基于PLC 的环卫垃圾车上料机械手液压控制系统的设计*
2022-08-03王守城易炳辉
张 鑫 王守城 易炳辉
(青岛科技大学机电工程学院 青岛 266061)
1 引言
随着各种生活垃圾的增多,环卫垃圾车作为一种垃圾集中收集处理的专用车辆,被广泛应用在城市、街道、乡村的环卫工作中。环卫垃圾车需要通过上料机构,将放置在垃圾桶中的各种垃圾收集到车载垃圾储存箱中,直接进行垃圾压缩或运回垃圾处理站进行处理。对现有的上料机构进行改进,设计一种机电液一体化的机械手,整体安装在环卫垃圾车上,采用PLC作为控制器,以液压为驱动方式,包括推出机构、抓取机构、提升翻转机构、开合箱盖机构,更方便、更高效地实现垃圾的收集入车。
2 环卫垃圾车上料机械手整体结构及工作原理
上料机械手搭载在环卫垃圾车上,由推出机构、抓取机构、提升翻转机构、开合箱盖机构组成,共同完成垃圾桶垃圾的收集。
推出动作由安装在滑轨支架后方的液压缸驱动,滑轨支架上端两侧安装有滚轮,使其能够沿着车身上的轨道上下滑动。液压缸活塞伸出,使滑轨支架推出,同时带动滑轨支架沿着轨道下移,实现滑轨支架的前伸,更加接近垃圾桶的位置,便于下一步的抓取动作。轨道和液压缸共同承载滑轨支架,稳定支撑,动作更加平稳。
抓取机构构成的部分有基座、驱动液压缸、抓取手爪,抓取手爪有两只,安装的位置是在基座上,抓取手爪内表面装有摩擦垫片,以增大摩擦力,并且防止抓取手爪过度磨损垃圾桶。当需要抓取垃圾桶时,液压缸驱动两侧的抓取手爪转动,合并在一起,完成抓取垃圾桶的动作。
提升翻转机构包括滑轨支架、传动链条、液压马达等构成,当抓取手爪完成抓取垃圾桶后,车厢盖也随之打开,为垃圾桶倾倒垃圾做好准备。液压马达开始转动,带动安装在滑轨支架上的链条传动,使基座能够沿着滑轨支架中间的轨道移动,使抓取手爪随链传动而上下移动。当基座和抓取手爪进入滑轨支架顶端的弧形轨道内,垃圾桶开始向内倾斜,通过行程开关来确定垃圾桶的倾斜角度,倾斜角度为150°~170°。当基座和机械手爪转过170°时,触发行程开关,液压马达卸荷停止转动,待垃圾桶内的垃圾全部倾倒入车后,液压马达开始反向转动,带动基座和抓取手爪向下移动,将垃圾桶送回地面。
开合箱盖机构包括箱盖、滑板、举升液压缸等,箱盖与滑板通过转轴相连,滑板底端两侧安装有滑轮。在抓取手爪完成抓取动作之后,举升液压缸将车箱盖向上提升,带动滑板沿着倒料斜切口处两侧的轨道向上滑行,倒料口被完全打开[1]。

图1 环卫垃圾车上料机械手动作流程图
具体动作流程图如图1 所示,驾驶员驾驶垃圾车,通过位移传感器检测车体与垃圾桶的距离,侧向接近垃圾桶的合适位置停下。推出液压缸启动,将滑轨支架向前推出,同时滑轨支架向下移动,抓取手爪将垃圾桶抓住,车箱盖打开,液压马达驱动链条转动,将抓取手爪提升、翻转,垃圾桶倾倒垃圾,倾倒完毕后,液压马达反转,将抓取手爪向下移动至垃圾桶底接触地面,机械手爪松开,车箱盖关闭,垃圾桶放回原地,推出缸缩回,将滑轨支架放回[2]。
2 环卫垃圾车上料机械手液压系统工作原理
上料机械手液压系统主要包括四个部分,分别为推出机构液压回路、抓取机构液压回路、开合箱盖机构液压回路、提升翻转机构液压回路,整部分液压系统由一套液压泵源供油,以液压作为动力传输,驱动各个机构的运动,整体液压系统原理图如图2所示。

图2 环卫垃圾车上料机械手液压系统原理图
推出机构回路:推出机构负载平稳,在回路中串联节流阀,通过节流阀调节液压缸运动的速度。具体工作原理为:当1YA 得到电时,三位四通电磁换向阀6 左位接通,压力油从泵口流出,经过换向阀6 的左位、节流阀7,最后流入推出液压缸8 的无杆腔,有杆腔油压小于无杆腔油压,推出缸的活塞杆因此伸出,活塞运动速度可以由节流阀进行调节,推出液压缸将滑轨支架完全推出;然后1YA 失电,换向阀7 处于中位,滑轨支架始终处于被推出的状态;当垃圾倾倒完成,垃圾桶重新放回原地时,2YA 得电,换向阀右位接通,油液经过换向阀右位进入推出液压缸8 的有杆腔,活塞杆缩回,回油路中,油液经过节流阀流回油箱,滑轨支架平稳收回[3]。
提升翻转机构回路:以液压马达的旋转带动链条的转动,进而将抓取手爪提升,由于液压马达的功率较大,当系统停止供油时,在自身和负载的惯性作用下,仍然会继续转动,所以在回路中用制动器来对液压马达进行制动。具体工作原理为:抓取手爪完成抓取垃圾桶后,3YA 和5YA 同时得电,液压油经过二位二通换向阀5,一部分通过单向节流阀13 进入制动液压缸12,另一部分通过三位四通电磁换向阀左位、平衡阀10,进入液压马达11 左腔。因为制动回路是有节流阀,因此液压油将会先进入液压马达,这使得液压马达产生一定的转矩,从而防止负载带着马达转动,待制动液压缸压力大于弹簧调定压力后,再解除制动,液压马达启动、开始正转,将抓取手爪提升起来;当抓取手爪触翻转触发导轨终点行程开关时,3YA 和5YA 失电,三位四通电磁换向阀处于中位,制动液压缸油液马上流回油箱,弹簧复位,迅速使液压马达制动,延时数秒,待垃圾桶内垃圾完全倾倒后[4],4YA 和5YA 得电,液压油先经过三位四通电磁换向阀右位进入液压马达右腔,产生一定转矩后,制动液压缸顶开弹簧,解除制动,液压马达开始反转,将抓取手爪送回地面,进油压力大于回油压力,回油路上的顺序阀被打开,油液流回油箱;触发起点行程开关时,4YA和5YA 失电,制动液压缸迅速制动,液压马达停止转动。
“新政”是经济危机的结果,它对国民经济的干预扩大了政府的权力与责任,但覆盖范围仍不够广,它的受益者主要是中产阶级、农民和那些有组织的具有优势的城市工薪阶层中的白人,黑人、印第安人的遭遇仍然很悲惨,他们深受种族歧视、失业、贫困的折磨。
抓取机构回路:抓取手爪是两个液压缸一起驱动,因此液压缸的同步性需要考虑,在回路中增设分流集流阀,以此保证两个液压缸进出油的同步,活塞杆缩回的时候,发挥集流的作用,活塞杆伸出的时侯,发挥分流的作用,在负载不均的情况下,仍然可以时两个液压缸分的相同的流量。抓取手爪在抓取垃圾桶时保持抓紧状态,会存在压力降低导致夹紧力变小的情况,因此需要进行补油保压,采用液控单向阀与电接触式压力表的保压回路[5]。具体工作原理为:当导轨支架推出后,抓取手爪接近垃圾桶,7YA 得电,三位四通电磁换向阀14 右位接通,油液经过换向阀液控单向阀15、分流集流阀16,然后分别进入抓取液压缸18和19的无杆腔,活塞杆将会伸出,活塞杆伸出使得抓取手爪开始合并,完成抓取,当压力提升到电接触式压力表17 上限时,7YA 将会失电,三位四通电磁换向阀将会处于中位,液压泵会卸荷,系统保压,当压力下降到电接触式压力表17 下限时,7YA 再次得电,进行补油,压力回升。当垃圾桶重新放回后,6YA得电,三位四通电磁换向阀此时处于左位,液压油进入抓取液压缸有杆腔,回油路上的液控单向阀将被反向顶开,油液流回油箱[6]。
开合箱盖回路:在抓取手爪完成抓取的时,8YA 得电,三位四通电磁换向阀20 处于左位,油液经过节流阀21 进入开合液压缸22 的无杆腔[7],活塞杆伸出,箱盖被打开,然后8YA失电,换向阀处于中位,箱盖保持打开状态;当抓取手爪松开后,9YA得电,换向阀将处于右位,油液会进入液压缸有杆腔,活塞杆缩回,油液经过节流阀流回油箱[8],箱盖关闭。
根据各部分液压回路原理和各个机构的动作,可以得到环卫垃圾车上料机械手液压系统的电磁铁动作逻辑表,如表1 所示,“-”表示电磁铁失电,表中”+”表示电磁铁得电。

表1 电磁铁动作逻辑表
3 环卫垃圾车上料机械手控制系统设计
以PLC(可编程逻辑控制器)作为系统的控制单元,接收传感器的反馈信息,输出指令来控制液压泵驱动电机和电磁阀中的电磁铁的得电与失电,实现对液压系统油液的控制,进而实现各个机构的顺序动作[9]。在设计控制系统之前,需要明确被控的对象,分析各个动作的逻辑关系,根据总体设计需求,来选择PLC的基本单元和输入输出接口的分配,然后设计硬件的电气线路连接图,再编写具体的PLC 程序,并进行模拟和调试,直至结果满足设计要求。
3.1 控制系统动作流程
设计完整的垃圾车上料机械手的动作流程图,有助于后续的I∕O口的分配和软件程序的编写。垃圾车上料机械手的工作模式是顺序工作[10],在工作之前和工作完之后,上料机械手将都会处在原始位置,详细的动作流程如图3所示。

图3 整体动作流程图
1)各个机构均处于初始状态,等待操作信号发出;
3)推出缸伸出,滑轨支架被向前推出、并沿着导轨向下滑动,当到达限位开关1 时,停止,到达抓取的合适位置[11];
4)抓取缸伸出,抓取手爪开始合并,直至限位开关2,抓紧垃圾桶,停止,同时箱盖缸伸出,车箱盖被打开,当触碰到限位开关3时,停止;
5)液压马达开始正转,将抓取手爪提升起来至滑轨支架的上极限4,制动缸压下,开始制动,液压马达停止转动,定时器开始计时,5s 后,制动缸退回,液压马达反转,将抓取手爪下降,当触碰到滑轨支架的下极限5 时,垃圾桶到达地面,制动缸压下,液压马达停止转动[12];
6)抓取缸缩回,抓取手爪松开垃圾桶,当触碰限位开关6 时,停止,抓取手爪收回,同时箱盖缸缩回,箱盖下落,触碰到限位开关7 时,停止,箱盖完全关闭;
7)推出缸缩回,滑轨支架向后回动、并沿着导轨向上滑动,当触碰到限位开关8 时,停止,滑轨支架完全收回[13];
8)液压泵驱动电机停止。
3.2 PLC的地址分布和端子接线图
根据动作流程图的要求,选用西门子S7-200系列PLC,系统需要输入接口20 个[14],其中包括:电动机的启停、推出缸的伸出与缩回、抓取缸的伸出与缩回、液压马达的正反转、制动缸的压下与退回、箱盖缸的伸出与缩回;垃圾桶倾倒延时;滑轨支架推出和收回的限位、抓取手爪抓住和收回的限位、滑轨支架的上下极限、箱盖的上下极限。需要输出量9 个,其中包括:液压泵驱动电机启动、滑轨支架的推出与收回、抓取手爪抓住垃圾桶与松开垃圾桶、抓取手爪将垃圾桶举到料口和降到地面、箱盖的打开与关闭。另外需要一个定时器,用于垃圾桶倾举升到极限位置倾倒的延时[15]。输入输出接口均与CPU 相连,系统的电气接线路如图4所示。
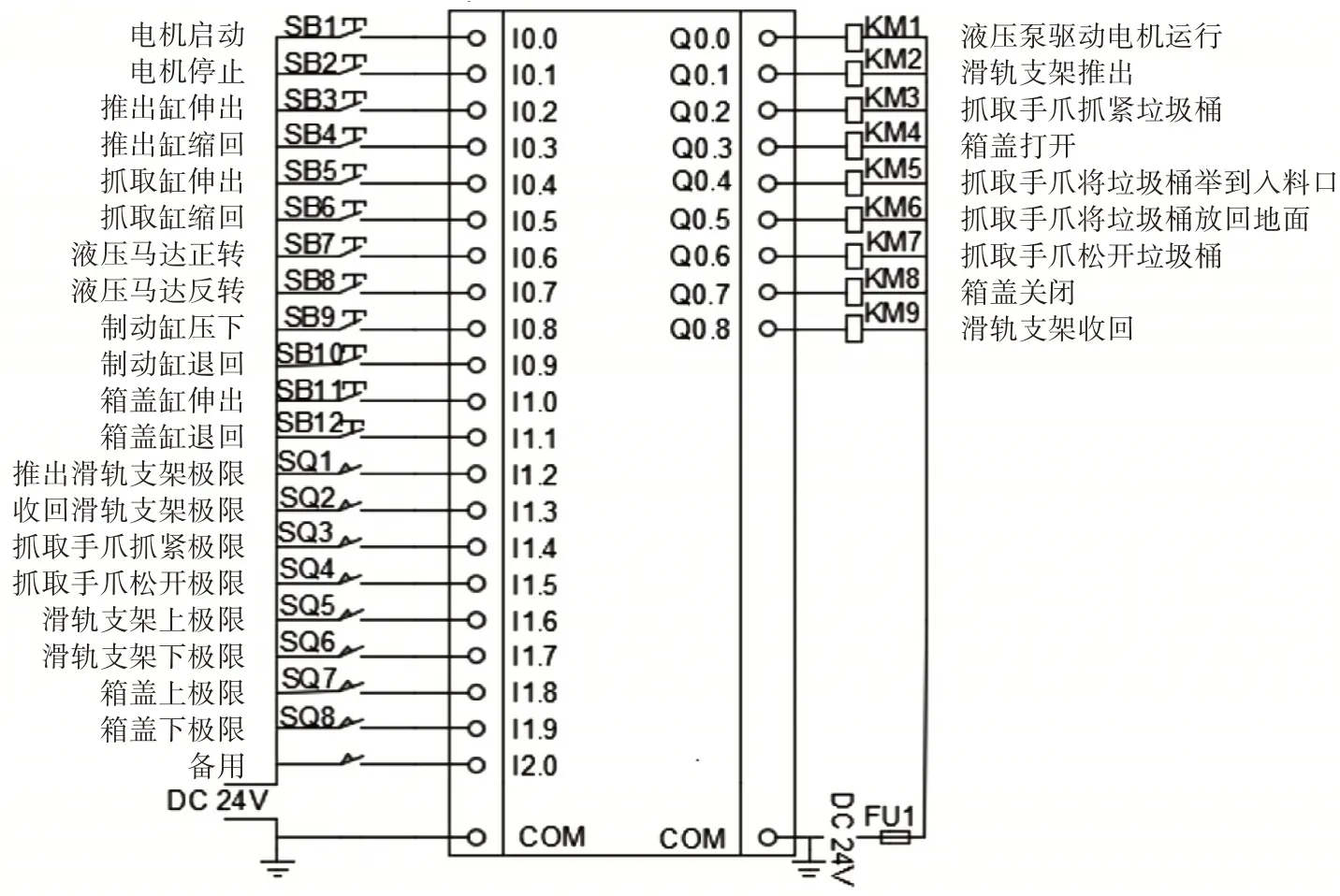
图4 PLC接线图
4 结语
通过PLC控制的液压系统,驱动上料机械手的各个机构顺序地动作,完成垃圾桶内垃圾倒入车载收集箱的过程。整体设备实现了机电液一体化的设计,运动平稳,具有良好的自动化水平,可以运用在城市街道和乡村主干道的路边垃圾收集,快速地实现各个垃圾点的垃圾回收。
