基于PC5/Uu模式的LTE-V2X测试*
2022-08-03华国栋李俊虎王众李宁梁军
华国栋 李俊虎,2 王众 李宁 梁军,2
(1.江苏智行未来汽车研究院有限公司,南京 211111;2.江苏大学汽车工程研究院,镇江 212013)
主题词:LTE-V2X 通信测试 车路协同 路侧单元 车载单元
LTE Long Term Evolution
V2X Vehicle to Everything
DSRC Dedicated Short Range Communication
MAC Medium Access Control
CAV Connected Autonomous
BSM Basic Safety Message
UE User Equipment
RSU Road Side Unit
OBU On-board Unit
GNSS Global Navigation Satellite System
PLR Packet Loss Rate
1 引言
目前,主流的V2X通信技术包括DSRC通信和CV2X通信。DSRC 由IEEE 标准和SAE 标准组成,在物理层和MAC 层采用802.11p 协议,C-V2X 通信主要包括LTE-V2X 和5G NR-V2X 两种通信技术,是从4G/5G 蜂窝通信技术发展而来的一种汽车无线通信技术,通过第三代合作项目(3GPP)不断发展和完善。C-V2X 基于蜂窝网络,具有部署成本低、网络覆盖广的优点,与DSRC相比具有比较明显的优势,是国内V2X技术标准的首选。
V2X通信用于车路协同功能,为驾驶员提供交通状态信息和危险预警信息,因此对于V2X 通信及时性、准确性提出了较高要求,随着LTE-V2X相关标准的制定,以及基于LTE-V2X 通信的路侧单元和车载单元产品的发展,现在亟需进行基于设备的实车测试,对相关产品和标准进行测试和验证,促进相关标准制定,加快产业化。
目前已经有一些科研工作者针对LTE-V2X 展开测试,Fan等提出了LTE-V2X 的测试方法和具体内容,并全面评估了LTE-V2X 的通信属性;Shi等通过实车测试对比DSRC和LTE-V2X的应用性能,通过构建概率模型,评估交叉口碰撞预警应用;Kawasaki等设计了碰撞预警功能测试,对比分析了基于PC5和Uu的LTE-V2X 在碰撞预警中应用的性能;Zhang等在长安大学的CAV测试场地构建了多个典型测试场景,以测试DSRC 和LTE-V2X 在实际道路环境中的通信性能。
本文主要针对路侧单元和车载单元相关产品进行测试,主要包括2方面测试内容:
(1)功能性测试,根据设计的车路协同路侧端功能,进行场地和设备部署,实现每个功能所需要的测试场景,并对功能能否有效实现进行测试;
(2)通信性能测试,主要测试设备的通信延时和丢包率是否满足功能需求。
2 测试内容
基于V2X通信的实车测试通常包括功能测试、通信性能测试和协议一致性测试等,本文进行了功能测试和通信性能测试。LTE-V2X包含2种工作模式,即短程分布式直连通信(PC5模式)和广域集中式蜂窝通信(Uu 模式)。基于PC5 模式的LTE-V2X 通信采用侧链路(Sidelink),即设备间直连通信,车辆直接广播自车基础安全信息(Basic Safety Message,BSM),自车也接收来自其它车辆的BSM;基于Uu 模式的LTEV2X 通信采用上行链路(Uplink)和下行链路(Down⁃link),Uplink 是指用户设备(User Equipment,UE)到eNB(eNodeB,基站),Downlink是指eNB到UE,即用户通过上行链路向基站单播传输信息,基站通过下行链路向用户广播信息。
2.1 功能测试
功能测试用于检测设备是否能实现设计的功能,评价功能的有效性。根据车路协同路侧端所实现的功能,将其分为2大类型,分别为交通诱导类功能和道路感知类功能,具体包含功能如表1所示。
表1 功能测试测试内容
其中,交通诱导类功能是指通过车联网数据平台将相应道路信息传至相应路段路侧RSU(其中,信号灯信息推送和闯红灯预警功能是通过信号机直传至路侧RSU),RSU再以一定频率向外广播,在服务范围内的网联车辆车载终端接收到推送的信息,用以提醒和诱导驾驶员驾驶行为,提高道路通行效率的功能;道路感知类功能则是指通过路侧的感知设备感知车辆、行人和其他交通参与者,并将感知数据传至RSU,RSU再以一定频率向外广播,在服务范围内的网联车辆车载终端接收到推送的信息,用以提醒驾驶员其他交通参与者状态信息,提高道路通行安全的功能。通过设计和部署相应场景,检测在场景中车载端是否能够有效地接收到推送的信息,来判断设备实现功能的有效性。
2.2 通信性能测试
通信性能测试用于检测在不同的车速、距离、道路条件下,设备的通信性能,包括延时、丢包率、覆盖范围指标,确定通信性能是否满足V2X功能要求。
3 测试方法
3.1 测试设备和场地
本文进行的实车测试分别在苏州某车辆测试场地A、苏州某车辆测试场地B、苏州相城区相城大道和青龙港路开放道路进行。在苏州车辆测试场地A 对某厂家X 的网联设备进行了功能性测试和PC5 模式的通信性能测试;在苏州车辆测试场地B对厂家Y的网联设备进行了功能性测试;在苏州市相城区开放道路进行了Uu模式的通信性能测试。苏州车辆测试场地A 如图1 所示。苏州车辆测试场地B 如图2 和图3所示。所有测试项目均选择在晴天进行,避免恶劣天气对测试结果的影响。
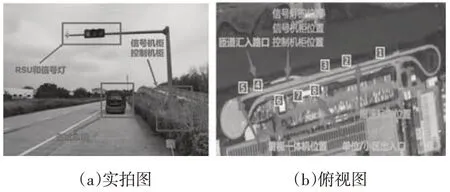
图1 苏州车辆测试场地A
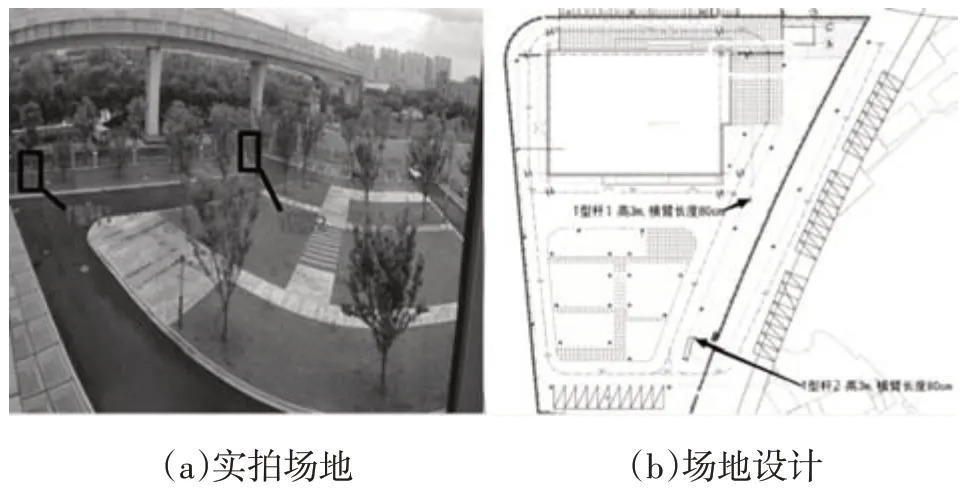
图2 苏州车辆测试场地B
图3 苏州车辆测试场地B的测试车辆
苏州车辆测试场地A测试中使用的RSU、OBU是厂家X 的产品,使用的雷视一体机是厂家Y 的产品,使用的激光雷达是厂家Z 的128 线混合固态激光雷达,使用的信号控制机是厂家X的产品,参数如表2~6所示,设备安装位置见图1所示,其中信号灯与交通信号控制机通过有线连接的方式通信,路侧RSU通过有线连接的方式获取交通信号控制机的数据。路侧感知设备包括激光雷达、雷视一体机均通过有线连接的方式与路侧RSU 进行通信,车载OBU 与路侧RSU 通过LTE-V2X 进行通信,移动设备终端与车载OBU 通过蓝牙进行数据交换。
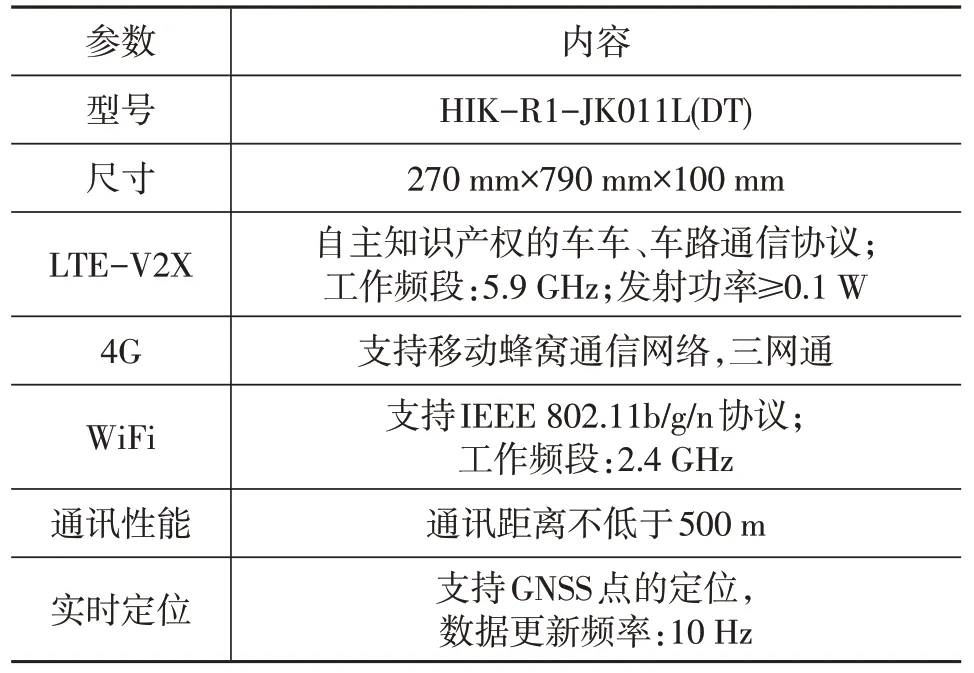
表2 厂家X路侧终端参数
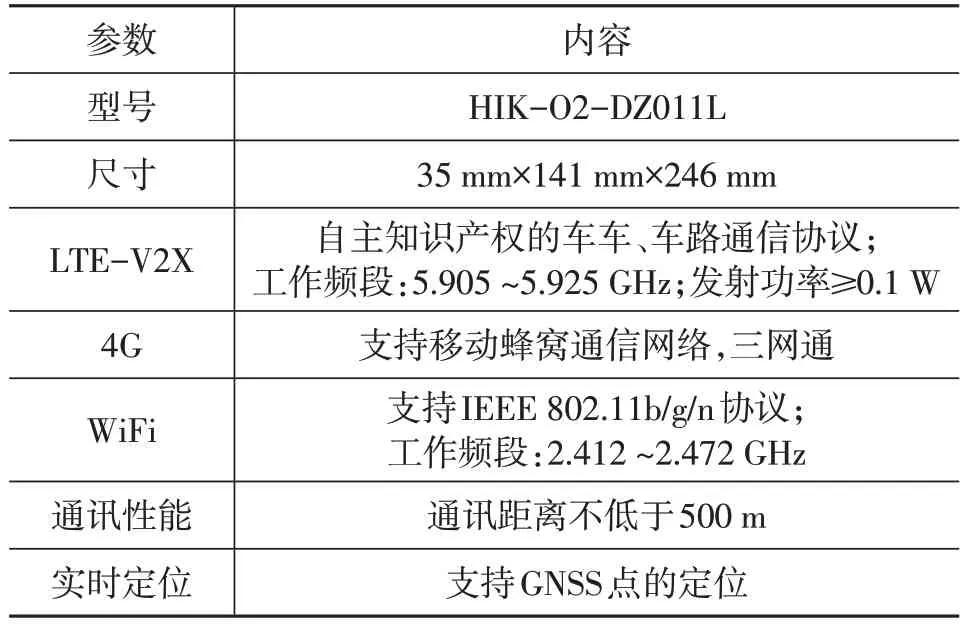
表3 厂家X车载终端参数
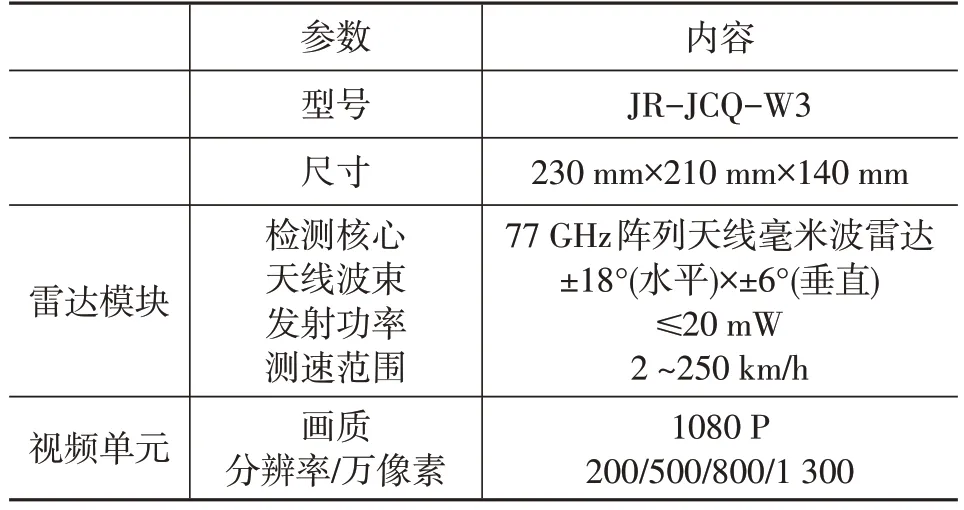
表4 厂家Y可视化雷达检测器参数
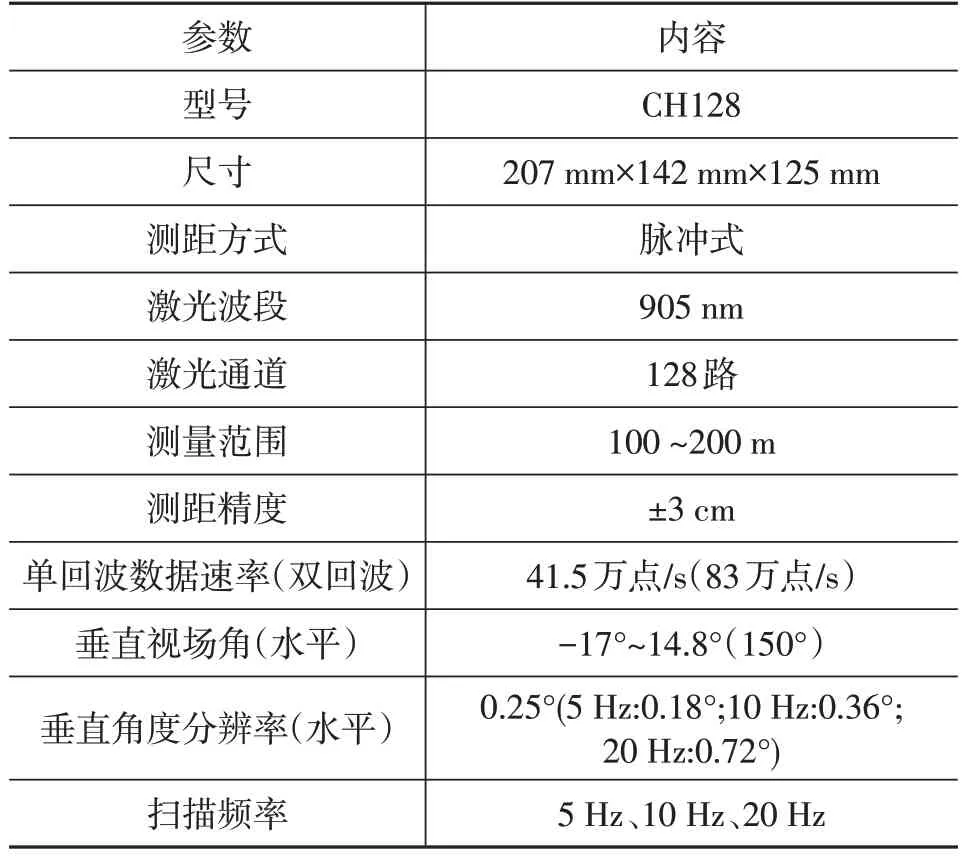
表5 厂家Z激光雷达参数
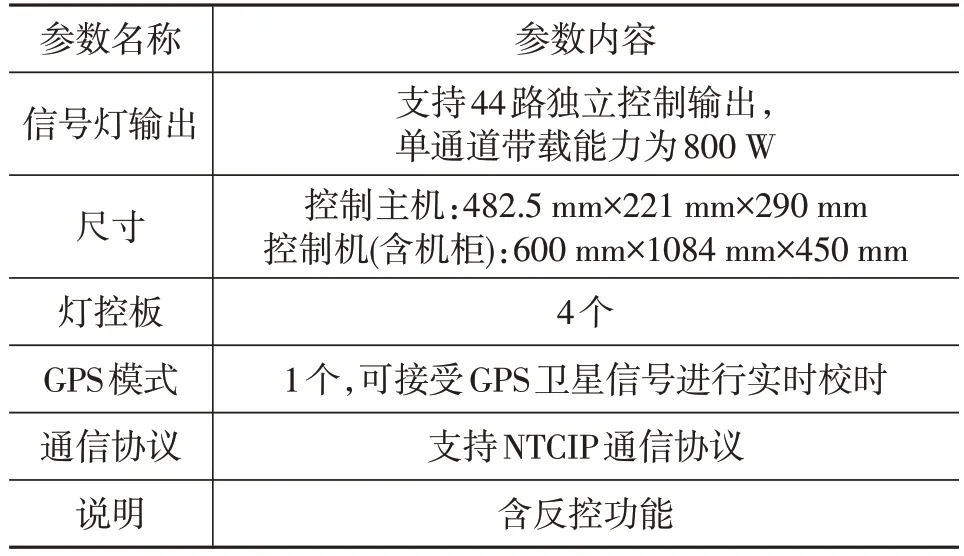
表6 厂家X信号控制机参数
苏州车辆测试场地B测试中使用的RSU、OBU、雷视一体机是厂家Y 的产品,参数如表4、7、8 所示,RSU、OBU和雷视一体机均安装在T型杆1上,安装方向为在图2设计图中朝向西安装,T型杆2上安装了一个摄像头,安装方向为在图2设计图中与东北方向的车道平行。测试网联车辆及其内部设备如图3所示。其中信号灯与交通信号控制机通过有线连接的方式通信,路侧RSU通过有线连接的方式获取交通信号控制机的数据。路侧感知设备包括激光雷达、雷视一体机均通过有线连接的方式与路侧RSU进行通信,车载OBU 与路侧RSU 通过LTE-V2X 进行通信,移动设备终端与车载OBU通过蓝牙进行数据交换。
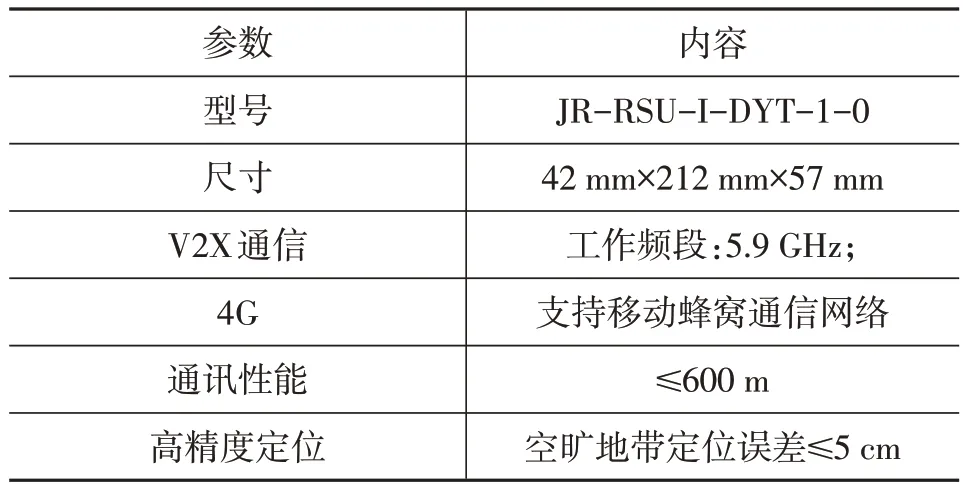
表7 厂家Y路侧终端参数
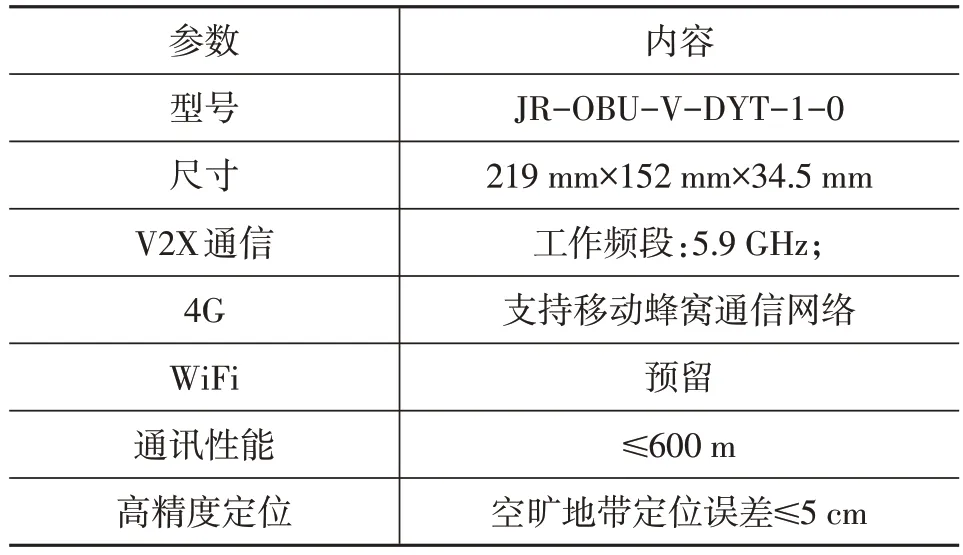
表8 厂家Y车载终端参数
3.2 功能测试
在苏州车辆测试场地A,针对厂家X 的设备进行了交通诱导类功能和道路感知类功能的测试,如图1所示。测试车辆从1 号位置出发,依次通过2~8 号站点,测试车辆到达2 号站点前触发信号灯信息推送和道路动态限速信息提醒,提示驾驶员信号灯状态、信号相位剩余时间及道路限速信息,车载单元根据自身车速判断当前是否超速,给予驾驶员提醒。在第一圈、第二圈、第三圈、第四圈和第五圈到达3号站点后,分别触发闯红灯预警、进行信号灯反控测试、触发道路分时禁行信息提醒、触发可变车道信息提醒、触发潮汐车道信息提醒。在第一圈、第二圈、第三圈到达4号站点前分别触发交叉口碰撞预警、匝道车辆汇入预警、道路交通管制信息提醒。当交叉口碰撞预警、匝道车辆汇入预警触发时,路侧感知单元将车辆、行人感知数据传至RSU,测试车辆接收到RSU 数据,发出预警信息。在到达6号站点前触发弱势交通参与者碰撞预警,提醒驾驶员注意弱势交通参与者,避免发生碰撞。在第一圈、第二圈、第三圈到达7号站点前分别触发前方道路施工信息提醒、前方道路拥堵提醒、交通事故信息推送。在第一圈、第二圈、第三圈到达8号站点前触发小区/单位出入口碰撞预警、触发紧急车辆信息发布和停车场信息发布。车载OBU 接收到数据后,通过蓝牙发送到移动设备,图4所示为测试过程中部分场景移动设备显示的预警信息,左侧圆圈内为预警内容图例,中间圆圈为当前车速,右侧红色圆圈为红灯剩余时间或距离预警地点距离。

图4 移动设备显示信息
在苏州车辆测试场地B,针对厂家Y的设备进行了交通诱导类功能和道路感知类功能的测试。如图2所示,测试车辆绕场地行驶,每圈到达T型杆1所朝向的车道时触发功能。图5所示为信号灯信息推送和闯红灯预警测试过程中设备显示信号灯信息示例,在测试车辆接近路口时,设备正常接收到信号灯推送信息,且信号灯转变为红灯时,能发出禁止通行警告。图5中右上角数字分别代表绿灯时长、红灯时长和车速信息。

图5 设备显示信息
测试过程中,每个功能均以不同的行驶速度(20 km/h、40 km/h、60 km/h、80 km/h、100 km/h)测试10 次,每次记录测试时间、地点、天气、测试设备型号,测试车辆预警时车速、预警距离参数和是否正确预警。
经过测试,所设计的功能均能有效地为驾驶员提供预警信息,并且测试车辆能够正常接收到路侧单元推送信息,发出正确地预警。测试过程中,预警距离在0~300 m之间。
3.3 通信性能测试
3.3.1 PC5模式通信性能测试
在苏州车辆测试场地A,选择信号灯信息推送场景进行PC5 模式通信性能测试,测试项目包括通信延时、丢包率2项。对测试车辆分别进行静态条件下和动态条件下通信延时和丢包率的测试。其中,静态条件下,以距离为变量,50 m为间隔,分别测试距离RSU水平距离10~510 m时测试车辆静止状态下的通信延时和丢包率;动态条件下,测试车辆从距离RSU水平距离为0 的位置出发,分别以20 km/h、40 km/h、60 km/h 的速度进行3组测试,以距离为变量,50 m为间隔,分别测试距离RSU水平距离10~510 m时的通信延时和丢包率(Packet Loss Rate,PLR)。测试过程中,在测试车辆和RSU 之间没有干扰车辆、行人和遮挡物。其中,路侧RSU 与车载OBU 采用GNSS 时钟同步。通信延时为数据包接收时间与数据包发送时间之差,丢包率PLR=(P-P)/P,其中P为发送的数据包数,P为接收的数据包数。
3.3.2 Uu模式通信性能测试
同样采用信号灯推送场景进行测试,测试在苏州市相城区开放道路上,基于Uu 模式的通信延时和丢包率。对测试车辆分别进行静态条件下和动态条件下通信延时和丢包率的测试,其中,静态条件下,以距离为变量,50 m 为间隔,分别测试距离eNB 水平距离10~510 m 时测试车辆静止状态下的通信延时和丢包率;动态条件下,测试车辆从距离eNB水平距离为0的位置出发,分别以20 km/h、40 km/h 和60 km/h 的速度进行3组测试,以距离为变量,50 m为间隔,分别测试距离eNB 水平距离10~510 m 时的通信延时和丢包率。测试过程中,在测试车辆和RSU之间没有干扰车辆、行人和遮挡物。
进行以上测试并记录通信延时和丢包率数据,结果如表9~11所示。
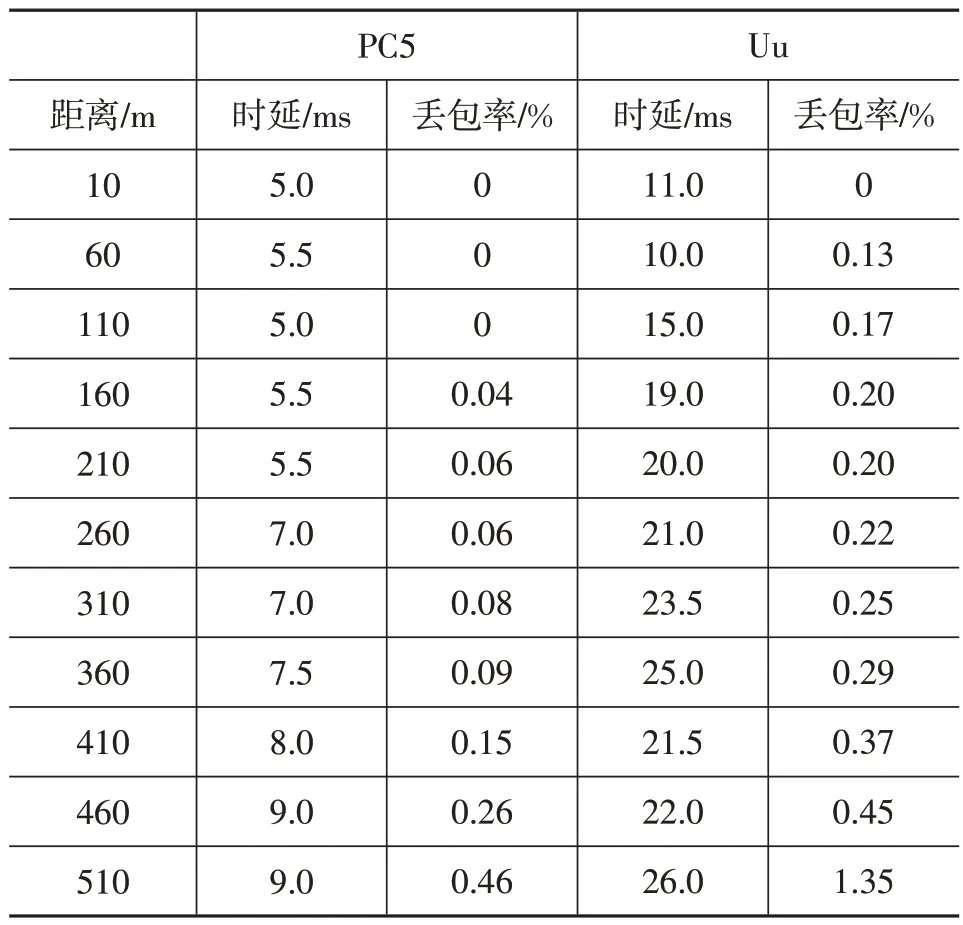
表9 在20 km/h速度下通信延时和丢包率
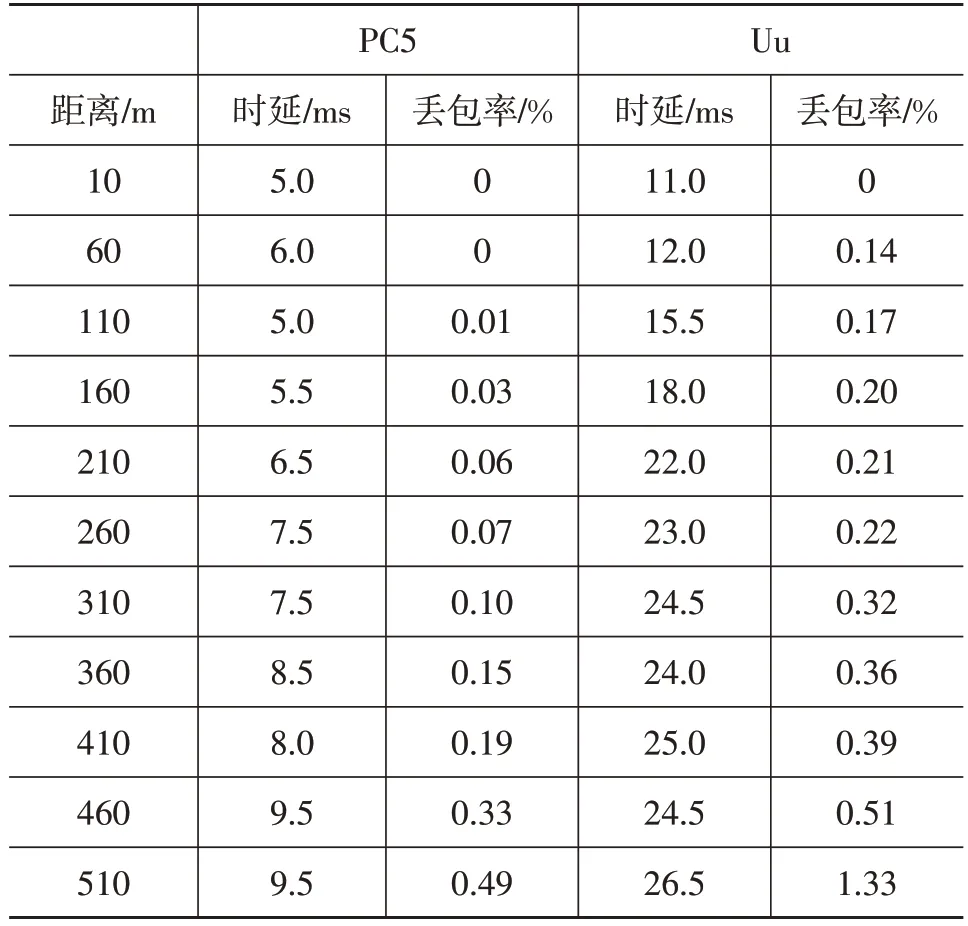
表10 在40 km/h速度下通信延时和丢包率
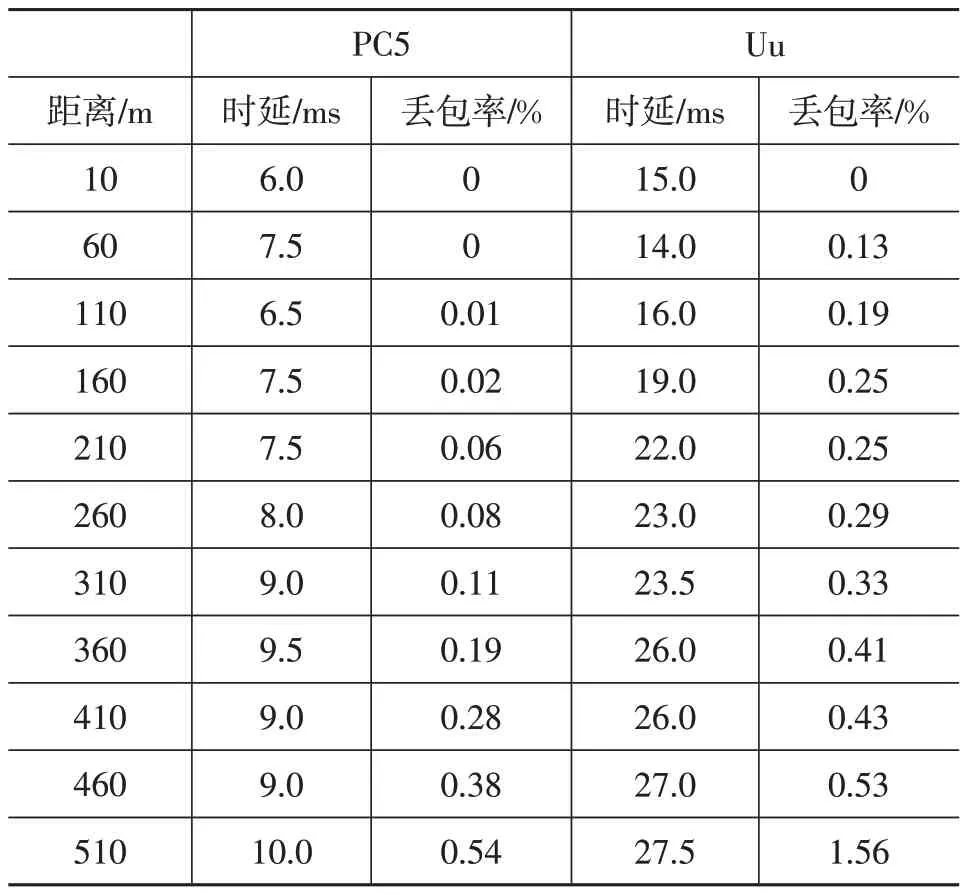
表11 在60 km/h速度下通信延时和丢包率
4 结果分析
对于功能测试,在不同的测试速度和预警距离下,车辆都能正常接收到预警信息,驾驶员能够根据不同的预警功能,及时做出决策。
对于通信性能测试,随着测试距离的增加或测试车辆速度的增加,通信延时均会略微增加,但影响并不显著。两种通信方式丢包率均比较小,随着测试距离的增加或测试车辆速度的增加,丢包率也会增加,但丢包率受速度影响较小,当距离增加到一定值时,丢包率受距离影响较大,丢包率会出现一定幅度的增加。因此在500~600 m 之间进行了多组测试,得到PC5 和Uu 模式丢包率数据最大值分别为0.69%和2.33%,PC5模式丢包率满足功能需求,而Uu模式的丢包率稍大;针对通信延时,经测试两种通信方式的有效通信范围约为600 m,在600 m以内2种通信方式的平均通信延时分别为7 ms 和16 ms,随着车辆行驶速度的增加,通信延时也有所增加,但变化幅度不大,PC5模式通信延时满足各功能需求,而Uu模式的通信延时稍大。因此在有效的通信范围内,保持正常车速行驶,PC5模式的丢包率和通信延时可以满足功能的需要,而Uu模式则不能单独满足功能的需要,只能与PC5模式同时使用以增大通信数据的准确性。
对比2 种通信方式可以发现,在同样的速度和距离条件下,PC5模式相较于Uu模式有较低的通信延时和丢包率,这有可能是由于基于Uu 模式的通信方式需要将数据经过eNB 进行中转,因此相较于基于PC5模式的直连通信方式,基于Uu 模式的通信方式通信延时和丢包率都会较高。但在实际应用测试中,基于PC5的直连通信面临的干扰非常大,比如道路上复杂的交通环境造成的遮挡干扰、金属材料干扰、建筑物干扰等,会极大影响PC5方式下通信的准确性和及时性。因此,对基于PC5模式的直连通信应用具有较大挑战。
5 结论
目前,在测试场景中,基于PC5和Uu的LTE-V2X的性能可以满足车路协同路侧端功能的需要,能够实现相应功能的预警作用,但由于真实道路状况复杂,存在很多干扰,而且PC5和Uu模式各有优缺点,因此还不能广泛应用在真实的复杂路况中。同时由于5G V2X 更高可靠性、更低延时以及更好的兼容性,CV2X 正在从LTE-V2X 向5G NR-V2X 演进,对LTEV2X 进行测试,能够推动相关标准建立和5G V2X 的发展,加速产业化进度。
由于设备和人员的局限,只通过V2I 对车路协同路侧端功能场景进行了多组测试,并将通信延时和丢包率作为通信性能的评价指标,在未来的测试中,希望可以在真实路况中,通过V2X包含的各种方式进行测试,并选择多种评价指标进行综合评价,能够更加合理地部署网联设备,增强网络通信性能。并希望在以后的研究中能够补充其他厂家芯片和设备,对本文测试结果进行复验,提高结论的普适度。
