顾及无人机影像点云特征的绿地信息分类方法
2022-08-04李佳王明果王云川詹顺段平
李佳, 王明果, 王云川, 詹顺, 段平,*
顾及无人机影像点云特征的绿地信息分类方法
李佳1, 王明果2,3, 王云川1, 詹顺1, 段平1,*
1. 云南师范大学地理学部, 昆明 650500 2. 云南省地质科学研究所, 昆明 650501 3. 云南省地矿测绘院, 昆明 650218
采用无人机影像进行绿地信息分类时, 常利用影像光谱、纹理、形状等分类特征, 忽视了通过无人机影像生成点云构建的数字表面模型(Digital surface model, DSM)和数字高程模型(Digital elevation model, DEM)差异特征。基于此, 提出一种顾及无人机影像点云特征的绿地信息分类方法。方法首先基于摄影测量理论对研究区无人机影像进行空三计算, 并生成点云, 在此基础上构建DSM、DEM和数字正射影像(Digital Orthophoto Map, DOM); 然后, 利用DSM和DEM模型构建地物高度差异模型(normalized Digital Surface Model, nDSM); 最后, 利用可见光波段差异植被指数(Visible-band difference vegetation index, VDVI)对DOM进行植被与非植被分类, 并结合nDSM对植被进行分类。以昆明市呈贡区白龙潭公园为研究区进行绿地信息分类,系数精度达到0.862, 实验表明本文的方法对城市绿地调查具有实际意义。
绿地分类; 无人机; 可见光植被指数; 点云
0 前言
城市绿地分类是城市对绿地规划、设计、建设、管理和统计的技术基础[1]。城市绿地具有放氧、除尘、防噪、防风, 调节小气候等重要生态功能[2], 是城市生态系统的重要组成部分。城市不同区域所要求和营造的绿地类型也各不相同[3]。因此, 根据不同的功能及生境掌握城市绿地信息类别对城市健康发展和提高城市生活环境具有重大意义。
传统的城市绿地分类调查通常依赖于人工调查, 该方法内容详细, 精度较高, 但需要大量的人力物力及财力[4]; 采用从天对地观测技术, 利用遥感卫星进行地物调查不仅能提供准确、大面积的地面信息, 并且其具有多个波段信息, 为城市大面积绿地调查提供了方便[5-7]。但是遥感卫星存在获取数据周期较长、易受云雾等天气影响的问题。
无人机航空遥感作为近年来一种从低空对地观测的技术, 具有机动性强、速度快、成像分辨率及精度高等优点, 为城市绿地信息提取提供了新方法[8-10]。大多数无人机仅搭载可见光相机, 无法获取近红外等可见光之外的波段信息, 因此无法直接构建如归一化差值植被指数(normalized difference vegetation index, NDVI)等进行植被提取。对此, 众多国内外学者根据绿色植物在可见光波段的光谱特征, 构建了多种可见光植被指数[11]。如根据可见光影像的特点提出了可见光波段差异植被指数(visible- band difference vegetation index, VDVI), 并对仅含可见光波段无人机遥感影像的健康绿色植被信息具有较好的提取效果[12-14]。利用无人机遥感影像进行地物识别主要集中于植被覆盖度的提取[15-17], 即侧重于分析无人机影像的光谱特征, 进行单一地物的识别, 而忽视了无人机影像重建点云的空间特征。无人机影像点云包含了各类地物的空间位置和高度特征, 面对同一区域的多种植被时, 根据不同植被种类利用其高度特征可有效对其进行提取与分类。以无人机高光谱数据和数字表面模型(Digital surface model, DSM)为数据源, 利用面向对象技术对红树林湿地进行植被识别, 并证明高度信息可有效分离光谱特征相似但平均高度不同的红树林物种[18]; 此外, 以岩溶湿地区域为主要研究对象, 利用无人机可见光影像结合研究区DSM进行植被识别, 结果表明DSM空间信息对岩溶湿地植被识贡献率较大[19]。因此, 利用无人机可见光影像的光谱特征与空间特征进行植被的识别与分类, 在城市绿地分类中具有较好前景。
本文利用无人机获取的可见光影像, 经空三加密、密集匹配、点云滤波、正射纠正等处理构建影像点云。根据点云生成数字高程模型(Digital elevation model, DEM)、DSM与数字正射影像(Digital Orthophoto Map, DOM), 采用差值运算构建地物高度差异模型(normalized Digital Surface Model, nDSM), 根据无人机影像的光谱特征构建VDVI提取植被信息, 结合nDSM中不同植被的高度信息对植被进行分类, 并对提取结果进行评价分析。
1 研究区及数据
1.1 研究区概况
研究区为昆明市呈贡区白龙潭公园, 如图1所示。整个公园环白龙潭水库而建, 绿地居多, 植被品种繁多, 水杉林居多, 栽培乔木、灌木、草地构成了层次感, 因此选此区域作为典型研究区。
1.2 实验数据
选用大疆精灵4 pro为数据采集设备。航飞前, 在研究区内均匀布设9个控制点, 采用GPS-RTK的方式获取其真实坐标, 用以进行绝对定位。数据采集当天多云微风, 光照适中, 有利于数据获取。采用无人机正射影像采集的方式, 设置航向重叠率85%、旁向重叠率75%, 飞行高度为120米, 共获取292幅影像。
2 顾及影像点云特征的绿地信息分类
绿地信息分类主要包括四个内容: (1)基于无人机可见光影像, 生成点云, 并在此基础上构建DSM、 DEM和DOM; (2)根据点云差异特征构建nDSM; (3)VDVI可见光影像植被信息提取; (4)植被信息分类与精度评价。总体流程图如图2所示。
2.1 基于影像点云的DSM、 DEM与DOM构建
以无人机可见光影像为数据源, 构建DSM、DEM和DOM。首先针对无人机可见光影像进行空中三角测量[20], 即: 以无人机摄影瞬间的POS数据为初始外方位元素, 并结合实测控制点信息进行平差, 求解出每幅影像真实的空间位置与姿态, 以及关键连接点的地面坐标, 生成稀疏点云; 恢复每幅影像的真实姿态后, 在同名像对间利用CMVS和PMVS算法分别对影像表面计算, 识别出多幅影像间的同名点, 生成高密度点云[21]。

图1 研究区域
Figure 1 Study area

图2 总体流程图
Figure 2 The overall flow chart
对生成的离散点云建立DSM即通过进行三角形构建[22], 组成一张能覆盖整个区域的格网, 且构建的三角形不能相交, 每个三角形覆盖的节点的面都被定义为已知信息, 建成三角形的所有点都受三角形的表面限制, 从而精确表达真实地面形态; 根据DSM 的三角网格具有几何约束特点, 对其进行滤波[23], 剔除高于地面的乔木以及建筑物等地物信息, 仅保留地面点信息, 通过构建高程格网, 生成研究区DEM; 由于无人机航摄相机采用中心投影的方式获取地面航空影像, 采用数字微分纠正, 结合研究区DSM, 按一定的数学模型用相关控制点解算, 从原始非正射投影的航摄影像获取具有真实位置的正射影像, 完成单幅影像正射纠正后, 采用多视原理对正射影像重叠区域进行裁切与镶嵌, 得到完整的研究区域DOM。
2.2 地物高度差异模型
DSM包含建筑物、植被等各种地表地物的高程信息, 而DEM是不包含建筑物、植被等各地表地物的高程信息。由于DSM与DEM在地物高程上具有显著的差异特征, 通过差值分析获取nDSM模型即从DSM中消除因地形起伏而造成的高度变化, 仅提取出建筑物、植被等各类地物高度信息, 为地物(乔木、灌木、草地、建筑物等)提取分类提供可靠依据。nDSM计算公式如下:

式中: DSM(,)为DSM在第行第列的高程值, DEM(,)为DEM在第行第列的高程值。利用无人机可见光影像实现密集点云的重建和DOM生成, 并对点云进行滤波与插值获得研究区DEM与DSM模型, 对DEM格网与DSM格网进行求差分析, 得研究区nDSM模型, 研究区DEM、DSM、nDSM如图3所示。
2.3 基于VDVI的植被信息提取
VDVI综合利用了植被在绿光波段的反射及在红光和蓝光波段的吸收特性, 其形式与 NDVI 相似, 能较好地区分植被与非植被, 并且其植被与非植被阈值确定比较简单, 在0值附近[12]。由于无人机影像仅包含可见光波段, 因此采用VDVI识别植被与非植被。VDVI计算公式如下:
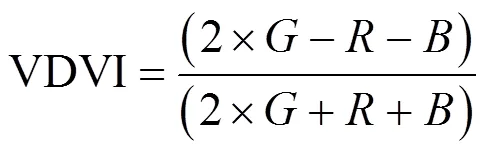
式中:、、分别为DOM在红、绿、蓝三个波段处的像元值。VDVI值域为[-1,1]。根据计算出的VDVI, 利用灰度分割方法对绿地进行提取。
2.4 绿地信息分类规则构建
2.4.1 变异分析
由无人机影像记录了采样时的地物信息, 基于无人机摄影测量原理构建研究区实景三维模型, 从中随机抽取乔木、灌木各30个样本点, 测量其空间高度。根据该样本数据分别计算乔木、灌木的标准差、均值及其变异系数, 结果如下表1所示。结合研究区实际情况与表1可知, 由于研究区内灌木种类较多, 其长势差异较大, 抽样中灌木最低高程为0.36 m, 最大高程为2.65 m, 因此导致研究区内灌木的变异系数值较高, 达到65%; 相比而言, 研究区内乔木长势较为高大, 偶有高程较低的样本, 其中乔木最低高程为2.23 m, 最大高程为6.45 m, 其变异系数为0.29。
2.4.2 基于决策树的绿地信息分类
决策树模型具有准确性高、无需先验知识等优势, 采用决策树对无人机可见光影像进行植被分类, 根据地物的高度将植被分为乔木、灌木及草地。分类规则以地物光谱分析和nDSM模型为标准。首先,根据无人机可见光影像进行各地物类型采样, 提取乔木、灌木和草地在VDVI和nDSM上的特征曲线图; 然后根据特征曲线图确定乔木、灌木和草地的提取阈值, 构建决策树对研究区无人机DOM实现绿地信息分类; 最后利用混淆矩阵计算绿地信息分类精度与系数, 对绿地信息分类结果进行精度评价与验证。
由VDVI提取出的绿地信息, 结合nDSM中不同植被的高度信息对其进行分类。结合研究区灌木、乔木抽样调查结果可知, 灌木高程较离散, 难以通过阈值准确将其与草地、乔木剥离, 通过实验分析, 将0.6 m与2 m分别设定为nDSM中灌木的高程下限与高程上限时, 研究区植被提取与分类效果最佳。同时, 设定nDSM<0.6 m提取为草地, nDSM>2 m的植被提取为乔木, 决策树如图4所示。

图3 研究区无人机成果
Figure 3 UAV results in the study area

表1 研究区植被抽样调查结果
3 结果与分析
3.1 植被信息提取结果
分类前对研究区进行样本选择, 样本选择要均匀分布, 具有代表性。基于感兴趣区域(Region of Interest, ROI)选择样本, 选取实验样本用于光谱、空间分析, 选取验证样本用于后期精度评价。
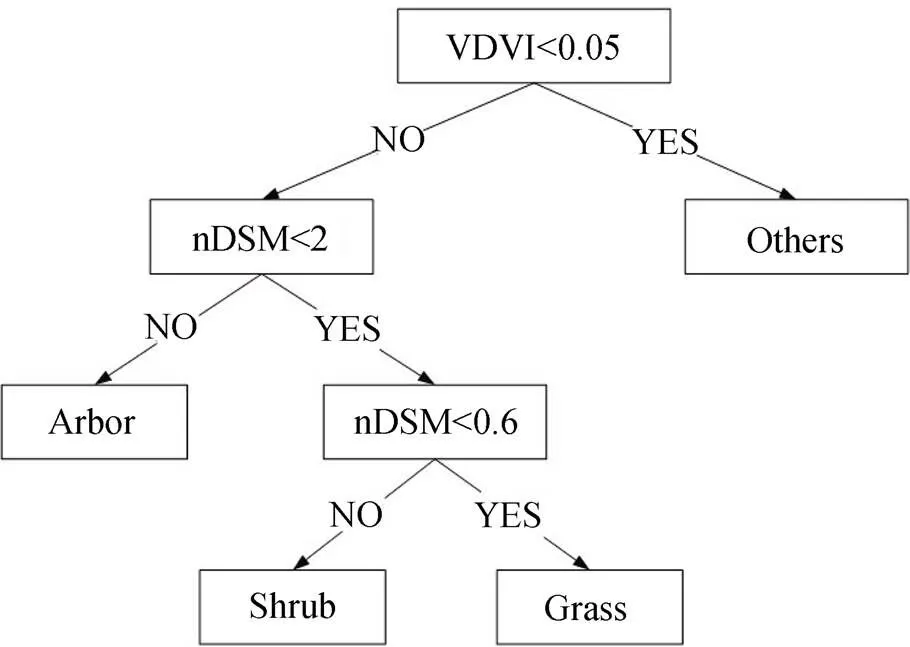
图4 决策树
Figure 4 Decision tree
根据研究区DOM, 通过波段计算得到VDVI, 如下图5所示, 其直方图分布如下图6所示。通过直方图可以发现在0值和0.15值附近有两个明显波峰, 分别代表植被与非植被, 而其间的波谷则位于VDVI为0.05时, 因此选取该波谷处的VDVI值作为阈值, 进行植被与非植被的提取, 提取结果如下图7所示。
3.2 植被分类结果
实验中, 采用VDVI结合nDSM模型, 基于上述决策树分类原则, 根据不同高度对植被进行提取分类, 结果如图8所示, 乔木、灌木、草地等绿地信息被提取出来。

图5 研究区VDVI
Figure 5 VDVI in the study area

图6 研究区VDVI直方图分布
Figure 6 VDVI histogram distribution in the study area
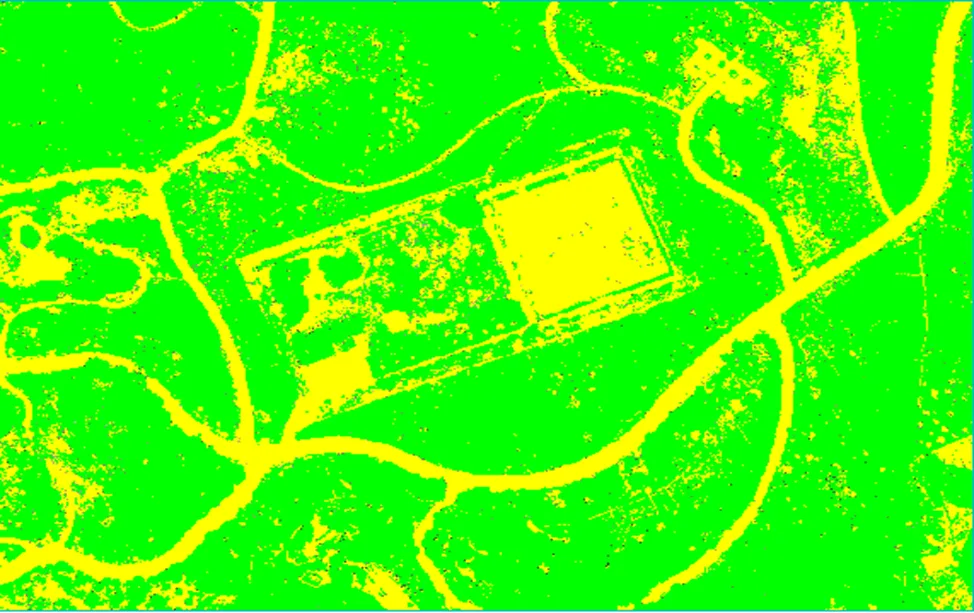
图7 绿地提取结果
Figure 7 Greenbelt extraction results
3.3 精度分析
采用生产者精度(producer’s accuracy, pa)、用户精度(user’s accuracy, ua)、总体精度(overall accuracy, oa)以及系数作为精度评价的指标。生产者精度表示某类别正确分类结果与该类别全部分类提取结果之比, 如下图9中C/A; 用户精度表示某类别正确分类结果与该类别全部实际情况之比, 如下图9中C/B; 总体精度与系数常用以整体评价分类模型的效果, 四个精度评价指标的值域均处于[0,1], 值越大表示精度越高。
混淆矩阵是一种评价分类模型好坏的形象化展示工具, 可以统计一系列评价指标对分类提取结果进行评价。混淆矩阵的建立方式如表2所示,和分别表示被正确分类的乔木和非乔木像元,表示乔木被错分至非乔木的像元,表示非乔木被错分至乔木的像元。根据混淆矩阵, 生产者精度、用户精度、总体精度以及系数计算公式如下式(1)—(4)所示。以实验前选取的验证样本对实验结果进行精度评价, 混淆矩阵见表3, 根据混淆矩阵计算得各类精度如表4所示。
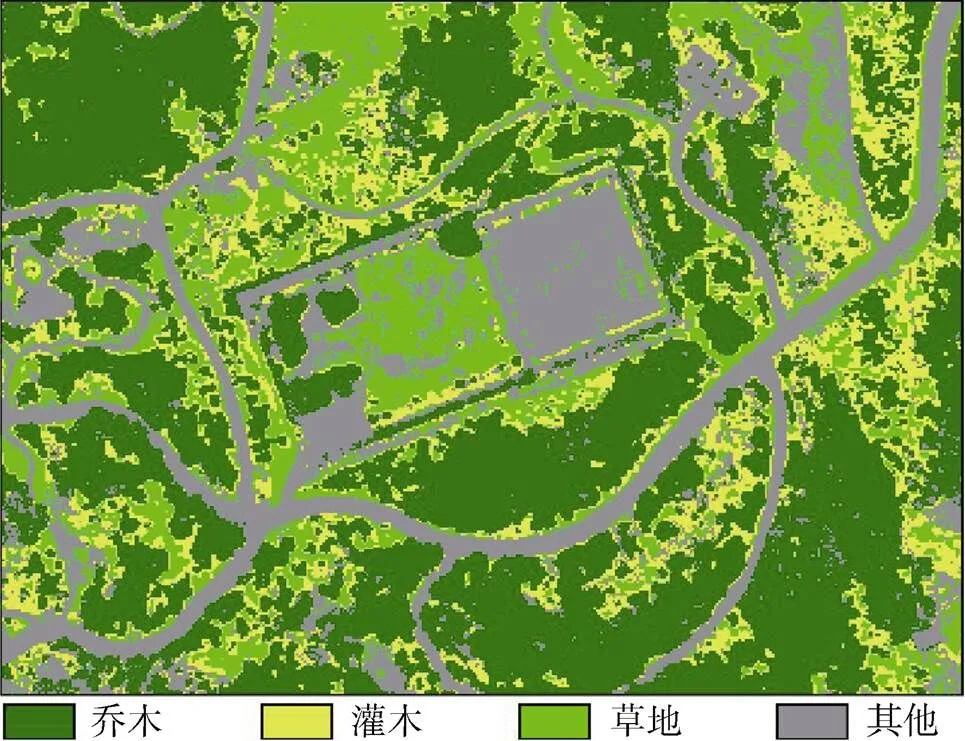
图8 植被提取分类结果
Figure 8 Vegetation extraction and classification results

图9 精度计算示意图
Figure 9 Calculation accuracy schematic
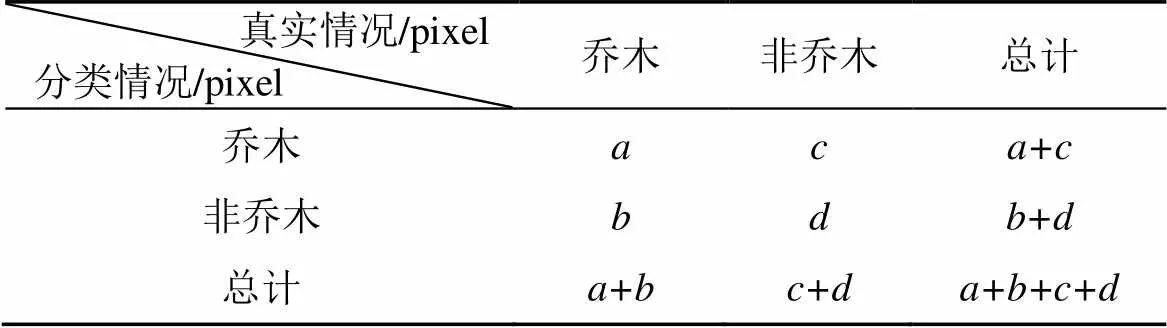
表2 混淆矩阵示意表


式中:为生产者精度,为用户精度,为总体精度,P为偶然一致性的像元比例。

表3 混淆矩阵

表4 分类精度
从绿地分类结果和混淆矩阵中可以得知, 乔木、草地与其他类别提取精度较高, 灌木提取精度相对较低。其中, 草地与其他类别的生产者精度和用户精度都较高, 均在0.88以上, 表明其基本不存在错提和漏提; 乔木用户精度为0.86, 低于其生产者精度, 说明其提取过程中存在一定的错提现象, 灌木其生产者精度与用户精度均偏低, 并且其生产者精度低于其用户精度, 表明灌木存在漏提现象, 结合研究区内灌木变异系数可知, 研究区内灌木高度特征差异较大, 从而导致部分较高灌木被错分至乔木, 以及部分较低灌木被错分至草地。
总体而言, 根据植被的光谱特征和高度信息对其进行分类提取具有比较好的效果, 实验总体分类精度达到91.26 %, Kappa系数为0.869, 综上研究的分类提取方法与实际结果具有较高的一致性, 能够反映真实情况。
4 讨论
利用VDVI与nDSM中含有的空间特征相结合, 对无人机影像进行植被提取与分类, 选择昆明市白龙潭公园为研究区。整个公园以绿地为主, 通过乔木、灌木、地被搭配栽种, 其中乔木占植物品种的80%, 常绿乔木又占乔木的80%, 植物种类丰富, 可代表大多数景观类城市绿地。本研究区域主色调呈绿色, 缺少一定光谱特征有异于普通植被的植被, 并且研究区内建筑物较少, 在植被提取分类时带来的干扰较小, 可能导致本文的方法存在一定的局限性, 尤其对于较为复杂的城市绿地区域。然而本研究方法在一般城市绿地植被提取与分类中精度较高, 仍具有较强的实用性。
VDVI充分利用了植被在绿光波段的反射以及在红光和蓝光波段的吸收特性, 其在不同地物背景下都能够展现出较好的植被提取效果。目前已有相关学者证明VDVI在植被生长良好且与背景地物具有一定差异的农田、草地、林地以及矿山土坡等区域具有较好的提取效果[15,24], 也有学者发现存在少数植被, 如紫叶李, 其光谱特征不同于一般植被, 可能导致提取精度不高[14]; 同时, 利用VDVI提取植被应选择夏季作为无人机可见光影像的主要时间段。对于大多数植被而言, 夏季往往是其生长最旺盛的时期, 其反映出来的光谱特征也最强烈, 可利用VDVI对其准确提取。
无人机可获取研究区域的DEM和DSM,可真实地反映研究区域的地表形态, 空中三角测量作为航空摄影测量中最关键的一步, 其精度决定了DOM与DSM的可靠性。实验共布设9个控制点, 其中5个作为像控点参与区域网平差, 4个点用以检查实验精度, 均采用“GPS-RTK”方式测量。通过计算4个检查点的实测坐标与区域网平差得到的三维坐标之间的误差, 来衡量空中三角测量加密结果的精度。计算得到空三结果其平面中误差为0.062 m, 高程中误差为0.034 m, 误差远小于《数字航空摄影测量空中三角测量规范》中规定的“1:2000平地地形测量平面中误差不超过0.6 m, 高程中误差不超过0.2 m”的要求, 说明本研究所用DOM及DSM产品具有较高几何精度。然而无人机遥感仍存在一定不足, 如平台稳定性不够高、云台相机分辨率不够高等问题, 使无人机产品在边界以及地物相交区域不够精细, 存在一定的模糊、膨胀等现象, 可能会使一些较低的草地与裸土区分不够细致, 从而降低植被提取精度; 目前激光雷达技术(Light Detection and Ranging, LiDAR)也广泛应用于植被三维重建, 激光雷达点云数据量大、精度高, 其中地基式激光雷达技术获取的点云甚至可达毫米级, 相较于无人机影像点云可更大限度地还原植被真实形态。但激光雷达点云表现为多个不连续的空间点, 难以实现对区域空间的无缝研究, 并且不具备丰富的光谱信息, 其实用性仍受到一定的限制。
本研究中, 乔木与草地因其独特的空间高度特征而获得了较好的提取效果, 与之相比, 灌木提取精度略低。其他类别主要为道路、建筑物以及裸土等地物, 其VDVI光谱特征与植被光谱特征差异明显, 提取效果最好; 同时, 草地与道路及裸土等地物位置最近, 而其中长势较低的草类与道路和裸土其高度也较相似, 由于无人机重建点云在地物边界处不够精确, 从而出现了少部分错分的现象; 乔木在提取过程中存在一定的错提现象, 原因是研究区内存在极少灌木其长势高于研究区内高程较低乔木, 导致这部分灌木被错提至乔木; 同时, 由于研究区内灌木种类较多, 长势各不相同, 使灌木在空间特征上与乔木和草地存在一定的交错现象, 从而导致灌木被错分或漏分现象较显著, 因此, 仅通过空间高程特征无法完全将其分类提取。现有研究中除DSM中包含的空间信息外, 有学者[25]充分利用均值、方差、协同性、相异性、熵等多种纹理特征建立分类规则, 在面对具有苔藓、香蒲、裸地、莎草等情况复杂的湿地植被分类时取得了较好的提取效果, 可为本文后续提高提取精度提供研究参考。
5 结论
本文以轻小型无人机为实验设备, 获取研究区域内可见光影像, 综合利用光谱特征构建无人机可见光影像VDVI来提取植被信息, 通过顾及DEM与DSM模型中点云的差异特征, 采用差值运算得到nDSM以获取其空间特征, 基于决策树对研究区进行植被信息的提取与分类。结果表明, 本文方法能够有效提取出草地、灌木、乔木以及其他地物信息, 且具有较高精度。
[1] 王洁宁, 王浩. 新版《城市绿地分类标准》探析[J]. 中国园林, 2019, 35(4): 92–95.
[2] 王野. 基于资源三号卫星影像的城市绿地信息提取方法探讨[J]. 测绘工程, 2014, 23(7): 65–67.
[3] 谢念斯, 刘胜华. 广州市城市绿地空间格局及其关联性分析[J]. 生态科学, 2019, 38(3): 55–63.
[4] 杨柳, 陈延辉, 岳德鹏, 等. 无人机遥感影像的城市绿地信息提取[J]. 测绘科学, 2017, 42(2): 59–64.
[5] 唐超, 邵龙义. 高光谱遥感地物目标识别算法及其在岩性特征提取中的应用[J]. 遥感技术与应用, 2017, 32(4): 691–697.
[6] 卢遥, 卢小平, 武永斌, 等. 综合机载LiDAR与高分影像的煤矿区典型地物提取方法[J]. 测绘通报, 2015(12): 57–59.
[7] 王志波, 高志海, 王琫瑜, 等. 基于面向对象方法的沙化土地遥感信息提取技术研究[J]. 遥感技术与应用, 2012, 27(5): 770–777.
[8] 任泽茜, 丁丽霞, 刘丽娟, 等. 利用无人机遥感监测农作物种植面积[J]. 测绘通报, 2020(7): 76–81.
[9] 翟浩, 唐彬童, 辜彬. 基于无人机影像的边坡植物物种分类[J]. 西北林学院学报, 2020, 35(3): 185–190+ 249.
[10] 魏青, 张宝忠, 魏征. 基于无人机多光谱影像的地物识别[J]. 新疆农业科学, 2020, 57(5): 932–939.
[11] 李鹏飞, 郭小平, 顾清敏, 等. 基于可见光植被指数的乌海市矿山排土场坡面植被覆盖信息提取研究[J]. 北京林业大学学报, 2020, 42(6): 102–112.
[12] 汪小钦, 王苗苗, 王绍强, 等. 基于可见光波段无人机遥感的植被信息提取[J]. 农业工程学报, 2015, 31(5): 152–157+159+158.
[13] 花蕊, 周睿, 王婷, 等. 基于无人机遥感的高寒草原沙化模型及等级划分[J]. 中国沙漠, 2019, 39(1): 26–33.
[14] 李莹, 于海洋, 王燕, 等. 基于无人机重建点云与影像的城市植被分类[J]. 国土资源遥感, 2019, 31(1): 149–155.
[15] 卞雪, 马群宇, 刘楚烨, 等. 基于低空可见光谱的植被覆盖率计算[J]. 水土保持通报, 2017, 37(5): 270–275.
[16] 赵静, 杨焕波, 兰玉彬, 等. 基于无人机可见光图像的夏季玉米植被覆盖度提取方法[J]. 农业机械学报, 2019, 50(5): 232–240.
[17] 徐朋, 徐伟诚, 罗阳帆, 等. 基于无人机可见光遥感影像的耕地精准分类方法研究[J]. 中国农业科技导报, 2019, 21(6): 79–86.
[18] CAO Jingjing, LENG Wanchun, Liu Kai, et al. Object-Based Mangrove Species Classification Using Unmanned Aerial Vehicle Hyperspectral Images and Digital Surface Models[J]. Remote Sensing, 2018, 10(2): 89.
[19] 耿仁方, 付波霖, 蔡江涛, 等. 基于无人机影像和面向对象随机森林算法的岩溶湿地植被识别方法研究[J]. 地球信息科学学报, 2019, 21(8): 1295-1306.
[20] 姚永祥, 段平, 李佳, 等. 基于无人机影像的建筑物实景三维建模方法[J]. 全球定位系统, 2019, 44(5): 100–105.
[21] 姚永祥, 李佳, 段平, 等. 面向塔式建筑物的无人机环拍三维建模方法研究[J]. 地理与地理信息科学, 2019, 35(6): 38–43.
[22] 康帅, 季灵运, 焦其松, 等. 基于地基LiDAR点云数据插值方法的对比研究[J]. 大地测量与地球动力学, 2020, 40(4): 400–404.
[23] 喻龙华, 王雷光, 吴楠, 等. 复杂地形DSM的地面点识别及DEM提取[J]. 测绘通报, 2018(5): 59–64.
[24] 闫利, 莫楠, 费亮, 等. 倾斜影像整体变分模型阴影检测算法改进[J]. 遥感信息, 2017, 32(2): 54−59.
[25] 肖武, 任河, 吕雪娇, 闫皓月, 等. 基于无人机遥感的高潜水位采煤沉陷湿地植被分类[J]. 农业机械学报, 2019, 50(2): 177–186.
Vegetation information classification method considering UAV image point cloud characteristics
LI Jia1, WANG Mingguo2, 3, WANG Yunchuang1, ZHAN Shun1, DUAN Ping1,*
1. Department of Geography, Yunnan Normal University, Kunming 650500, China 2. Yunnan Institute of Geological Sciences, Kunming 650501, China 3. Geological Surveying and Mapping Institute of Yunnan Province, Kunming, Kunming 650218, China
When UAV images are used to classify vegetation information, classification features such as image spectrum, texture and shape are often used, while digital surface model(DSM) and digital elevation model(DEM)constructed by UAV image generation point cloud are ignored. A vegetation classification method considering the point cloud characteristics of UAV image is proposed in this paper. Firstly, based on the photogrammetry theory, the UAV images were calculated to generate image point cloud. DSM, DEM and Digital Orthophoto Map(DOM) were constructed. Then, the normalized Digital Surface Model(nDSM) is constructed by using DSM and DEM. Finally, the Visible band difference vegetation index (VDVI) is used to classify vegetation and non-vegetation in DOM. nDSM is used to distinguish different vegetation types. Taking Bailongtan Park in Chenggong District of Kunming City as the study area for green space information classification, theaccuracy is 0.862. The experimental results show that the method of this paper is of practical significance to the investigation of urban green space.
vegetation information classification; UAV; the Visible band difference vegetation index; point cloud
李佳, 王明果, 王云川, 等. 顾及无人机影像点云特征的绿地信息分类方法[J]. 生态科学, 2022, 41(5): 11–18.
LI Jia, WANG Mingguo, WANG Yunchuang, et al. Vegetation information classification method considering UAV image point cloud characteristics[J]. Ecological Science, 2022, 41(5): 11–18.
10.14108/j.cnki.1008-8873.2022.05.002
S157.2
A
1008-8873(2022)05-011-08
2020-08-25;
2020-10-22
国家自然基金项目(41961061); 云南省基础研究计划项目(2020FB059); 云南省教育厅科学研究基金(2021Y502); 云南师范大学2021年研究生科研创新基金(YJSJJ21-B82)
李佳(1984—), 女, 湖北公安人, 博士, 副教授, 博士生导师, 主要从事无人机影像处理与应用研究, E-mail: keguigiser@163.com
段平, 男, 博士, 副教授, 主要从事无人机影像处理与应用研究, E-mail: dpgiser@163.com
