路面连续激光点云中车辙三维特征提取方法研究
2022-08-03刘如飞柴永宁
刘如飞,柴永宁,陈 敏
(1.交通运输部公路科学研究院,北京 100088; 2.山东科技大学 测绘与空间信息学院,山东 青岛 266590)
0 引言
由于受各类自然环境影响,在行车荷载作用下沥青路面容易发生局部变形,轮迹带逐渐变形下凹,两侧鼓起形成车辙。车辙会使得路面平整度下降,影响行车安全[1-2];同时车辙削弱了路面整体强度,会进一步诱发其他路面病害。因此,路面车辙病害的监测预防至关重要。
传统车辙测量多利用人工直尺法或包络线法对断面车辙深度进行分析,两种方法利用推包和推波产生的波峰、波谷进行测量,会存在一定误差[3-5]。目前,国内外对于路面病害的检测正由人工测量向移动测量转变。通过移动测量系统快速获取海量路面激光扫描数据,能够高效准确地进行路面病害检测,为公路养护管理提供数据支撑[6-7]。
吴智山等[8]利用单点激光器的测量方法采集路面断面数据,设计并开发出相应的车辙测量仪器,通过对系统测量误差进行研究分析,证明了共梁式非均匀分布13点激光器用于车辙检测的可行性[9-12],但由于点数有限,密度较小,导致道路横断面数据不连续,同时检测车的行驶偏移也会导致车辙测量误差;Tsai等[13]通过控制路面横断面上点的数量,研究了横向点的数量与车辙断面提取精度的关系,证实了横向点数量对车辙断面提取精度的影响;马荣贵等[14]进一步深入研究横向点的密度对车辙断面提取精度的影响,得出了随着传感器数目的增加,车辙测量最大误差在横向轮廓点的数量小于21时减小较快,大于33时衰减缓慢的结论;李清泉等[15]使用Delaunay三角网进行标定点建网与激光扫描线物方坐标解算的方法快速获取足够密集的车辙横断面剖面线,用于车辙分析;洪梓铭[16]和孙权[17]等则根据激光扫描数据的坐标分布特征生成特征图像,基于图像处理技术快速获取车辙等路面病害信息。
针对上述问题,本研究提出了一种基于连续激光点云的路面车辙精细三维特征提取方法。考虑到图像像素相对于离散点云较好的连续性和二维图像处理相对于三维点云数据处理的高效性,本研究根据正常路面和车辙目标的空间分布差异生成多元化特征图像,综合运用图像处理和点云拟合分析方法提取车辙平面轮廓线和横断面轮廓线,进行车辙精细三维特征表达。
1 车辙精细三维特征提取
以车道标线为边界约束,从路面点云中提取单车道点云,作为提取车辙精细三维特征的基础数据。路面点云数据及车道标线如图1所示。
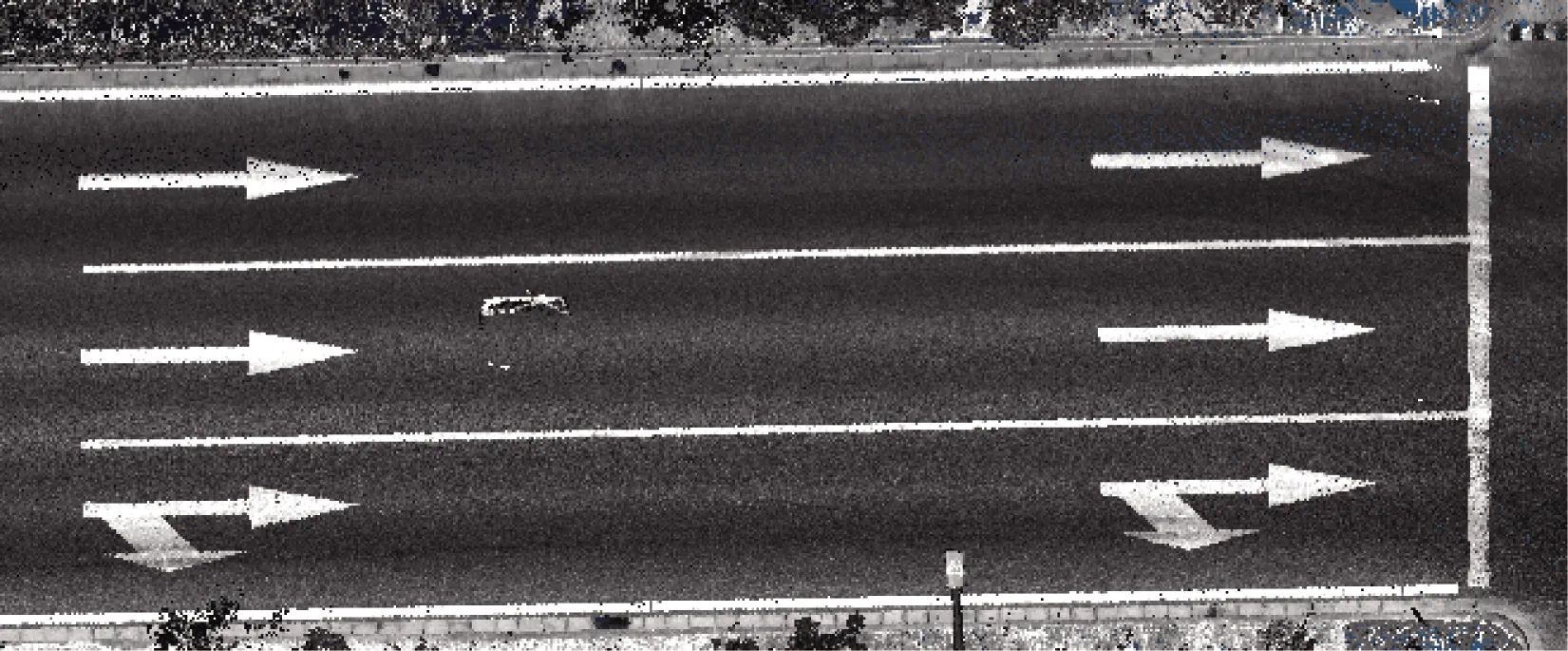
图1 原始点云数据(强度)Fig.1 Original point cloud data (intensity)
方法为首先将路面激光点云数据处理转化成高程特征图像、坡度特征图像和坡向特征图像,基于图像提取车辙平面轮廓线;再基于断面密集的激光扫描线点精细提取车辙轮廓边界点和断面轮廓线;最后运用精确轮廓点修正平面轮廓线,实现车辙精细三维特征表达。路面车辙精细三维特征提取流程如图2所示。

图2 路面车辙精细三维特征提取流程Fig.2 Flowchart of fine 3D feature extraction of pavement rutting
1.1 基于特征图像的车辙纵向平面轮廓线提取
(1)点云数据预处理
一般情况下,车辙特征表现为沿道路纵向为直线形,沿道路横断面方向为“w”形,有先下降后上升、再下降再上升的变化规律。为了消除路面横向排水坡和纵向上下坡对车辙特征提取的影响,本研究采用多元线性回归方法拟合路面平面并将点云数据高程进行归一化处理,即将点云数据z坐标作为因变量,x和y坐标为两个自变量,建立二元线性回归模型,如式(1)所示:
z=b0+b1x+b2y+e,
(1)
式中,b0,b1,b2,e为平面方程系数。抽样点云数据计算得路面平面方程一般式,如式(2)所示:
b1x+b2y+(-1)z+b0=0。
(2)
以该平面为约束,遍历计算各点到该平面的距离,并以此作为点云的相对高程值。点到平面的距离计算方法如式(3)所示:
(3)
式中,x,y,z为路面点的三维坐标;d为路面点到拟合路面平面的距离,即归一化后相对高程。
(2)路面特征图像生成
获取车道点云平面图像投影范围,即由xmin,xmax,ymin,ymax确定的最小外接矩形,设定像素分辨率Pixr和Pixc,其中Pixr和Pixc分别为图像沿行和列方向的分辨率,由此计算图像尺寸,计算公式如式(4)所示:
(4)
预设一张尺寸为Row行,Col列的空白图像,遍历计算点云各点在图像中的位置,并将1个像素对应的多个路面点最小相对高程拉伸到uint8(0~255)灰阶上,作为该像素的灰度值。点云到像素的坐标换算方法如式(5)所示:
(5)
高程到灰度值的拉伸计算方法如式(6)所示:
(6)
式中,zmax和zmin分别为归一化后相对高程最大值和最小值。通过以上方法获取路面高程特征图像,进一步采用中值平滑方法进行滤波去噪,获取更加平滑的路面高程特征图像。
对路面高程特征图像求梯度,梯度向量值作为路面坡度特征图像对应位置的灰度值,生成坡度特征图像;进一步将梯度向量方位角换算为灰度值填入路面坡向特征图像对应像素位置,生成路面坡向特征图像。路面特征图像如图3所示。
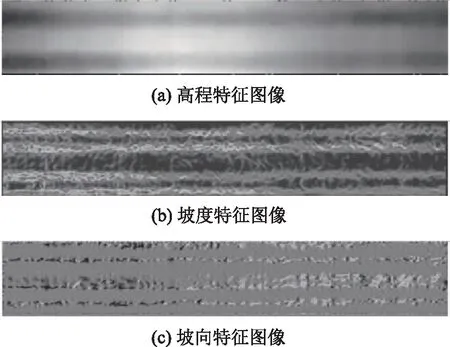
图3 路面特征图像Fig.3 Pavement feature images
(3)车辙平面轮廓线提取
车辙位置特征图像像素灰度值特征如表1所示,高程特征图像中由路面到车辙底点呈倒“S”形变化,由车辙底点到路面点呈现“S”形变化,“S”或倒“S”形腰部处为高程特征图像横断面拐点。对高程特征图像求二阶导并对二阶导图像二值化:二阶导数为0处即为高程特征图像横断面拐点,其灰度值为1,其他位置灰度值为0。坡度特征图像中路面和车辙底点处坡度较小,车辙侧壁与路面点交汇处有突变,与车辙底点交汇处有突变。对坡度特征图像进行二值化:以坡度特征突变处为1,其他位置处为0。坡向特征图像中路面点由于其平坦度和破损的粗糙度呈现各方向差异性,车辙侧壁由于上下坡方向相反,呈现明暗分布,下坡灰度值较小,呈灰色,上坡灰度值较大,亮度较高,车辙下坡和上坡过渡处即车辙底点,坡度接近0或2π。对坡向特征图像求导生成二值图:以导数突变处为1,其他位置处为0。
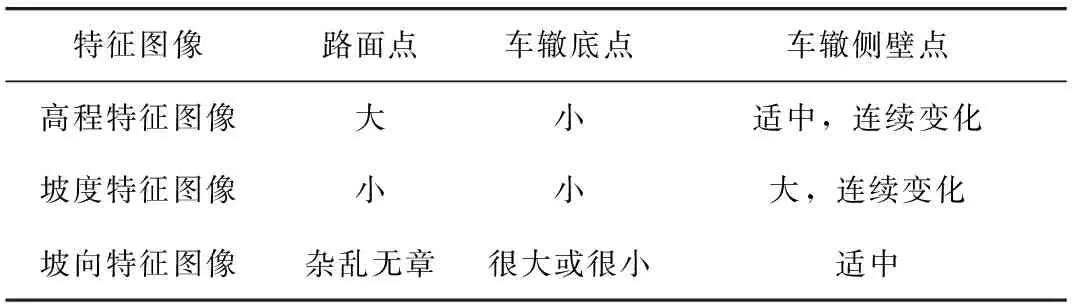
表1 车辙不同位置处特征图像像素灰度值特征Tab.1 Gray value characteristics of feature image pixels at different positions of rut
将3种特征图像生成的二值图叠加显示,如图4所示。图中黑色线图层为高程特征图像提取结果,提取内容为车辙侧壁中线;灰色线图层为坡度特征图像提取结果,提取内容为车辙侧壁上下边缘轮廓线;浅灰色线图层为坡向特征图像提取结果,提取内容为车辙凹槽底点连线及一些路面杂乱线。

图4 特征图像二值化结果Fig.4 Feature image binarization result
对特征图像分析结果中黑色图层进行纵向约束聚类分析,从上到下黑色线依次编号为①,②,③,④。首先滤波去除孤立点或较小线段;其次通过区域生长获取任意1条曲线上最长线段;最后通过曲线走向约束,采用连通性分析技术提取4条完整的曲线。
以黑色图层4条曲线为约束条件,删除灰色图层中①号和②号侧壁中线之间的部分,删除灰色图层中③号和④号侧壁中线之间的部分;删除浅灰色图层中①号侧壁中线以上部分,删除浅灰色图层中②号和③号侧壁中线之间的部分,删除④号侧壁中线以下部分。
对余下灰色、浅灰色图层分别再进行聚类、滤波、区域生长和连通性分析处理,最终获取车辙平面轮廓线,如图5所示。图中类型Ⅰ的4条曲线表示为车辙凹槽上边缘轮廓线;类型Ⅱ的2条曲线表示为车辙凹槽底部中线。

图5 车辙平面轮廓线提取结果Fig.5 Extracted rutting plane contour line
1.2 基于扫描线点拟合的横断面轮廓精提取
路面激光点云采用连续扫描线方式采集,扫描线上相邻点间距可达1 cm,任一点均存储扫描线编号,进而可快速获取该扫描线上其他所有点;然后通过中值滤波,去除扫描线上噪声,获取平滑的路面横断面扫描线点。
对平滑后扫描线密集点进行曲线拟合分析,通过曲线求导获取4个拐点即车辙凹槽侧壁边缘的轮廓点;以同侧车辙两个车辙凹槽侧壁边缘点为约束,位于两点之间且一阶导数为0 的点即为车辙凹槽底部中线点,如图6中的大圆点所示。
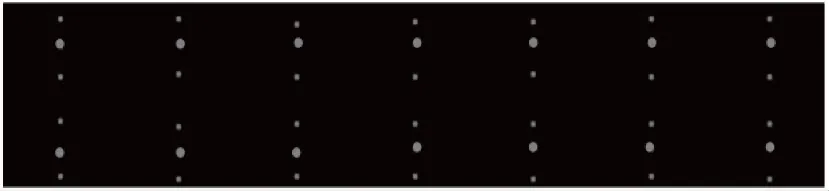
图6 车辙凹槽轮廓点精细提取结果Fig.6 Extracted fine rutting groove contour points
以车辙凹槽侧壁轮廓点为约束,将车辙凹槽侧壁轮廓点之间的扫描线点拟合为曲线,作为车辙断面轮廓线。
1.3 车辙平面轮廓线的修正
基于特征图像的轮廓钱提取方法能较好地保留道路纵向线状分布特征,但车辙凹槽侧壁边缘轮廓线和凹槽底部中线提取位置存在不准确的问题,因此还需运用精确提取的车辙凹槽侧壁轮廓点和凹槽底部点对其位置进行修正。将车辙平面轮廓线进行分段处理,然后计算分段范围内精确的轮廓点到待修正轮廓线的平面距离,对距离差值进行最小二乘平差拟合,获取轮廓线上不同位置的修正参数,进行边缘轮廓线和凹槽底部中线的修正。
最后用修正后的车辙凹槽侧壁边缘线、凹槽底部中线和车辙横断面曲线共同表达车辙精细三维特征。车辙精细三维特征表达效果如图7所示。其中底面为初始路面点云,Ⅰ号标记线为车辙凹槽侧壁边缘线,Ⅱ号标记线为车辙凹槽底部中线,垂直于Ⅰ,Ⅱ的标记线为车辙断面轮廓线。
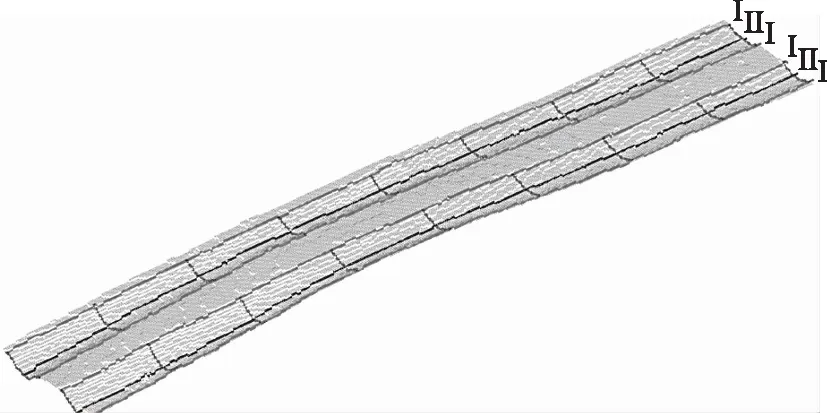
图7 车辙精细三维特征表达Fig.7 Expression of fine rutting 3D feature
2 试验结果与分析
本研究以车载激光移动测量系统采集的某道路路面连续激光点云数据为基础进行试验验证。获取任意位置的4个横断面,以连续激光点云扫描线横断面为分析对象,分别用传统方法和本研究方法提取车辙横断面,按照文献[18]的方法计算单个车辙宽度、深度和横断面面积并进行比较分析。
提取某断面位置的点云数据,生成标准断面,如图8中菱形标志曲线所示;用传统方法获取的路面相对深度,生成断面曲线,如图8中三角形标志曲线所示;本研究方法以车辙平面轮廓为限制条件获取拟合后的断面,如图8中圆形标志曲线所示。

图8 车辙横断面曲线对比Fig.8 Comparison of rutting cross-section curves
对上述方法生成的车辙断面进行信息提取,将传统方法及本研究方法的提取结果与基于点云的直接提取结果进行对比,如表2所示。两种方法提取的车辙宽度都不超过4 cm,相对误差小于5%;传统方法提取的车辙深度与点云断面提取结果的差值大于1 mm,而本研究方法提取结果的差值小于0.5 mm,采用本研究方法提取的车辙深度信息明显优于传统方法;对于车辙横断面面积的提取结果,传统方法与点云断面提取结果差值的相对误差多数超过10%,而本研究方法提取结果的相对误差基本小于10%,优于传统方法。
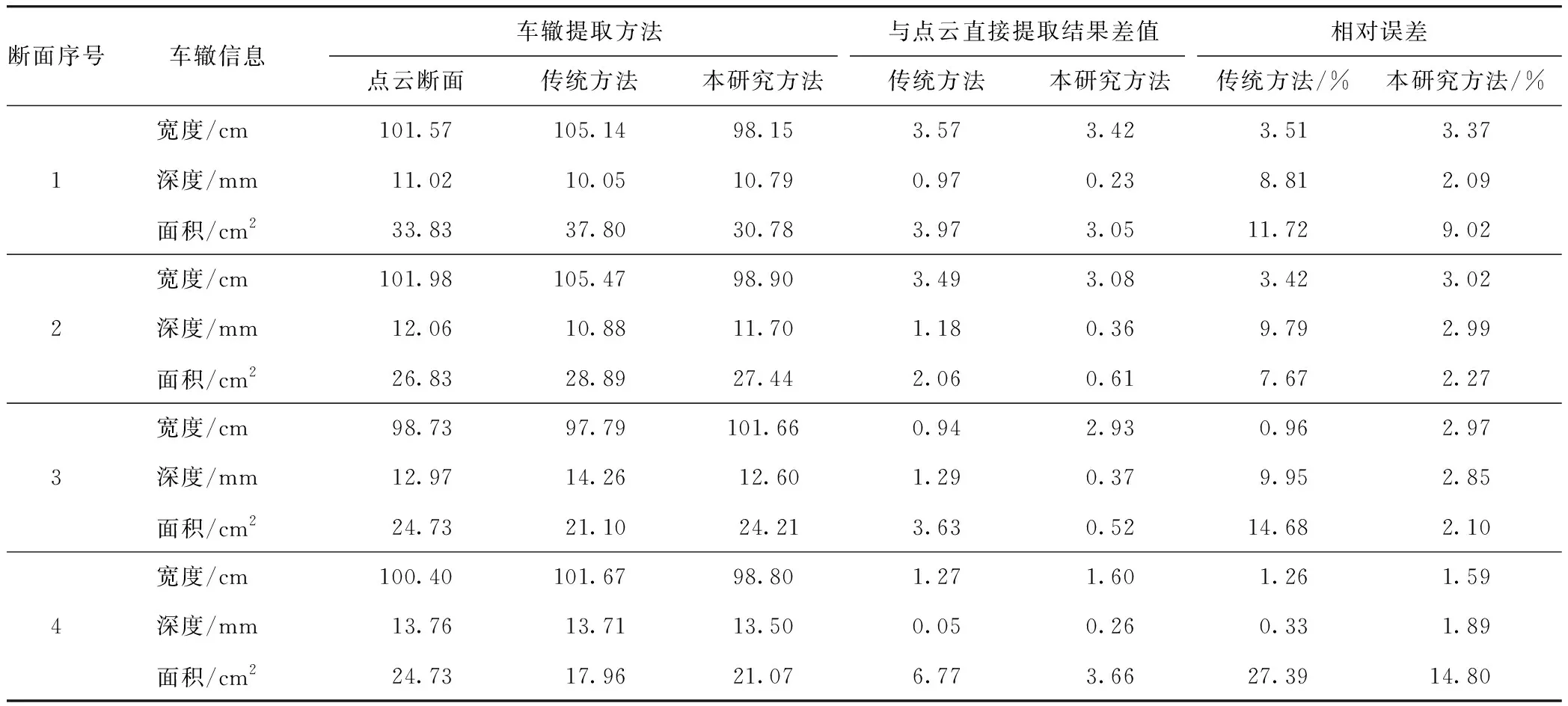
表2 不同方法的车辙提取结果对比Tab.2 Comparison of rutting extraction results obtained by different methods
3 结论
针对传统断面法提取车辙存在纵向分布信息缺失的问题,研究了一种基于多元点云特征图像的车辙精细三维特征提取方法。该方法充分挖掘了路面连续激光点云数据中车辙目标的空间分布特征信息,并将三维点云数据转化为二维特征图像进行处理,既降低了数据的复杂度,也综合运用了多种稳健的图像处理方法。最终利用提取的车辙平面轮廓线和横断面轮廓线共同表达车辙三维特征,为车辙病害的精细化检测提供了可行的方案。
