舰炮末敏弹对水面无人艇单目标射击效能仿真分析*
2022-08-02崔东华孙世岩
曹 鑫 周 源 崔东华 孙世岩
(1.海军工程大学兵器工程学院 武汉 430033)(2.海军研究院 北京 100161)
1 引言
水面无人艇(USV)是一种具有一定自主能力,可在不搭载操作人员情况下自主航行并完成一定作战或作业任务的水上平台[1~2]。在现代海战中,无人艇装备通常充当着先锋军或者侦察兵的角色,是海军战斗力的“倍增器”[3~5]。它具有个体目标小、机动性能高和装备成本低等特点,因此,在现代海战中如何解决水面无人艇对舰艇带来的威胁,是目前各国海军亟需解决的问题[6~10]。基于此背景,“舰炮+末敏弹”方案被提出,舰炮末敏弹是一种由舰炮武器系统发射,能够在末敏弹弹道末端对海面目标自动探测、捕获、识别和命中的智能化弹药[11]。
舰炮末敏弹在实际作战过程中能否成功击中来袭无人艇目标存在多个影响因素,主要有探测系统精度、打击方案合理性、发射误差和末敏子弹性能,即末敏子弹是否具备对目标的捕获、识别、命中的能力[12~15]。由此可知,决定末敏弹能否准确击中无人艇目标的因素是复杂的,研究分析作战全过程的所有因素对末敏弹射击效能的影响非常困难。仅考虑末敏弹本身,可以发现末敏子弹稳态扫描阶段前,武器系统的所有作用是为将末敏子弹准确送至目标区域上空,只有末敏子弹成功飞行至目标区域上空进行稳态扫描(假设扫描区域内存在目标),末敏子弹才存在命中目标的可能性,基于此,可以将全过程分为两段:稳态扫描前作用过程和稳态扫描段。
为了更好地研究舰炮末敏弹自身性能参数对无人艇目标命中概率的影响,本文主要考虑稳态扫描段,研究末敏子弹对其理论扫描区域内各无人艇单一目标的命中概率,采用仿真模拟法研究分析落速、转速、稳态扫描角、敏感器定位精度、EFP散布、环境风速、末敏子弹弹着点散布等因素对无人艇单目标命中概率的影响。
2 仿真模型构建
2.1 坐标系定义
1)大地坐标系O-xyz( E)
此坐标系记为( )E ,其原点O 为末敏子弹理论扫描区域中心点,即不考虑子弹实际起始扫描点(实际弹着点)与理论起始扫描点(理论弹着点)之间的偏差,Ox 轴在水平面内与末敏弹射向一致,Oy 铅直向上,Oz 在水平面内按右手法则确定。该坐标系用于生成无人艇目标及末敏子弹实际扫描中心位置,并确定两者的相对关系。
2)扫描坐标系Osj-XsjYsjZsj( )S
将大地坐标系原点平移至末敏子弹实际起始扫描中心在Oxz 平面上的投影点osj( )xsj,0,zsj处,坐标轴方向不变,得到每枚子弹的扫描坐标系。其中j=1,2,3…表示第j 枚子弹。该坐标系用于描述每枚子弹的扫描运动规律。
2.2 稳态扫描模型
稳态扫描阶段的伞-弹系统对地面目标的探测、搜索和识别过程可简化为如图1 所示的末敏子弹对地面的稳态示意图。图中,H 为末敏子弹起始扫描高度,L 为敏感器作用距离,V 为子弹落速,ω 为扫描角速度(末敏子弹绕铅锤轴旋转角速度),θ 为末敏子弹扫描角,即子弹纵轴与铅锤轴之间的夹角,Δ 为螺距。
任意时刻扫描轨迹点坐标可表示为式(1):


图1 末敏子弹稳态扫描示意图
敏感轴扫描轨迹扫过目标区域的距离大于判宽lk时通常认为即捕获目标;捕获目标后进行识别判断,抽取随机数μ ,与末敏子弹识别概率p 比较,大于p 时即认为目标识别成功;识别成功后将扫描轨迹进入目标区域中点位置设为理想瞄准点[16],在敏感器定位精度影响下,实际瞄准点与理论瞄准点存在偏差,EFP 散布主要造成实际命中点与实际瞄准点之间的偏差,根据两个误差的分布特性及误差水平,代入计算模型生成实际命中点,判断目标命中情况。
2.3 无人艇目标模型
以美国“海军水面无人艇主计划”中确定的X级、港口级、通气管级、舰队级等4 级不同尺度的无人艇平台为打击对象,其对应几何尺寸分别设定为3m×1.5m 、7m×1.9m 、9m×2.1m 、11m×3.5m ,仿真计算时,在末敏子弹理论扫描区域内随机生成目标中心点,根据打击目标选取种类的不同,分别围绕目标中点生成不同几何尺寸的目标区域。
3 射击效能计算及参数影响分析
3.1 仿真条件设定
舰炮末敏弹自发射后,沿预定的飞行轨迹往打击区域中心点上空飞行,根据打击方案的制定原则,末敏弹携带的每枚末敏子弹存在理想打击区域,该区域是以末敏子弹理想弹着点为中心、以其最大扫描距离为半径的圆形区域,假设末敏子弹的理想打击区域内存在一无人艇目标,目标几何中心随机分布在大地坐标系下的末敏子弹理想打击区域内,目标中心点分布如图2所示。
由于末敏弹实际飞行过程中受各种误差因素影响,末敏子弹实际弹着点与理想弹着点存在偏差[18~19],假设末敏子弹实际弹着点相对理想弹着点的散布在x、z轴方向上都服从正态分布。考虑子弹散布仿真计算时,在大地坐标下理论扫描区域内随机生成目标几何中心位置坐标,同时根据末敏子弹实际弹着点分布特性随机生成末敏子弹实际弹着点坐标,将目标几何中心与末敏子弹实际弹着点之间的相对位置转入扫描坐标系内,扫描坐标系原点为末敏子弹实际初始稳态扫描运动中心点,基于稳态扫描模型,在扫描坐标系内求解末敏子弹对无人艇单目标的命中概率。考虑子弹弹着偏差时目标中心相对弹着点的分布如图3所示。
图2 大地坐标系下目标随机分布示意图

图3 扫描坐标系下目标随机分布示意图
3.2 仿真流程
基于蒙特卡洛法对末敏子弹理论扫描区域内单目标的命中概率进行计算,具体计算流程如图4所示。
3.3 射击效能计算
各参数设定如下:初始扫描高度h=120m,扫描平台转速ω=4r/s ,落速v=12m/s ,扫描角θ=30° ;弹着点误差服从正态分布,误差水平为Ex=90m、Ez=27m ;敏感器定位误差服从正态分布,误差水平为Ex=Ez=0.5m;EFP 散布误差服从正态分布,误差水平为Ex=Ez=0.3m;目标捕获后识别概率P识别|捕获=0.9,受恒风Vf=5m/s 影响[20]。仿真步长0.0005s,仿真次数1000次,识别判宽分别为不同目标宽度的一半,采用一次捕获准则,将以上参数代入仿真程序,计算所得捕获概率、命中概率结果如表1所示。

图4 仿真流程图
表1 不同目标捕获、命中概率表
由结果可知,基于当前末敏子弹性能参数水平,考虑环境风速和末敏子弹落点偏差的影响,舰炮发射末敏弹后,末敏子弹对其打击区域内静止状态下、随机位置处各型无人艇单目标都具有超过56%的捕获概率和43%的命中概率,且随着无人艇目标尺寸的增大,末敏子弹捕获和命中目标的概率相应增大。
3.4 参数影响分析
进行参数分析时,为了更好地研究各因素的影响效果及程度,除研究末敏子弹弹着点偏差、风速自身因素对命中概率的影响外,对其他参数的分析不考虑弹着点偏差和风速,即无风条件下在大地坐标系进行命中概率的仿真计算。下列图中X、G、T、J 所代表的分别为X 级、港口级、通气管级、舰队级无人艇目标命中概率在不同因素影响下的命中概率变化情况。
图5 扫描平台参数变化对命中概率的影响
1)扫描平台参数的影响
由结果可知,对通气管级、港口级、舰队级无人艇目标,落速、转速、扫描角在上述数值范围内变化,末敏子弹对其命中概率基本保持不变;对X 级无人艇目标,落速、转速和扫描角的任一因素的变化都会对命中概率产生比较明显的影响,其中,落速 由8m∕s 变 化 至16m∕s 时,命 中 概 率 下 降 了 约15%,转速由2r∕s 变化至5r∕s 时,命中概率增加约27.5%,继续增加转速对命中概率影响较小,稳态扫描角由20°变化至40°时,命中概率下降约16%。
2)敏感器定位精度、EFP散布的影响
敏感器定位误差与EFP 散布误差对命中概率的影响类似,假设两者都服从正态分布,敏感器定位误差期望中值Ex变化范围设为0~2m,EFP散布期望中值E′x 变化范围设为0~1.5m ,改变单一因素的取值对无人艇目标命中概率的变化情况如图6、图7所示。
图6 敏感器定位精度对命中概率的影响
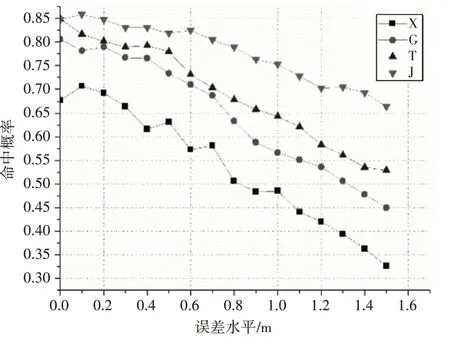
图7 EFP散布误差对命中概率的影响
由结果可知,两种误差因素误差水平的变化对各型无人艇目标的命中概率都有比较明显的影响。对通气管级、港口级、舰队级无人艇目标Ex≤0.25m 、E′x ≤0.5m 时,命中概率基本保持不变,后续误差水平提升会造成命中概率下降;对X级无人艇目标Ex≤0.1m 、E′x≤0.2m 时,命中概率基本保持不变,后续误差水平提升会造成命中概率下降。
3)环境风速的影响
环境风速主要影响伞-弹系统的稳定状态,稳态扫描角的大小发生动态变化,同时在环境风速的影响下,伞-弹系统随海风方向运动,使稳态扫描中心发生偏移,从而改变稳态扫描轨迹,部分区域扫描轨迹密集,部分区域扫描轨迹线螺距增大,最终对其扫描区域内目标的捕获、命中概率影响由螺距增大区域、螺距减小区域的目标的命中概率变化情况共同决定。
其他参数保持不变,环境风速使目标在任意方向的横向绝对速度处于0~30m∕s 区间,计算末敏子弹对不同无人艇目标的命中概率,结果如图8 所示。
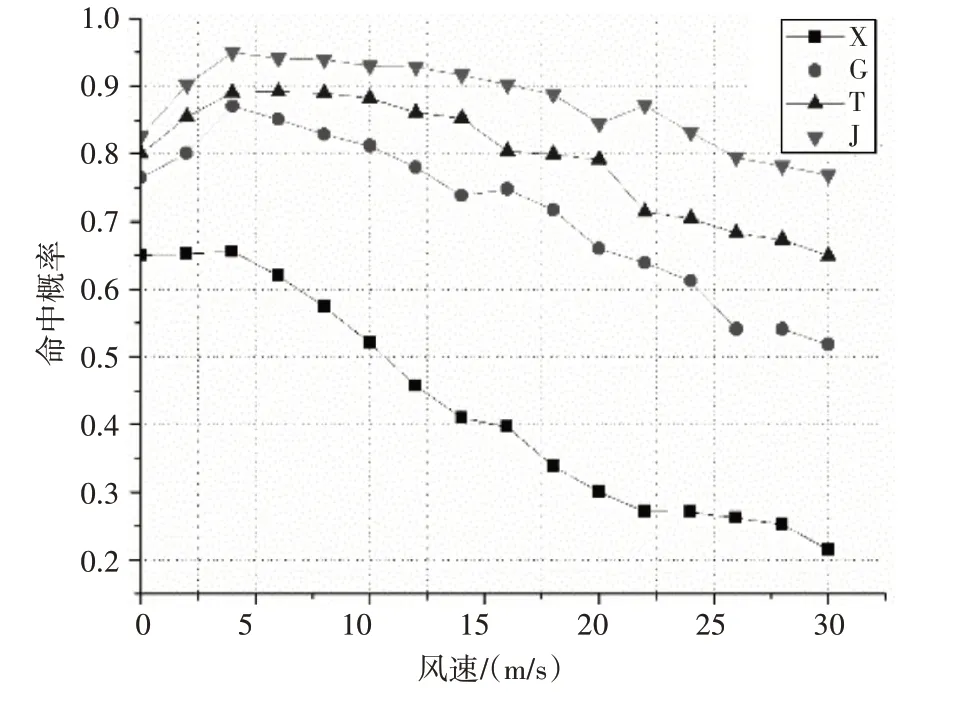
图8 风速变化对命中概率的影响

图9 子弹弹着偏差对命中概率的影响
由结果可知,环境风速使伞-弹系统横向绝对速度在0~3.75m/s 之间时,X 级无人艇目标命中概率基本保持不变,之后逐渐递减;速度在0~3.75m/s时,对舰队级、港口级、通气管级无人艇目标的命中概率增大,速度大于3.75m/s 后,命中概率逐渐减小。
4)末敏子弹弹着点散布误差的影响
敏子弹弹着点的散布主要影响对目标的捕获概率,进而影响命中概率。根据理论分析及实际情况,假设实际弹着点位置相对理想弹着点在x 轴、z 轴方向上分别服从两个不同大小的期望中值的正态分布,则目标中心点在扫描坐标系下的分布如图3 所示,部分目标中心点出现在子弹理论扫描区域范围外,该部分目标不存在捕获、命中情况,因此,整体降低了末敏子弹对理论扫描区域内出现的目标的捕获概率,从而引起命中概率下降。其他参数保持不变,x 轴方向弹着散布期望中值Ex分布在0~135m 区间,z 轴方向弹着散布期望中值Ez分布在0~40.5m 区间,计算末敏子弹对不同无人艇目标的命中概率,结果如图9所示。
由结果可知,存在末敏子弹弹着点误差时,对各型无人艇命中概率都下降,其中,射向方向上弹着散布期望中值Ex不大于20m(此时Ez为6.75m)时对子弹的命中概率影响较小,大于该值时捕获概率、命中概率下降明显。
4 结语
笔者针对舰炮末敏弹打击水面无人艇单目标的射击效能分析问题,基于传统舰炮作用流程、末敏弹现有性能参数水平和相关误差的分布特性及分布水平,仿真计算得到末敏子弹对其理论扫描区域内随机存在的4 型无人艇水面艇平台的单目标捕获概率为56.4%~60.6%、命中概率为43.5%~58.1%;分别研究了落速、转速、稳态扫描角、敏感器定位精度、EFP 散布、环境风速、末敏子弹弹着点散布等因素单一因素改变对无人艇单目标命中概率的影响,通过仿真程序进行大量计算,并对各单一因素改变引起的命中概率变化结果、变化原因、变化规律进行了分析,可以为舰炮末敏弹的论证、研制及其性能水平的设计提供一定的参考。
