基于视觉的图像处理与定位技术研究
2022-08-05邹宇
邹 宇
(江苏开放大学,江苏 南京 210012)
0 引言
双目视觉技术指的是使用相机代替人眼获取不同的图像运动信息,再将人类大脑的思维通过视觉处理器模拟出来,从同一场景的不同角度对物体进行二维图像拍摄,最终恢复物体的三维坐标。双目视觉技术的计算精度高、实现简单,属于人工智能视觉领域的重点研究问题。双目视觉技术的特点明显,尤其在人类无法作业的场景,包括高危环境、有害环境等,双目视觉技术已经应用于各行各业,是其他目标定位技术无法超越的一种图像获取技术。因此,双目视觉技术一直是人工智能领域的重点技术。该文提出的基于双目视觉技术的定位控制系统包括系统构建、相机标定、图像预处理、图像匹配和信息获取等。
1 图像处理技术
图像平滑技术也称图像模糊处理技术,属于一种速度快、准确率高且操作简单的图像处理技术,图像平滑技术能够有效降低图像中的噪声,避免图像失真。
1.1 脉冲噪声
一般情况下,数字信号在传输过程中产生的数据错误容易造成图像脉冲噪声的出现。如要判断是否出现了脉冲噪声,需要确定一点的像素值,再与其他像素点的灰度值进行比对,这样可以获得脉冲噪声与其他像素点灰度特征值的差异。通常情况下,脉冲噪声是相邻域中像素点灰度特征的极值。然而,像脉冲噪声极值点也经常会存在于其他区域或边界,判断脉冲噪声点不能仅依靠极值点实现,同时要综合考虑其他因素。
1.2 高斯噪声
高斯噪声模型广泛应用于图像平滑技术领域的原因是高斯噪声的数据整理率在图像的空间域或频域较高。高斯噪声包括2个特征:一个是高斯噪声的噪声波动和噪声密度较大;另一个是高斯噪声图像中每个像素的灰度级都会被影响,其干扰图像像素的范围较广,即使是相同灰度级的像素受高斯噪声干扰的程度也不同。
2 双目立体视觉定位系统设计
双目立体视觉定位系统主要是通过获取图像的深度信息以得到图像的三维立体信息。在完成图像预处理工作和图像立体匹配工作后,实现相机立体标定,再采用三角测量的模式,用2个相机对相同目标物体拍摄图像,进而从视差中恢复距离。为了最终能够获得空间物体目标在现实领域中的实际物理形态,双目立体视觉定位系统要综合考虑包括根据立体匹配结果获得视差以及根据视差对物体目标的特征进行三维坐标还原等在内的多个问题。
2.1 双目视觉立体定位系统构成
该文创建的双目视觉立体定位系统结构如图1所示。1) 相机。该文选取的相机像素是130万,属于工业级黑白相机,USB接口免驱安装,工作电压为5V。2个相机可以通过USB接口与计算机连接,实现数据信息传输。由于相机不用安装驱动,也不需要数据采集卡,通过MFC编程就可以实现对图像的采集和保存,同时可以控制图像尺寸大小和实际曝光时间。通过手动方式调整镜头的焦距距离,对图像进行捕捉时,要确保相机内部参数固定。不采用自动对焦镜头进行图像捕捉的原因是进行标定后的相机内部参数不能改变。2) 计算机。双目视觉立体定位系统对计算机显卡和处理器要求较高,如果计算机内存过小,处理器计算速度较低,系统图像处理模块中的大量算法计算会导致计算机出现卡顿等情况。系统为了能够有效显示目标物体定位结果,完全呈现目标物体图像和拍摄图像,需要性能较好的计算机,因此,该文选自i3处理器的台式机。3) 平台。该文进行的图像捕捉试验需要一个木制平板,为了能够有效实现对目标物体的准确定位,可以固定2台CCD相机的安装平台。
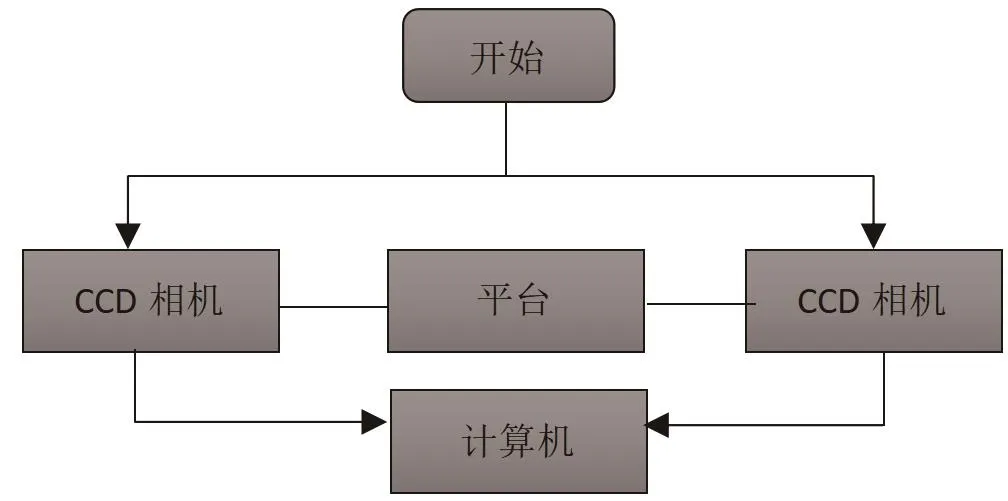
图1 双目视觉立体定位系统硬件组成图
双目视觉立体定位系统采用了MFC编程方式,能够在Windows操作系统中运行,同时调用了Open CV函数库完成了系统控制程序的编译,系统流程图如图2所示。
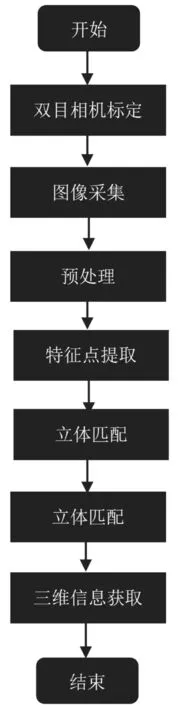
图2 双目视觉立体定位系统流程图
如图3所示,手绘黑白棋盘格图像置于质地坚硬的平板上,10×10边长设为2cm的黑白格,目标是排除误差较大的角点并排除误差较多的点。同时将相机标定的图像和目标物体的图像数据传输到计算机系统中并保存。

图3 图像采集模块示意图
如图4所示,将左右相机固定,对棋盘进行移动操作,共采集图像20组,全部由相机进行图像捕捉。分别点击4个角点,即左上、左下、右上和右下。根据角点信息计算获得图像主光心坐标,再依次提取角点,重复以上步骤。
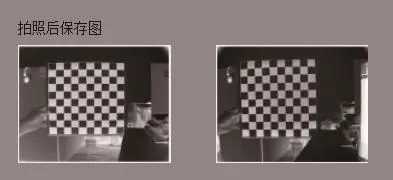
图4 图像预处理模块示意图
如图5所示,原点是图像左上角的第一个角点,方向指向棋盘模板外,轴垂直于图像平面,根据创建的坐标系得到每个角点单应性矩阵。同时,通过单应性矩阵可得相机的内、外参数。为了得到更高精度的相机内、外参数,必须增加畸变因数,把标定得到的内、外参数进行非线性化的求解。

图5 图像校正和匹配模块示意图
该文对选择采集的2组图像进行数据校正,得到有效区域。并通过改进基于固定窗口的特征匹配算法获得自适应区域特征匹配算法,达到了提高数据匹配准确度和精确度的目的。
如图6所示,将提前标定好的相机内、外参数和立体匹配得到的视图差等通过MATLAB标定箱导入双目视觉立体定位系统中,以获得目标物体定位模块,并计算得出物体三维坐标及位置距离。
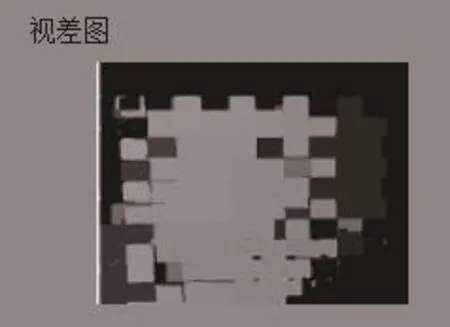
图6 目标定位模块示意图
2.2 试验平台搭建
该文选用的双目视觉立体定位系统相机镜头焦距为4mm,属于工业相机,将2个相机固定在同一水平位置,确保2个相机的内、外参数完全一致。相机内部参数见表1,相机固定位置如图7所示。
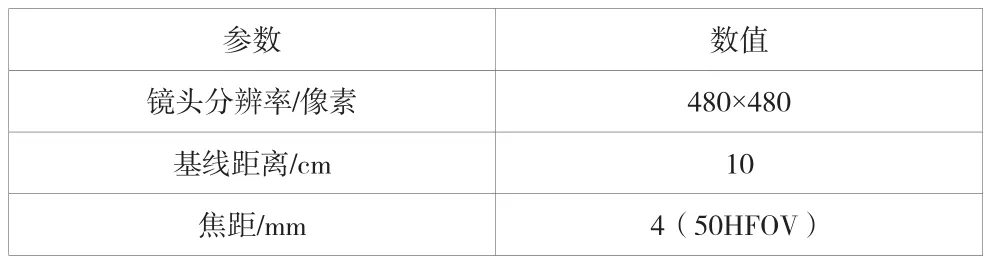
表1 相机内部参数
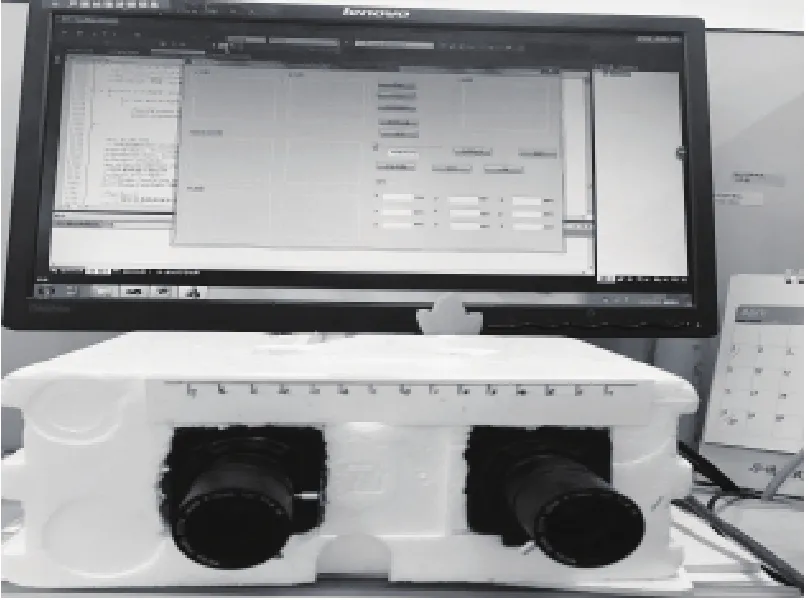
图7 双目视觉立体定位系统
2.3 标定试现验证
标定试验的步骤如下。确保目标在2个相机的视角区域范围,将黑白格棋盘模板静置于2个相机前方。在区域内完成平行移动和旋转动作,试验辅助灯源采用日光灯,防止光线不佳影响拍照质量。为了确保旋转矩阵中向量乘积为0,要注意模板的光轴处于交叉状态(尤其在对标定棋盘模板进行移动时)。为了提高标定系数的准确性,该文试验对棋盘模板进行了20次捕捉拍摄,并使用MATLAB中的工具作为标定工具箱。每次对棋盘进行旋转动作操作时,相机即对棋盘模板进行捕捉拍摄,左、右相机拍摄3次可以得到相机内部参数。标定流程如图8所示。
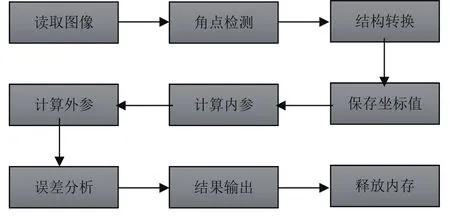
图8 标定实现流程图
得到的标定结果见表2、表3。
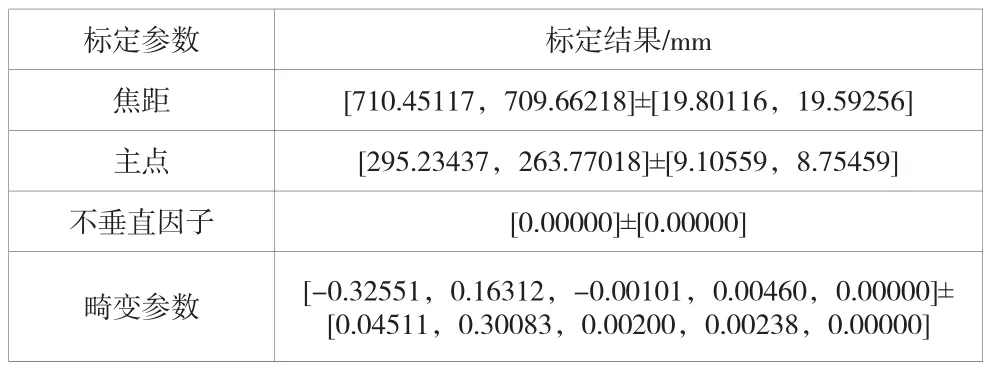
表2 左相机标定结果

像素误差 [0.48684,0.35799]
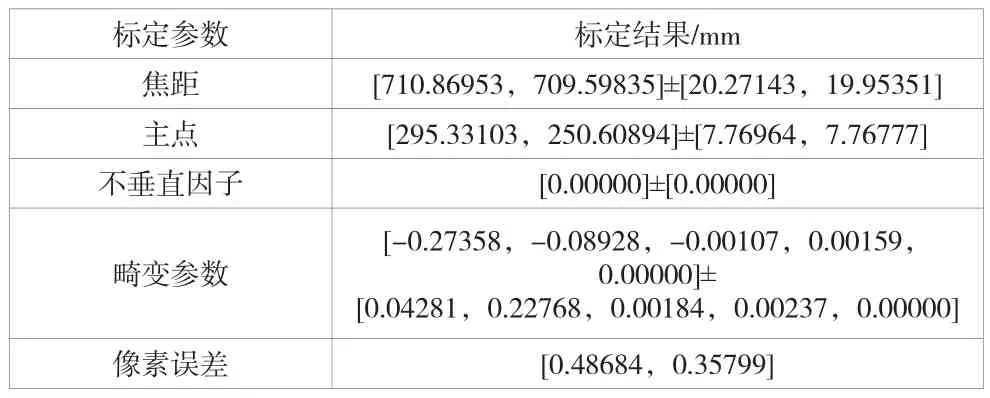
表3 右相机标定结果
3 结论
综上所述,该文选用VS2010开发软件,并调用软件中的Open CV函数库,通过MATLAB软件编译了系统MFC控制程序,搭建了系统验证试验平台。在基于双目视觉三维定位与试验的基础上,从相机的标定、图像的平滑和增强、立体校正与匹配以及特征点的定位4个方面进行了研究。该文虽然实现了双目系统的定位功能,但是由于时间有限,还需要进一步完善和研究。
