基于物联网监控的智能驱鸟器设计
2022-08-04丁宇浩温权龙管子虞谷海清
丁宇浩, 李 栋, 温权龙, 管子虞, 高 强, 谷海清
(天津理工大学 电气工程与自动化学院,天津 300384)
0 引 言
根据南方某地区近20年来电网输电线路跳闸故障情况统计发现:该地区电网年均鸟害故障发生率达10%左右,鸟害已成为仅次于雷击灾害的输电线路跳闸第二大原因。研究发现:鸟巢故障成为鸟害故障的首要故障类型[1-2]。鸟类筑巢所用材料会破坏输电线路的保护措施,加大导电和引雷等意外地发生极易引起线路短路,鸟类在变压器之间穿梭等行为容易撞击电线造成输电受阻的现象,啄食复合绝缘体引起线路故障和排泄的粪便造成的闪络效应,严重危及电网安全运行,给能源部门和人类生产、生活造成重大经济损失[3]。研究能够高效驱赶鸟类的设备十分有必要。
目前市场上已有的驱鸟设备,如超声波驱鸟器、激光驱鸟器、防鸟刺、反光风镜驱鸟器等[4-5],这些设备都存在不足,可以归纳为以下几点:
(1) 电子驱鸟器生产成本高,工作耗能大,且工作模式单一;
(2) 普通驱鸟刺和反光风镜不能有效克服鸟类的适应性;
(3) 容易受自然环境的影响而损害,同时传统驱鸟器无法及时回馈故障信息,需要工作人员进行巡逻和检查[6];
(4) 缺乏针对性,针对不同工作环境,同一种驱鸟手段不一定能发挥相同的驱鸟效果。
经资料查证:鸟类和人类的听力范围存在差异,人类很难感应到超过20 kHz的声波,但鸟类可以察觉到20 kHz以上的声波,20~35 kHz的声波会使鸟类产生不适[7],在空旷且人迹稀少的乡间和山林,采用鸟类天敌的声音可以更好地驱鸟;在晚上,采用高亮LED闪烁的方式惊吓靠近的鸟类[8-9],也可以达到很好的驱鸟效果。为针对不同环境如何高效驱鸟,同时又能保护驱鸟器免遭损坏,综合现存驱鸟产品的优点并了解了鸟类的生活习性,研究开发了一个以太阳能为主要供能方式,多普勒雷达探测[10-11],多种环境模式切换以及可人为遥控的嵌入式智能驱鸟器。智能驱鸟器依靠嵌入主控芯片控制,设备经过插接不同的传感器模块可具有多种工作模式:城市环境、乡间环境和山林环境等工作模式,所有驱鸟器都由统一的上位机进行远程监视和遥控来实现区域化高效率驱鸟的目的。
1 硬件系统设计
驱鸟器设计采用STM32F407ZGT6作为嵌入式核心,微波雷达作为鸟类检测模块,使用太阳能板供电,以蓄电池储电的方式为设备供电,采用雨水传感器和光敏传感器作为环境检测模块,以天敌的声音、变化的频率声波和闪烁高亮的LED作为主要驱鸟手段,保证驱鸟器的智能性与实用性;结合物联网技术,实现远程监测设备运行状况和记录驱鸟情况。总体结构如图1所示,实物连接如图2所示。
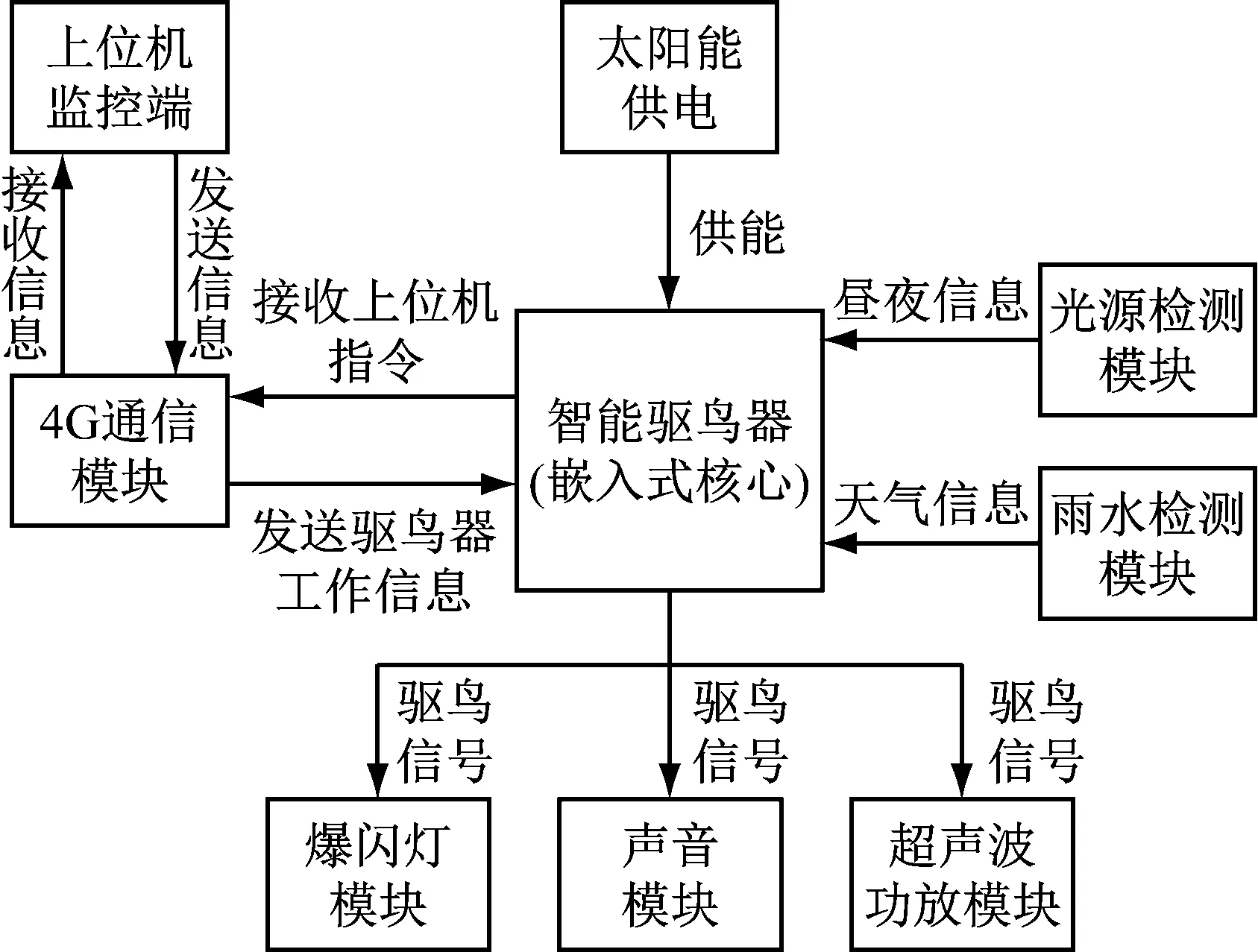
图1 硬件结构组成

图2 智能驱鸟器实物
1.1 嵌入式最小系统
控制核心采用以Cortex-M4核心的STM32F407ZGT6芯片,控制核心模块通过对各功能模块进行综合控制来实现驱鸟、采集驱鸟器工作状态信息、传输驱鸟结果、显示驱鸟次数等功能。同时也可满足本系统要求的体积小、功耗低、工作稳定性好等特点[12]。
1.2 雷达模块
雷达运动传感器是利用多普勒雷达原理设计的微波移动物体探测器,额定工作电压是(5±0.25) V,探测距离为2~16 m连续可调,发射频率为10.525 GHz。电路原理如图3所示。
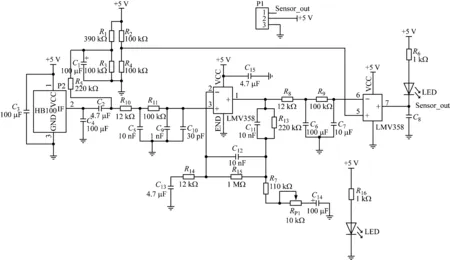
图3 雷达模块电路原理
相对于红外传感技术,微波雷达传感技术具有非接触、抗雨雾粉尘等独特优点,逐渐成为近程范围检测的一种重要传感手段[13]。微波传感器是检测周围物体反射的微波,然后将微小信号经过放大,再通过内部的比较电路将信号转化为数字信号输出,便于单片机处理。其多普勒频率
式中:v为目标速;Ft为发射频;c为光速;θ为目标移动方向与模块轴之间的夹角。
雷达模块具有抗干扰性能强,工作范围大,检测灵敏,穿透性强且不易损坏等特点,可实现快速准确地检测一片区域内是否有鸟类靠近电线杆或电塔等输电设施的功能。雷达探测的性能与传统红外探测对比见表1。

表1 微波雷达与红外热释电传感器性能比较
1.3 电源模块
供能模块主要由9 V 5 W单晶太阳能电池板,DC12V 4 A蓄电池通过稳压电路与嵌入式主体进行连接,稳定输出5 V电压,电路原理如图4所示

图4 稳压电路原理
通过太阳能板供电优点在于零污染,稳定性能强。蓄电池和太阳能板中间连接一个防反接保护二极管,可实现白天充电板向锂电池内充电,夜晚蓄电池不会回流供给太阳能板的功能。稳压变换器不仅可以调试出各种电压测试系统的工作电压,而且能保持电源稳定地向单片机和输出模块供电。
1.4 光敏模块
光敏模块的工作电压为3.3~5 V,LM393基准器件具有信号清晰,波形好,转向能力强的特点。输出数字信号,如果环境光强度未达到指定阈值,则输出电平为高;反之,则输出电平为低。
1.5 扩音器模块
扩音器模块由特制的喇叭和功放模块组成,可以发出20~25 kHz的声波,也可以播放内存中的天敌叫声。功放模块板搭载有TDA2030A音频功放芯片、喇叭接线座及可调电阻,可直接通过引脚输入音频信号,工作电源为6~12 V,电路原理如图5所示。
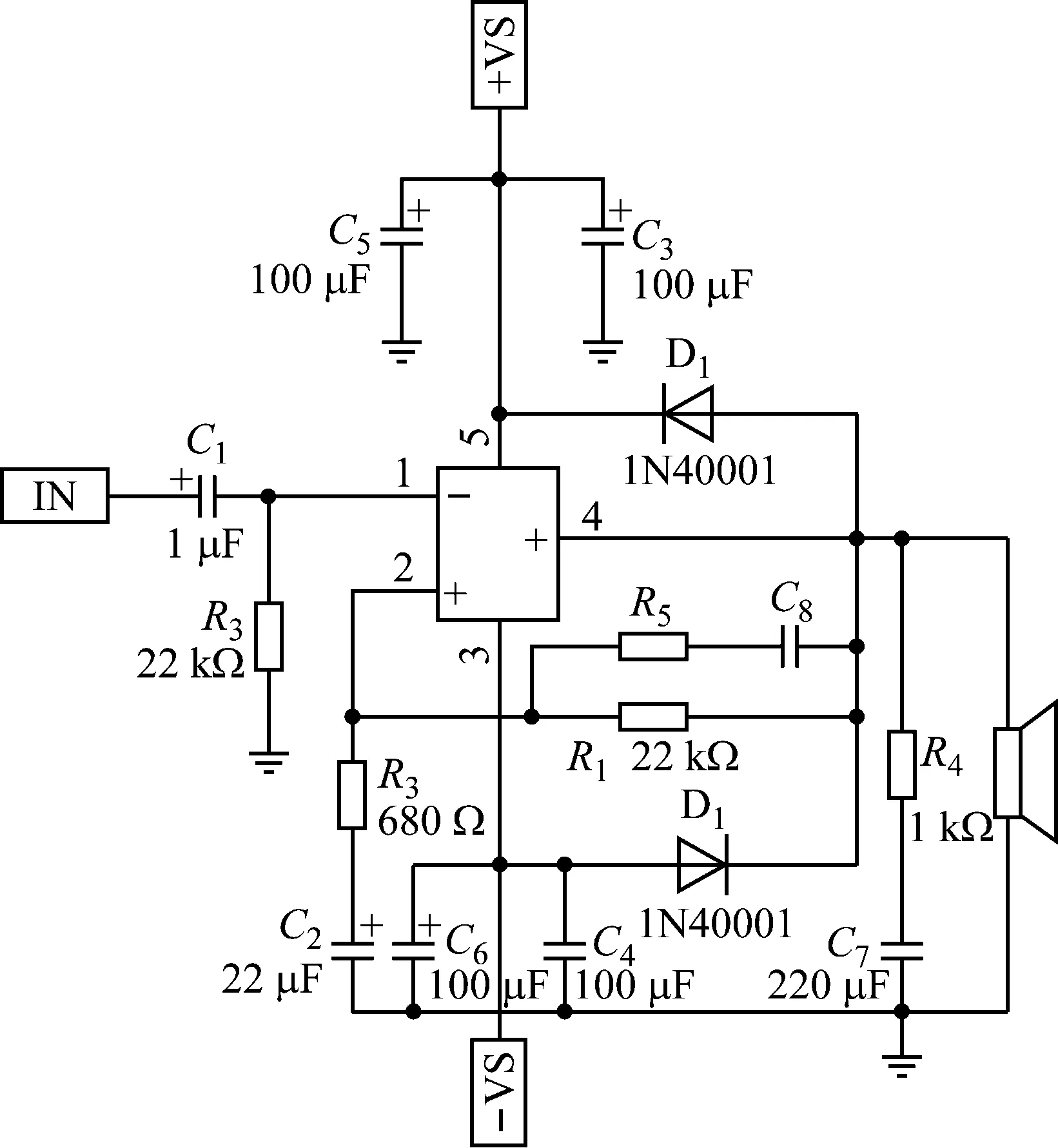
图5 功率放大电路原理
1.6 雨水模块
雨滴传感器采用双面材料,用镀镍处理表面,具有对抗氧化、导电性及寿命方面更好的性能;使用宽电压LM393比较器输出,工作电压为3.3~5 V。将天气状况转成数字信号或模拟信号输出,配电位器调节灵敏度。DO数字输出连接单片机的AD口检测是否有雨。
1.7 4G无线通信模块
在物联网通信模块由ME906E 4G、MCU显示屏和阿里云平台服务器3部分组成。主控制板搭载了liteos[14]操作系统,该操作系统功能强大,任务执行效率高。驱鸟器上的ME906E模块负责与阿里云平台之间的通信,操作界面与工作数据可通过MCU显示屏显示。
2 软件系统设计
为实现在不同环境中,驱鸟器既可减少对人的影响,又可在其所处地环境中最大程度地实现驱鸟效果,本设计根据同一区域不同环境中各种驱鸟效果的差异性,筛选针对不同环境的最佳驱鸟方式,并采用物联网将这一区域的所有驱鸟器统一遥控,驱鸟器分类如下。
(1) 在城市。白天,驱鸟器通过雷达模块检测周边是否有鸟类经过,如果检测到鸟类,驱鸟器发出持续变频率的超声波来驱逐鸟类;晚上,驱鸟器自动转换成夜间模式使用爆闪灯驱鸟,避免在城市中超声波干扰人类休息和达到更好的驱鸟效果。同时,当遇到恶劣环境时,会切换至低功耗模式。
(2) 在乡间。白天驱鸟器通过雷达检测周边是否有鸟类经过,如果检测到鸟类,驱鸟器发出天敌的叫声来驱逐鸟类;晚上,驱鸟器会自动转换成夜间模式使用爆闪灯驱鸟。当遇到恶劣环境时,会切换至低功耗模式。
(3) 在山林。驱鸟器在正常工作环境中仅采用声波和超声波两种手段进行驱鸟,当遇到恶劣环境时,会切换至低功耗模式。
其区域化网络结构如图6所示,系统功能结构如图7所示。
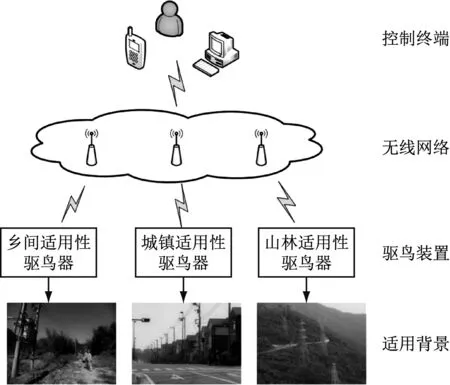
图6 区域化智能驱鸟网络结构

图7 驱鸟器系统功能
(1) 当驱鸟器开启并处于城市工作环境模式。核心控制芯片会下达指令通过雷达模块实时探测周围是否有鸟类靠近。如果没有鸟类靠近,在白天模式时扩音器会每隔15 s发出2 s的变频超声波来预防鸟类靠近;在夜晚,驱鸟器会切换成每隔15 s LED闪光灯会闪烁一次来达到相同的目的。如果雷达检测到有鸟类靠近驱鸟器,白天驱鸟器会周期性输出变频超声波进行驱鸟,直到鸟类离开雷达传感器的检测范围;晚上,驱鸟器的LED闪光灯会周期性地闪烁直到鸟类离开检测范围,当驱鸟器处于恶劣天气时,例如下雨天时,通过雨水模块,主控芯片将驱鸟器从正常的工作模式转为雨天的低功率模式,当周围环境转变成为可以正常工作的环境时,驱鸟器恢复到正常的工作模式,工作流程如图8所示。

图8 城市驱鸟器工作流程
(2) 当驱鸟器开启并处于乡间工作环境模式。与城市工作模式大致相同,乡间工作模式驱鸟器将超声波驱鸟方式改换成播放天敌叫声的声音驱鸟。白天没有检测到鸟类时,驱鸟器每15 s播放一次天敌的叫声,当检测到鸟类靠近时,驱鸟器会随即切换天敌叫声驱鸟,晚上的驱鸟模式与城市工作模式相同。
(3) 当智能驱鸟器开启并处于山林工作环境模式。控制芯片会下达指令通过雷达模块实时探测周围是否有鸟类靠近。如果没有,扩音器会每隔15 s发出一次的鹰的声音来预防鸟类靠近,如果检测到有鸟类靠近驱鸟器,驱鸟器会周期性输出鹰的声音和变频超声波进行驱鸟,直到鸟类离开传感器的检测范围。当驱鸟器处于恶劣天气时,例如下雨天时,通过雨水模块,主控芯片将驱鸟器从正常的工作模式转为雨天的低功率模式,当周围环境转变成为可以正常工作的环境时,驱鸟器恢复到正常的工作模式,工作流程如图9所示。

图9 山林驱鸟器工作流程
每进行1次上述3种驱鸟工作后,4G模块便会向云端服务器发送一次驱鸟的结果信息,此信息会储存在云端数据中用于记录和参考。
3 远程管理系统的实现
为实现远程访问,系统采用django、uwsgi和nginx在阿里云平台[15]搭建一个可用公网访问的网页,负责管理人员通过上位机访问网页端对驱鸟器工作状态进行控制,并采用图表的方式查看驱鸟的统计数据。同时在阿里云平台运行一个python脚本,该脚本程序负责接收驱鸟器发来的tcp链接与信息,将驱鸟器被触发的次数,环境信息写入数据库进行统计,还可向驱鸟器发送消息,pyhon脚本还会与前端界面通信以此来获取用户与网页端的交互信息并且直接将交互信息发送给驱鸟器,以此达到远程监控和控制驱鸟器工作状态,联网工作流程如图10所示。

图10 通信功能
云端服务器不仅负责接收各地区不同功能的驱鸟器工作数据还可远程操控驱鸟器:当驱鸟器遇到解决不了的问题或者出现驱鸟器错误工作情况,通信模块会及时向上位机报警,上位机会远程遥控驱鸟器重启或者模式转换;当某个单一的驱鸟器出现故障时,维护人员可通过上位机快速查找故障驱鸟器的位置进行维修,以减轻维修组需要定期巡逻的负担。维修示意如图11所示。
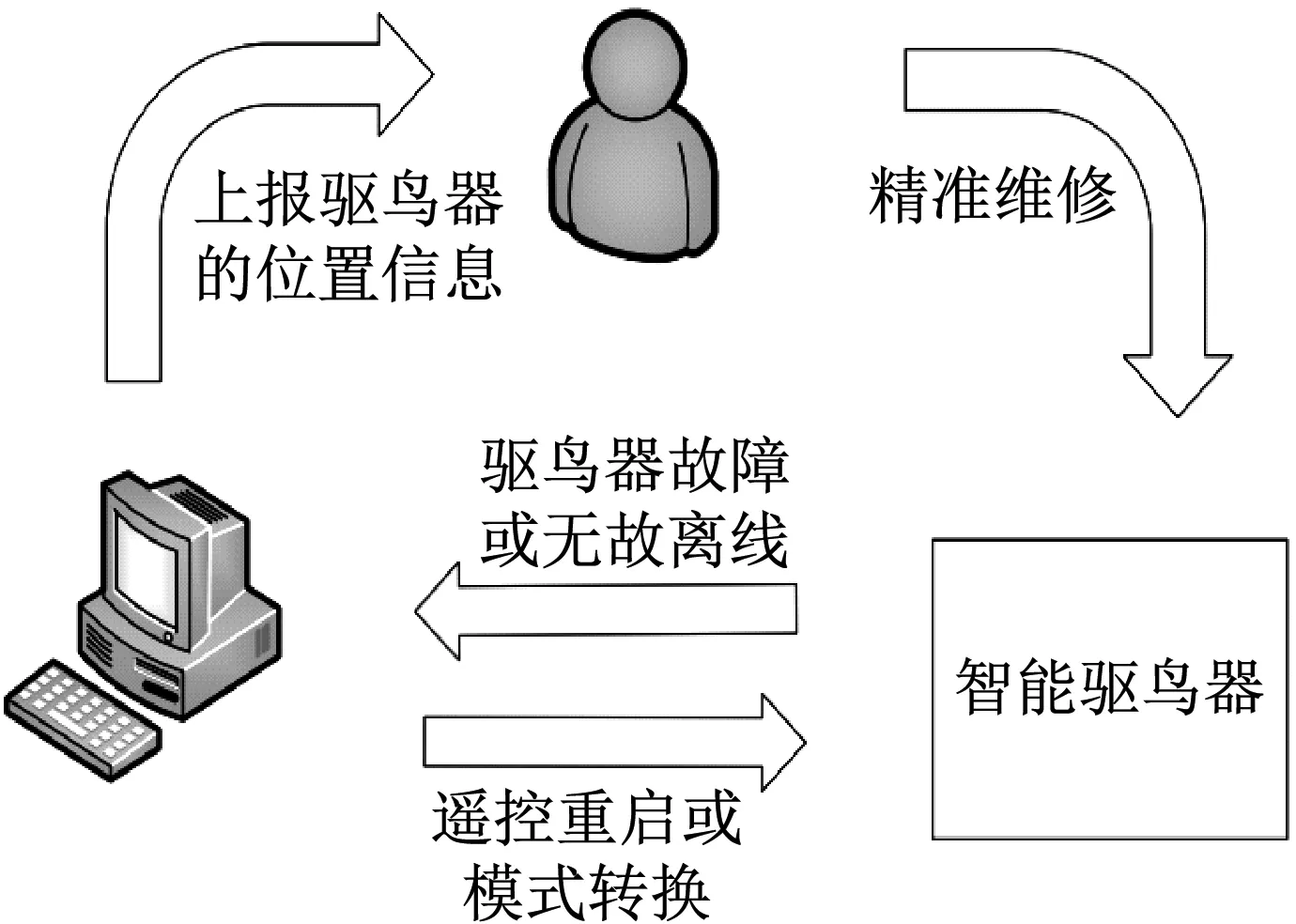
图11 驱鸟器故障反馈
4 结 语
本设计实现了一种持久性、低功耗、高性价比、耐用、适用范围广的智能化自动化驱鸟设备,通过服务器进行后台综合管理。可以满足山林地区的输电线路和城镇地区的输电线路的不同环境,针对不同区域鸟类特点,模块化构成不同驱鸟方式的设备单元,加强了驱鸟的针对性,提高驱鸟效果,保护输电线路安全,为电力部门节约运维成本。经实际测试,系统运行稳定可靠,可满足实际需要。
在未来还可将统计的数据做成大数据来统计鸟类的生活习性,观测鸟类的生态并以此来提高驱鸟器的工作效率和为以后的驱鸟设备提供更好的参考资料。
