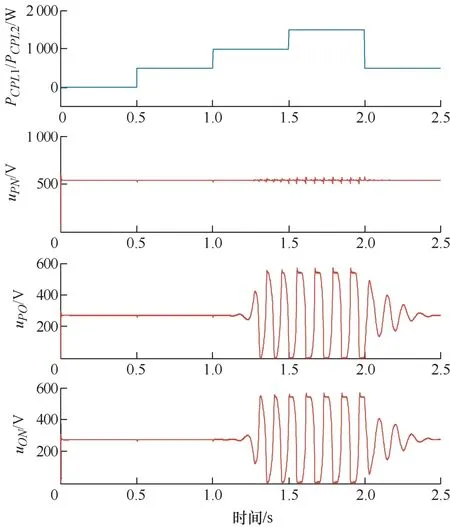
图15 当kPO=0.000 1时CPL阶跃扰动下的仿真波形
其次,调整中位点电压控制器积分系数kiO,由于kiO对系统稳定性的影响较小,本文选取一个较大的值,即kiO=5,与额定值0.008对比,电压的仿真波形如图16和图18所示,其余值的稳定边界如图8的三角标记线所示。

图16 当kpO=0.000 3时CPL阶跃扰动下的仿真波形
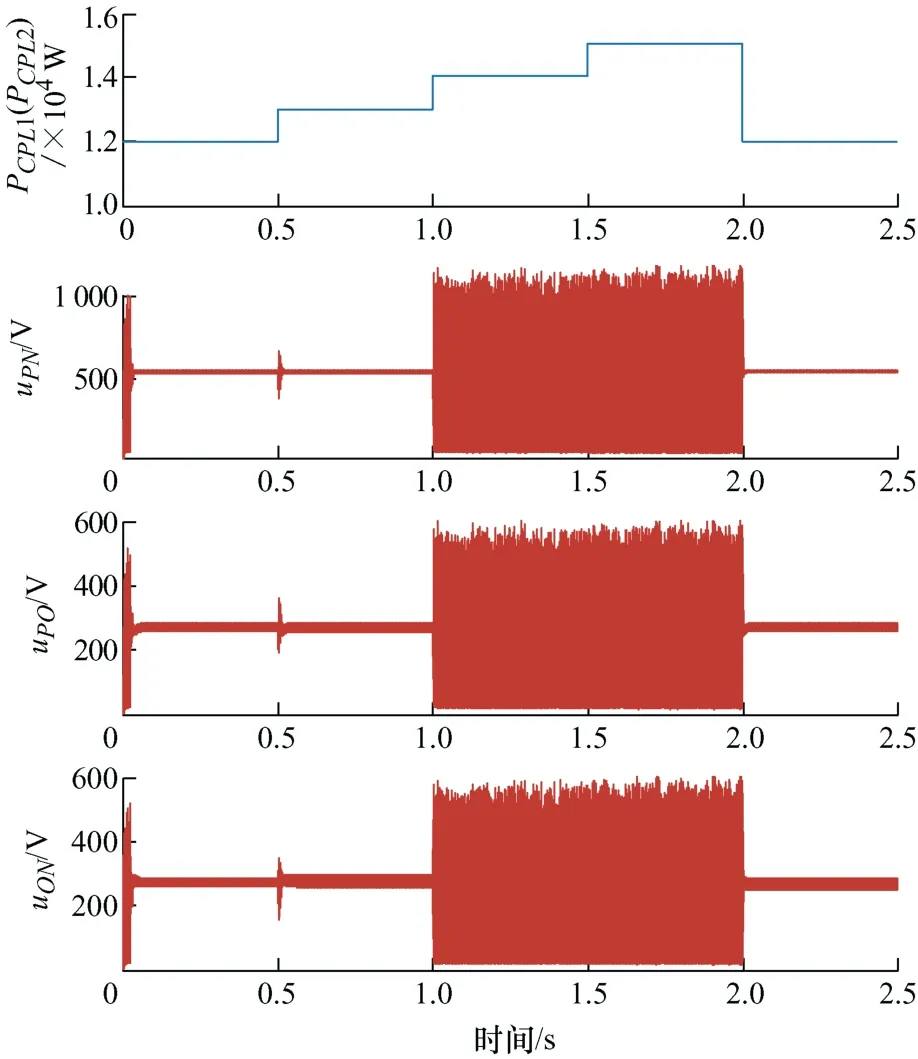
图17 当kpO=0.000 5时CPL阶跃扰动下的仿真波形
然后,调整母线电压控制器的电压外环比例系数kpV,观察kpV=0.2和1.6时系统的仿真波形,如图16和图19所示,其余值的稳定边界如图9的三角标记线。由于电压电流控制器参数kiV、kpI和kiI对系统稳定性影响不大,稳定性分析结论与中位点电压控制器积分系数kiO的一致,本文不再赘述。
最后,观察恒阻负载和恒流负载对系统的影响,图20展示了当PCPL1(PCPL2)=5 000 W时,恒阻负载CRL1和CRL2的功率由1 000 W逐步增加到2 500 W的电压仿真波形。可以看出,阻性负载可以增大系统的稳定裕度。当CRL1和CRL2的功率等于2 000 W时,系统稳定,当CRL1和CRL2的功率小于2 000 W时,系统又失稳。图21展示了当PCPL1(PCPL2)=2 000 W时,恒流负载的功率由500 W逐步增加到2 000 W时电压电流仿真曲线。可以看出恒流负载可以增大系统的稳定裕度。当CCL1和CCL2的功率等于2 000 W时,系统稳定,当CCL1和CCL2的功率小于2 000 W时,系统又失稳。其余值的稳定边界如图13和图14的三角标记线所示。

图18 当kiO=5时CPL阶跃扰动下的仿真波形
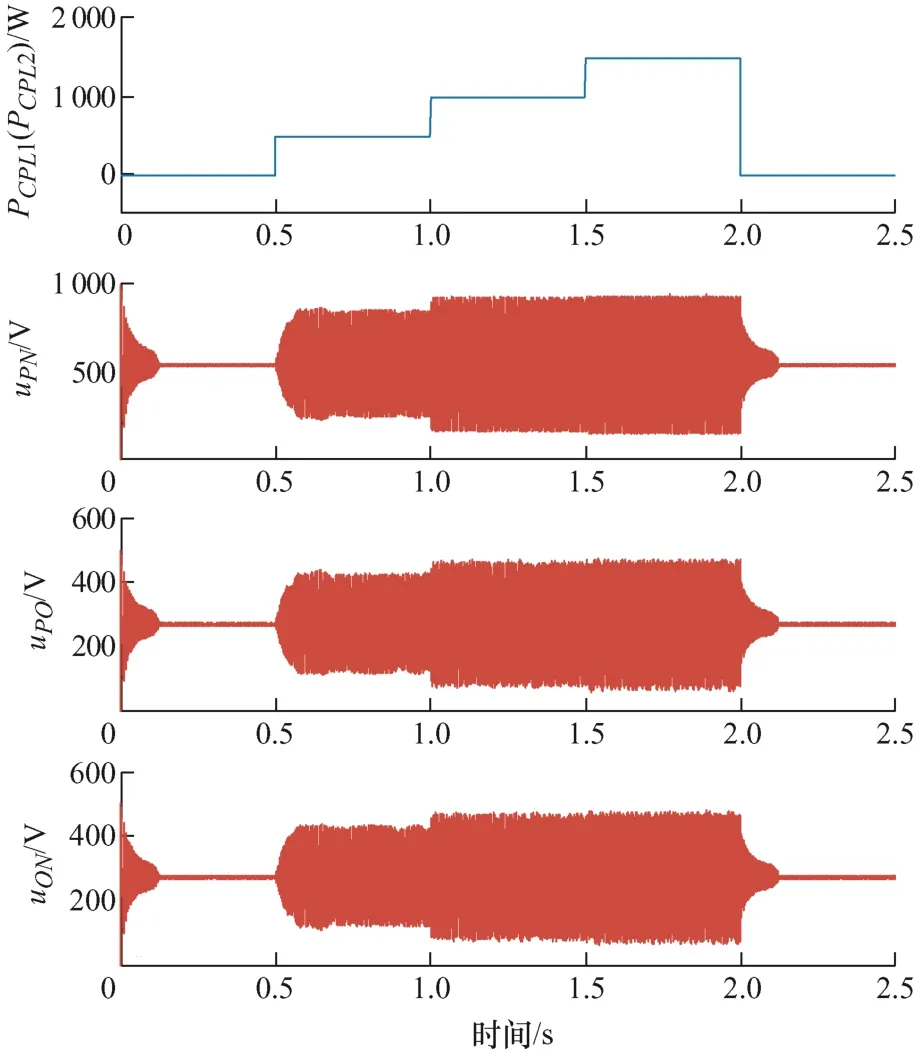
图19 当kpV=1.6时CPL阶跃扰动下的仿真波形

图20 当PCPL1(PCPL2)=5 000 W时CRL阶跃扰动下仿真波形
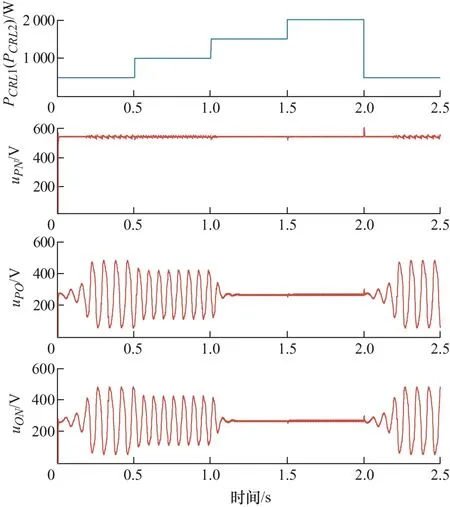
图21 当PCPL1(PCPL2)=2 000 W时CCL阶跃扰动下仿真波形
通过以上分析可以发现,由于模型和数值求解方法的差异,通过Matlab/Simulink仿真软件得到的稳定边界与李雅普诺夫间接法得到的稳定边界存在误差,但是稳定边界的变化趋势一致。
6 结论
本文对比了两种实现双极性直流电力系统的单双极性转换接口,即Buck/Boost电压平衡器和三电平Boost变换器。结果表明基于三电平Boost变换器的双极性直流电力系统不仅电感、电容和管数量要更少,而且电感电流脉动量、电容电压脉动量和管应力也更小。因此,本文采用三电平Boost变换器作为单双极性接口,设计了无人机双极性直流电力系统,并且构造了系统的状态方程和控制器,得到了闭环系统的雅可比矩阵。然后,为了分析无人机电力系统的恒功率负载、恒阻负载和恒流负载对系统稳定性的影响,本文基于系统闭环状态方程的雅可比矩阵,通过李雅普诺夫间接法得到系统参数及负载对系统稳定性的影响。稳定性分析的结果可总结如下。
(1) 相比母线电压控制器的电流内环控制,中位点电压控制器和电压外环控制对系统稳定性影响较大。
(2) 稳定性随中位点电压控制器的比例系数的增大而增大,随电压外环控制器的比例系数增大而减小。
(3) 系统稳定性随恒功率负载的功率增大而减小,随恒阻负载、恒流负载的功率增大而增大。
