混合推进航天器行星悬浮轨道附近编队构型保持研究
2022-08-02袁长清龚胜平贺京九
赵 磊, 袁长清*, 龚胜平, 贺京九
1. 空军航空大学,长春 130022 2. 清华大学,北京 100090
0 引 言
深空探测使得人们更加了解地球乃至宇宙,对科技进步和文明发展有着深远意义;而探测任务需要航天器具有长航时、质量小等特点,为了减少燃料消耗、节约成本和避免羽流污染,先后提出多种推力方式,如库仑力、磁通钉效应、电磁力、洛伦兹力以及太阳帆等.近年来,对于库仑编队和太阳帆编队的研究众多,这类非接触内力作为新兴技术开辟了航天器编队研究的新方向.
库仑力编队飞行是通过离子喷射器喷射离子,使航天器带电,利用其静电库仑力实现航天器间的排斥或吸引,通过控制所带电荷情况,使编队航天器在一定空间位置上保持运动的平衡和稳定.在库仑力编队飞行研究领域,KING等[1]在2002第一次提出将静电力运用到航天器编队领域,自此吸引了国内外学者对库仑编队进行广泛的研究.太阳帆推进是一种连续小推力的航天器推进方式,主要通过太阳光子撞击帆面进行动量交换,对航天器产生作用力.优势在于采用太阳光压力作为动力,可以减小燃料的消耗,避免羽流污染,并且可以持续对航天器进行加速,运行时间累加后可以获得较大加速度.太阳帆推进的概念最早由TSIOLKOVSKY在1921年提出,目前已广泛应用于平动点轨道[2-3],halo轨道,悬浮轨道[4]等处的探测任务.现阶段,单纯使用某一种非接触力作为推进方式,很难满足航天器执行复杂轨道飞行任务的要求;所以,混合动力成为目前航天器编队领域重要的研究方向.由于太阳光压力是系统外力,单纯太阳帆无法产生指向太阳的推进力分量,且仅靠帆面姿态角调控存在欠驱动问题.库仑力作为编队系统内力,作用在航天器连线方向,主要负责维持编队星间间距,无法改变系统角动量用于转向.针对上述不足,本文考虑将航天器间库仑力与太阳帆推进技术相结合,采用混合推进方案控制编队.库仑力可以提供沿太阳方向的推进力分量来解决欠驱动问题,考虑到以往深空编队研究主要基于大尺度编队(几千到几十千米),库仑力的引入可以实现深空近距离编队;太阳帆则可提供星间连线方向以外的推进力用于转向,改善库仑编队的可控性;同时,两者均是无推进剂消耗推进方式,具有控制精度高、所需能耗低且无羽流污染等优点,可以有效提高航天器续航能力.
在混合推进航天器方面的研究,MENGALI等[5]研究了混合小推力航天器在金星和火星之间的转移轨迹,利用间接优化法求得最优轨迹.SIMO等[6]对混合帆在平动点轨道运行进行了研究,基于反馈线性化方法实现了轨道的保持控制.张楷田等[7]设计了自抗干扰控制方式,实现了将太阳帆和电推进结合的混合推力航天器编队在日心悬浮轨道附近运行的保持控制.清华大学龚胜平等[8-9]对太阳帆航天器进行了深入的研究,并将日心悬浮轨道和行星悬浮轨道按照各自周期的不同进行了分类;针对各类悬浮轨道,在其附近对编队相对运动方程进行线性化处理,推导了能够稳定运行的区域,并基于间接法研究了混合帆轨道转移优化中的两点边值问题.覃曌华、付磊等[10]基于混合帆在地球同步悬浮轨道附近的运动,设计了最优推进策略.陈弈澄针对采用太阳帆、太阳电混合推进的航天器,运用精度较高的滑模控制器,对其在日心悬浮轨道处的运动进行了有效控制,提高了系统的稳定性,减少了轨道位置超调量[11].左晨熠等[12]提出了一种将太阳帆和库仑力结合的新兴混合推进方式,设计了LQR控制律,对两星在日心悬浮轨道附近的编队保持进行了控制.
本文基于采用太阳帆和库仑力结合的方式,克服了太阳帆无法提供指向太阳方向的推进分量的缺陷,使编队更适合执行复杂任务;基于这种推进方式建立了在行星悬浮轨道附近航天器的编队动力学模型,推导了其相对运动方程,利用积分滑模控制方法,通过调节太阳帆角度和库仑电荷积大小,来实现对编队飞行的控制;最后,通过数值仿真验证了控制器的快速性和有效性.
1 混合推进航天器动力学建模
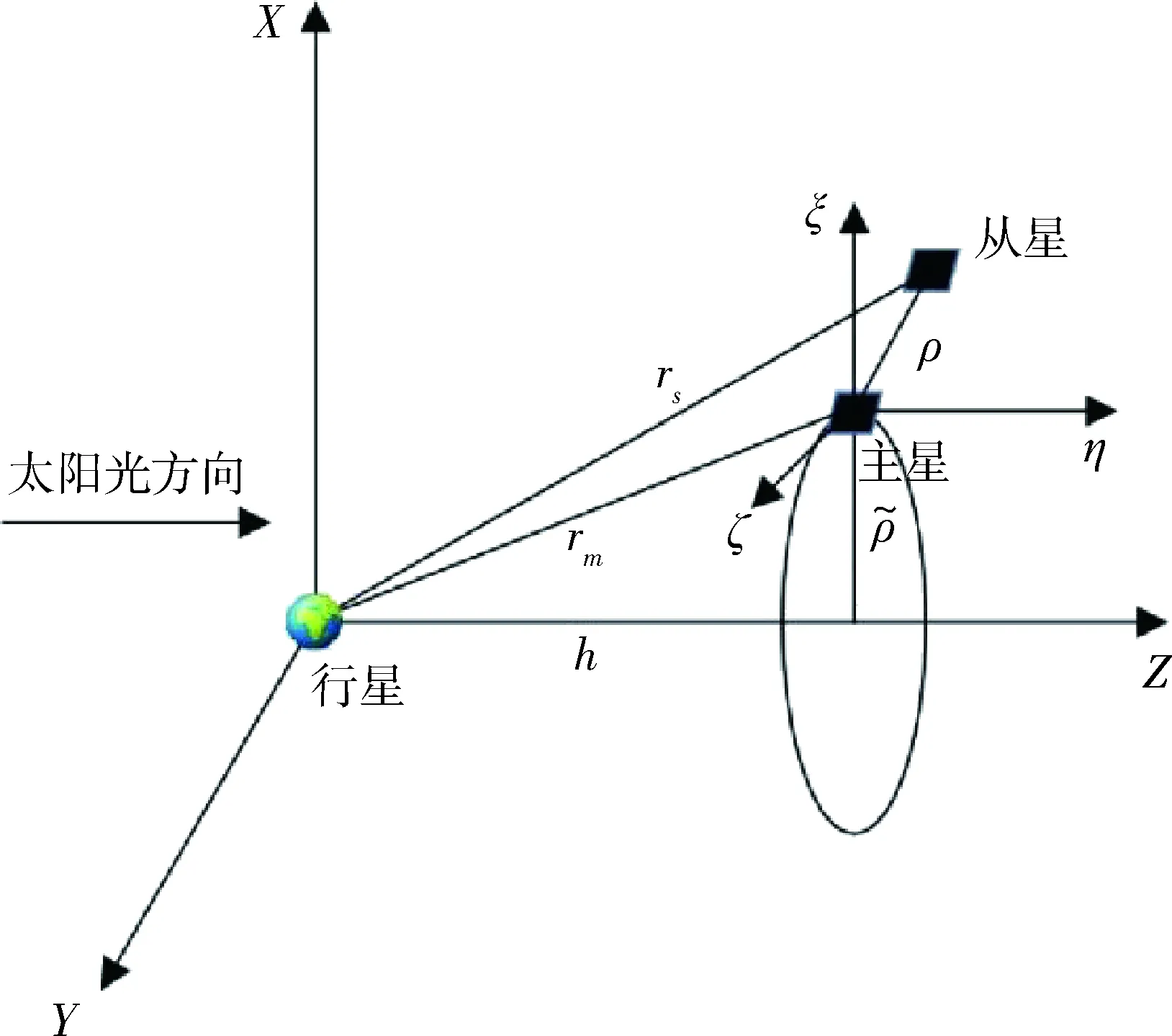
图1 行星悬浮轨道Fig.1 Planet-Centred displaced orbit

在惯性参考系中,主星和从星的轨道动力学方程分别为
(1)
(2)
联立式(1)、(2)得到在惯性系下的相对运动方程为
(3)

(4)

(5)


(6)
为了保持从星在主星附近,两星太阳帆的太阳光压加速度和法线方向需要接近,于是可以将fs(rs)在主星的在特征加速度和法线(nm,κm)处展开,取线性化部分得

(7)
式(7)中E3=diag{1,1,1},线性化后相对运动方程可以写成

(8)
在旋转坐标系下,ρ和ω写成向量形式
ρ=[xyz]T
(9)
ω=[0 0n]T
(10)
rm=(〗rm0 0]T
(11)
rs=[rm+xyz]T
(12)
接下来对于引力函数的处理与C-W方程类似,

航天器间的相对距离ρ远小于航天器到地球的距离rm、rs.对地球引力函数进行线性化处理,忽略高阶量可得

(13)

(14)
将式(9)~(14)代入式(8)可以得到简化后的相对运动方程
(15)
等式右边分别为库仑力fc和太阳光压力fu在三轴的分量.
因为在行星悬浮轨道附近太阳光方向近似平行于旋转坐标系的η轴,所以帆面法向和太阳光的夹角α与其和η轴夹角相等.帆面法向量在旋转坐标系中可表示为,θ与φ的定义参看图2.

(16)
图2 太阳帆法线在旋转坐标系下的描述Fig.2 Description of solar sail normals in orbital coordinates
太阳帆法线在旋转坐标系中表示为
(17)
δn变分可以线性化为[9]
(18)
代入相对运动方程得到各坐标轴方向分量中

(19)
本文考虑为半自然编队,所以主从星帆面面质比相同,即δβ=0(在行星附近运动,两星到太阳距离近似相等,所以δκ也是零).代入进一步简化

(20)
混合推进加速度在三轴上的分量为

(21)
主太阳帆认为在行星悬浮轨道上处于稳定状态,需要有一个稳定的姿态角,角度值可由文献[14]中得知.而半自然编队[15]中,控制从航天器跟踪主航天器,在悬浮轨道附近实现稳定编队,需要对从星太阳帆姿态角φ和库仑电荷积Q进行调整,来实现编队构型的快速控制.
2 控制器设计
本文设计的积分滑模控制器是基于传统滑模控制的一种改进形式.一般滑模控制包含趋近段和滑动段,在趋近段,系统的状态量运行一段时间后会到达滑模面,接着在滑模面的约束下,状态沿滑模面运动直至到达理想值.而积分滑模控制消除了趋近段,保证了系统的状态能够迅速达到滑模面,从而使得控制系统在整个运行过程中都具有较强的鲁棒稳定特性.
(22)
其中u=[axayaz]T为控制输入,具体的控制变量为从星帆面的姿态角φ以及主从星电荷积Q.
(23)
设计的控制器可以使从星和主星的实际相对距离x1(t)跟踪预设参考距离x1d(t)=[x0y0z0]T,定义相对距离误差为e=x1(t)-x1d(t)=[exeyez]T,目的是使e→0.
系统的滑模面

(24)
取参数为正定对角阵
kp=diag{240,240,240},
ki=[0.6 0.6 0.6].
抑制滑模控制的抖振现象,指数趋近律取值为

(25)
其中,参数P,k为
P=diag{0.01,0.01,0.01}
k=diag{0.08,0.08,0.08}
最终得滑模控制律为

(26)
式(26)给出的是将从星维持在预设轨道所需要的输入加速度,对于本文中混合推进航天器,输入加速度主要由太阳帆姿态角和库仑电荷积提供,所以姿态角和电荷积才是真正的控制变量,根据仿真结果得到控制输入u在三轴的分量,利用化简后的加速度式(21)来直接求解控制变量θ,φ比较容易,方程耦合性不强,这里不再做控制变量分配的工作.
3 数学仿真

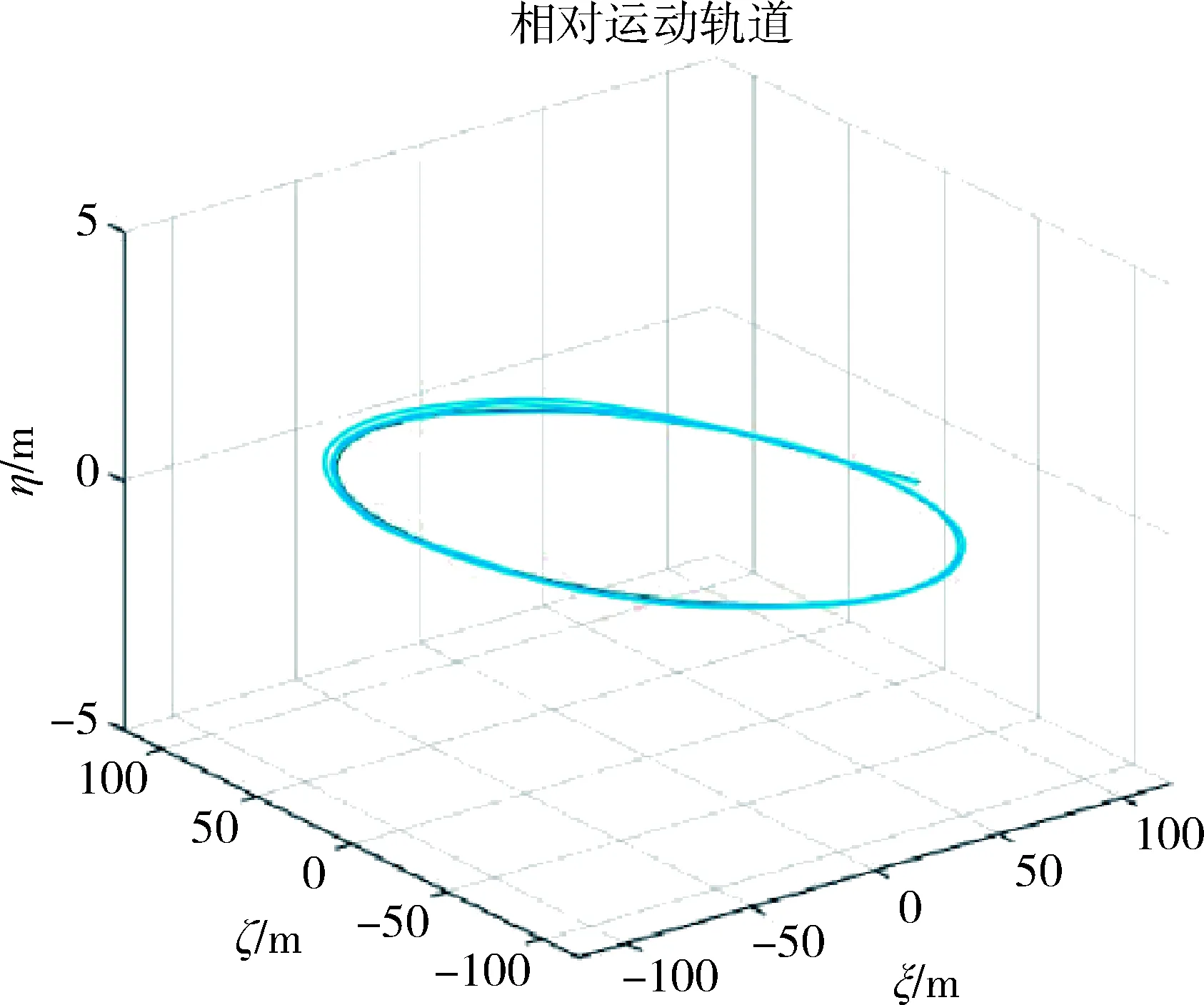
图3 相对运动轨道Fig.3 Relative motion orbit
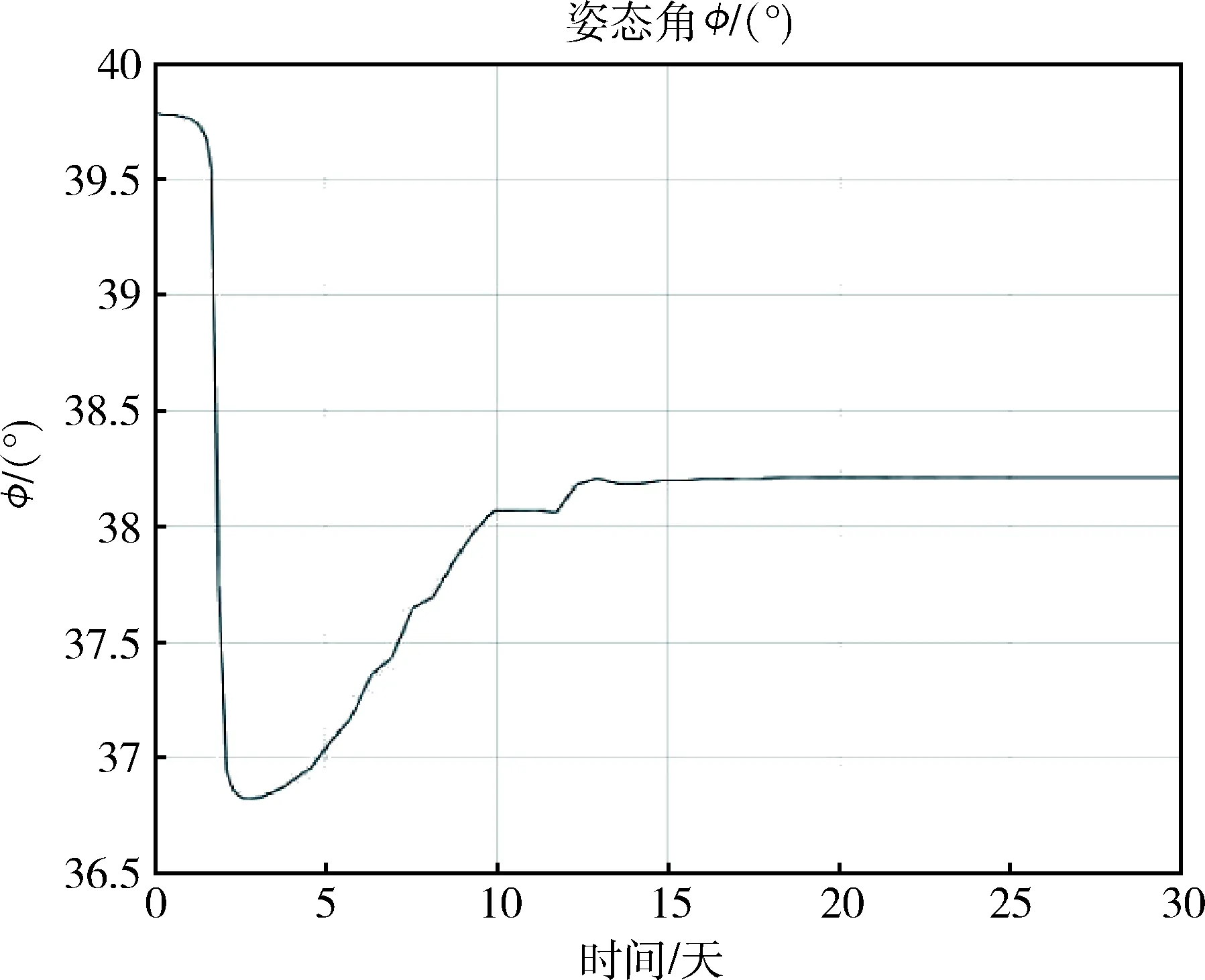
图4 太阳帆姿态角变化Fig.4 Attitude angle change
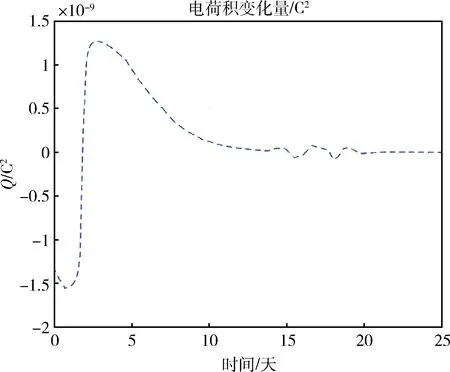
图5 电荷积变化曲线Fig.5 Charge’s change
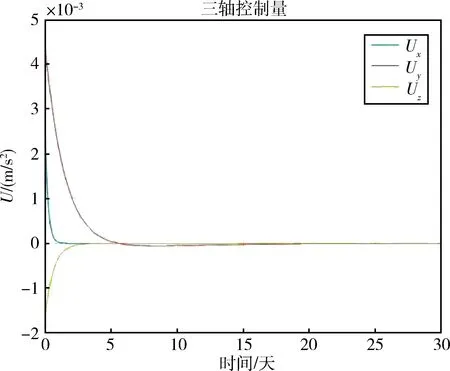
图6 三轴控制量Fig.6 Control force acceleration
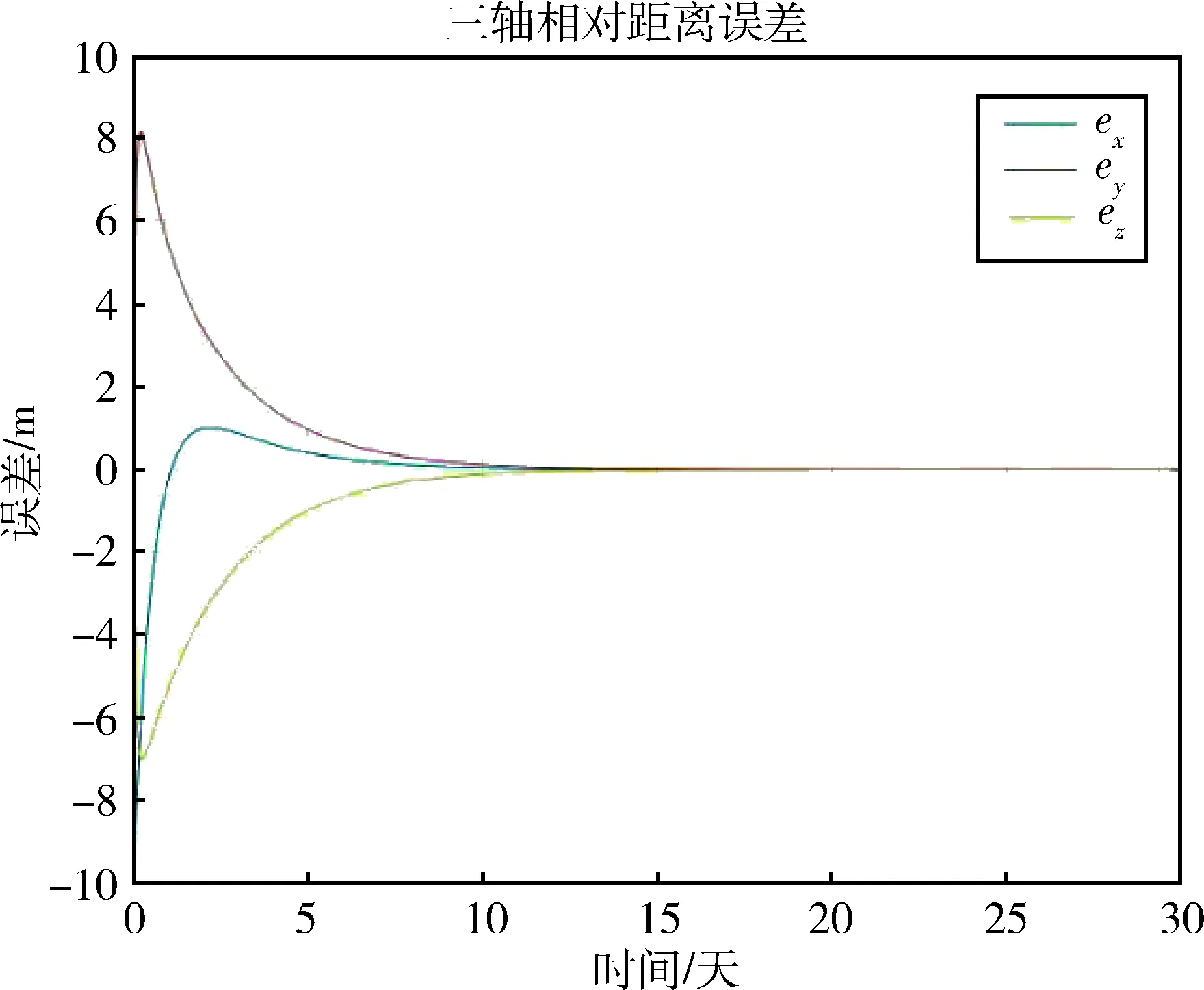
图7 三轴相对距离误差Fig.7 Relative distance error

图8 三轴速度误差Fig.8 Relative velocity error
图3为航天器在积分滑模控制器控制下的相对运动轨迹,表明从星通过控制器调整,消除初始误差后,迅速到达预定轨道,控制效果良好.图4为从帆姿态角的变化,15天之后,姿态角基本稳定在相应角度附近,呈现小角度波动,持续提供小推力控制.图5表示编队卫星电荷积随时间的变化曲线,控制器通过不断充放电来调整星间库仑力大小,初始扰动带来的误差需要约20 h进行调整,使两星间距离达到期望距离,之后电荷积基本保持不变,后续变化曲线便不再予以展示.图6展示了太阳光压和库仑力合作用带来的加速度变化,15天左右控制量基本保持稳定.图7展示了在仿真过程中两星间相对距离变化情况,由图7可以看出,在初始状态,x轴负方向存在一个初始误差项,可见,15天之后,相对距离基本符合预设参考距离,稳态误差控制在10-4量级.图8为速度误差随时间变化曲线,可见15天内是调节稳定过程,随后构型达到稳定,状态量趋于平缓.上述结果表明混合推进航天器在行星悬浮轨道附近可以稳定地进行长周期编队飞行,且能耗小、避免羽流污染.
4 结 论
本文主要研究了基于库仑力—太阳帆混合推进航天器在行星悬浮轨道附近编队构型保持与控制问题.考虑太阳帆为理想太阳帆模型,即光照利用无损失且不考虑外界物体对帆面的遮蔽效果,建立动力学模型,对相对运动方程进行线性化处理.利用积分滑模控制方式对太阳帆的姿态角及航天器间库仑力大小进行控制,来实现编队构型的改变和保持.该方法具有简单可控、响应迅速且对模型依赖程度低等优点.通过数值仿真验证了该方法的有效性,表明悬浮轨道处航天器编队在存在初始扰动的情况下,通过滑模控制能迅速控制到参考轨道附近,并且能够长时间稳定运行.
