一种运载火箭自适应增广控制器设计方法
2022-08-02佘宇琛胡存明丁寰毓
桂 亮 佘宇琛 胡存明 丁寰毓
上海航天控制技术研究所,上海 201109
0 引 言
运载火箭的控制器设计是研制过程中非常重要的环节,直接关系到火箭的稳定和飞行的成败。在传统运载火箭研制任务中,控制系统普遍采用PD控制器加校正网络的设计方式[1],该方法在过去几十年的工程实践中得到了广泛应用,表现出了良好的可靠性和工程适应能力。但是,PD控制器的设计往往对运载火箭的动力学模型精度以及飞行环境有着较为严苛的要求。随着运载火箭技术的发展,其研制流程不断优化,低成本商业发射、快速响应发射等任务需求逐年增加。出于成本和技术上的考虑,未来的运载火箭可能略过模态试验等研制流程,并且还要具备不同发射场、不同气象条件、不同弹道的冗余发射能力[2]。以上这些改进必然导致火箭的动力学模型偏差增大,飞行环节复杂等不利结果,从而对控制系统的鲁棒性提出了更高的要求。在此必然趋势之下,传统的PD控制器与校正网络的组合将难以适应未来的发射任务,研制更先进控制器的需求日益紧迫。
近年来学者们就运载火箭先进控制器设计的问题展开了深入的研究,提出了多种解决方案。主要的思路集中在对现有增益预置法的改进、针对先进执行机构的控制方案设计和变结构控制器设计3个方面。首先,增益预置法本质上可以看成一个多学科建模与寻优设计问题[3]。因此对此种方法改进的主要思路包括利用T-S模糊理论提高设计结果的鲁棒性[4]、利用进化遗传算法[5]、神经网络算法提高寻优效率等[6]。其次,在先进执行机构的控制方案设计方面,现阶段研究主要体现在考虑复杂伺服机构特性的摇摆优化控制[7]、基于先进角度传感器的主动减载技术[8]等。最后,在变结构控制器设计方面,其具体表现为自适应增广控制[9]、L1自适应补偿控制[10]以及滑模便结构控制[11]等。可以看出,改进增益预置设计算法的难度较大、涉及学科众多且对控制系统效能提升有限;采用先进执行机构的思路对执行机构单机、硬件环境要求较高;而先进控制器设计则更聚焦于控制理论本身,在现有任务环境下通过引入更先进的控制算法达到更好的控制效果。因此,本文的讨论也将聚焦于先进控制器设计层面。
自适应增广控制(adaptive augmentation control,AAC)是一种较为经典的自适应控制方法。在运载火箭控制领域,NASA在2008年前后进行“星座”计划论证时,对基于AAC的Arex I重型运载火箭控制技术进行了全面深入的研究。虽然“星座”计划最终下马,但是为该计划论证的重型运载火箭项目得以保留,并转为今天的太空发射系统(Space Launch System, SLS)项目。而AAC控制器也将被应用于该型火箭进行飞行验证。在现阶段的设计中,AAC控制器主要由参考模型、频谱阻尼器和回归项3部分组成[10]。控制系统在飞行过程中,根据箭体弹性、刚体等特性,通过对上述3部分求加权平均数,最终决定对当前控制器的带宽进行增强或者减弱[12]。其中,频谱阻尼器暂时无法从Lyapunov稳定的角度对其进行证明,这也为控制系统的安全带来隐患。另外,由于AAC控制器结构复杂,参数众多。而在控制器结构确定的情况下,不同的参数选择也会对系统的安全稳定产生决定性的影响[13]。在现阶段的研究中,很少有学者从工程实践的角度出发,对AAC控制器的全套控制参数进行梳理,并系统地给出每一个参数的设计方法。为此,本文将聚焦于现阶段AAC控制器研究的不足,尝试在假定PD控制器稳定的前提下,证明AAC控制器的引入不会破坏PD闭环系统的稳定性;并针对AAC的众多控制参数,结合工程实际需求给出一套AAC控制器的参数设计方法。
本文的论述主要分为以下几个部分:第1章主要聚焦于运载火箭动力学分析,证明AAC控制器的引入不会破坏PD闭环系统的稳定性;第2章给出AAC控制器的设计流程和参数计算方法;第3章通过数学仿真的方式验证本文提出的参数计算方法的有效性;第4章给出结论并对未来工作进行展望。
1 运载火箭动力学模型与稳定性分析
运载火箭本身是一个复杂的非线性动力学系统,在控制器设计过程中,一般将其姿态动力学简化为一个近似的偏量动力学模型,其基本形式可以在文献[14]中找到。该模型为一个小偏量线性动力学方程组,为了研究方便,将其进一步写成如下的矩阵形式:

(1)
其中,X为火箭状态向量,包括箭体俯仰角、角速率、弹性模态广义位移、液体晃动位移等;A,B分别为n×n,n×m矩阵,其中n为火箭状态量个数,m为发动机个数。u为控制输入,即各个发动机的摆动角度。值得注意的是文献[14]中的动力学模型以俯仰方向为例,但一般运载火箭成轴对称状态,因此俯仰偏航动力学模型的形式基本一致。而滚动通道一般控制能力较强且刚度较高,因此一般采用近似刚体模型对其进行描述。本文的讨论主要聚焦与俯仰、偏航通道中AAC控制器的设计,因此暂不考虑滚动通道的动力学模型。在上述简化动力学模型的基础之上,传统的PD加校正网络控制器所获得的闭环动力学系统可以写成:
(2)
其中,Anet,Bnet,Cnet,Dnet为校正网络的时域模型,k为PD控制器增益,以上参数均可人为设计。上述动力学系统可以改写成矩阵形式:

(3)
其中:
(4)
在一般情况下,通过合理的裕度分析,可以寻找到一组控制参数,使得箭体稳定。该结论通过Lyapunov稳定性表述可以写成:
(5)
由于PD加校正网络控制器能够使箭体稳定,因此必然有Lyapunov导数小于0:
(6)

(7)
其中,εmax为当前选定的k所对应的集合K边界,即k能接受的最大偏差。


图1 带有AAC控制器的运载火箭框图
(8)
其中,kmax为ka限幅值,α,a,β为加权系数,k0为定值,此处取0.7。er为参考模型与真实箭体之间的姿态角偏差。从上述公式可以看出, AAC控制器是由3个部分共同构成的微分方程的解,将这3个部分分别命名为:参考误差项、频谱阻尼项和回归项。下面对上述公式的3个部分分别进行论述。
1.1 回归项对系统稳定性的影响
将kT表达式集成进入式(3),则有:
(9)
通过式(6)的结论可知,由于k>0,当|kT-1|≤εmax,则|k·kT-k|=k·|kT-1|≤k·εmax,因此根据式(7)可知:

(10)
在以上结论的基础上,仅考虑回归项的情况下,取Lyapunov函数V1=V+0.5kTΛk,其导数为:

(11)
其中Λ为正定系数矩阵,可以根据实际情况选取。
由于已知Λ·β>0,因此必然有(X′TB′X-Λβ)≤X′TB′X<0,则:
(12)
至此,可以证明在k·kT=k′∈K的条件下,回归项不会影响PD闭环系统的稳定性。
1.2 参考误差项对系统稳定性的影响
参考误差项的稳定性证明可以借鉴传统的模型基准自适应控制或其他自适应控制方法[9]。首先,定义参考模型为:
(13)
其中,Xm为参考模型状态量,uc为姿态程序角。Am和Bm为n×n,n×m矩阵。注意到Am为负定矩阵,uc为开环输入信号,用于求解微分方程特解,因此上述系统必然稳定。若参考模型延迟很小、动态特性良好,应有uc≈Xm。er表达式为:

(14)

(15)
在不加入AAC控制器的情况下,令k∈K,此时k为定值,因此kTΛk导数为0,则根据式(6)的结论有:

(16)
对运载火箭而言,程序角一般大于等于0,因此uc≈Xm≥0。可以看出,εmax和δB可正可负。为了确保上式成立,则令εmax=|εmax|sign(δB)。因此上式可以写成:

(17)


(18)
取Λ=|δB|kmax/a,且已知0<(kmax-ka)≤|εmax|,则必然有:

(19)
至此,可以证明参考误差项不会影响PD闭环系统的稳定性。
1.3 频谱阻尼项对系统稳定性的影响
针对AAC控制器的频谱阻尼项,可以采用1.1节中类似的证明方法分析其对PD控制器稳定性的影响。根据式(6)~(7),有:
(20)
取Lyapunov方程V3=V+0.5kTΛk。根据框图1以及滤波器的基本工作原理,可以得知ys=DT(o2)≥0,其中DT(·)为低通滤波器算子,o为高通滤波器的输出信号。所以有:

(21)
至此,已经分别证明在式(7)成立的前提下,AAC控制器的3个部分不会破坏闭环系统的稳定性。该结论是建立在PD闭环控制器本身未超出裕度范围k∈K的前提下的。因此,除了AAC控制器的公式以外,对kT的上下限限幅的确定同样至关重要,应该确保|kT-1|≤εmax的基本条件[11]。
2 自适应增广控制器设计
AAC控制器参数众多,且参数之间彼此存在耦合关系。这些参数可以分为4大类,归纳为如表1所示。下面将分别从以下4大类进行论述。

表1 AAC控制器参数汇总
2.1 基本参数设计
基本参数主要包括kT的上下限限幅以及用以计算ka积分所需的参数。通过第1章的结论,可以得知kT的限幅必须满足|kT-1|≤εmax。因此kt_min,kt_max的值可以定为:
kt_min=1-|εmax|,kt_max=1+|εmax|
(22)
由此可见,整个过程中AAC控制器都将在PD控制器裕度范围内运行,以确保系统安全。
2.2 参考模型参数设计
参考模型的设计需要借助运载火箭动力学模型。参考模型可以采用刚体运载火箭姿态动力学传递函数[15]:
(23)
对于kmax,则可以基于2.1节中的结论,用如下公式得到:
kmax=kt_max-k0=kt_max-kt_min
(24)
结合实际任务需求选择权重系数a。
2.3 频谱阻尼参数设计

最后,频谱阻尼项权重系数α的计算需要利用数量级计算的方式进行制定。其基本思路为:当ys达到一定数量级时,Qk≥0应该令频谱阻尼输出约等于参考模型输出,从而降低kT,抑制振动。基于以上思路,α的值可以通过式(25)获得。
(25)
其中,S(·)为数量级计算算子,例如S(6.5·10-3)=10-3。
2.4 回归项参数设计
回归项权重系数β的确定同样需要采用数量级计算的思想。由于已知kT在1附近变化,因此kT-1必然在10-1数量级,为了让回归项起到稳定kT变化的作用,需要让它的输出始终与前两项保持同一数量级,因此有:
(26)
3 仿真校验
3.1 弹性参数大偏差仿真
为了验证AAC控制器对弹性参数偏差的应对能力,将采用文献[15]所述的动力学参数,并根据国外文献中公开的参数拉偏方式,将火箭的弹性相关参数拉偏40%。用PD控制器和AAC控制器尝试对该系统进行控制,得到的控制结果如图2~4所示。从仿真结果可以看出:此种工况下,传统PD控制器将无法有效控制箭体。但是,AAC控制器可以有效抑制弹性振动,并稳定箭体姿态,体现了AAC控制器的优越性。

图2 弹性参数大偏差下俯仰角偏差曲线

图3 弹性参数大偏差下偏航角曲线

图4 弹性参数大偏差下kt变化曲线
3.2 刚体参数大偏差仿真
为了进一步验证AAC控制器对刚体参数偏差的适应性,将火箭的刚体相关参数拉偏45%。此种工况下PD控制器和AAC控制器的控制对比结果如图5~7所示。从图中可以看出,由于刚体偏差很大,导致控制能力不足,因此传统PD控制器在外界干扰下将直接发散。而AAC控制器却可以在此种恶劣情况下实现对火箭的稳定控制。
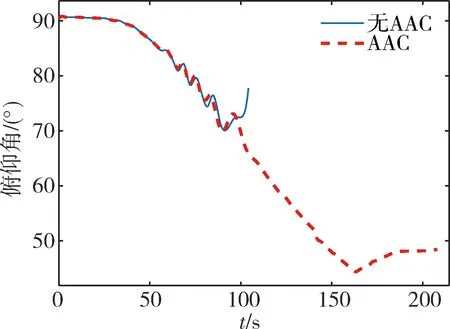
图5 刚体参数大偏差下俯仰角曲线
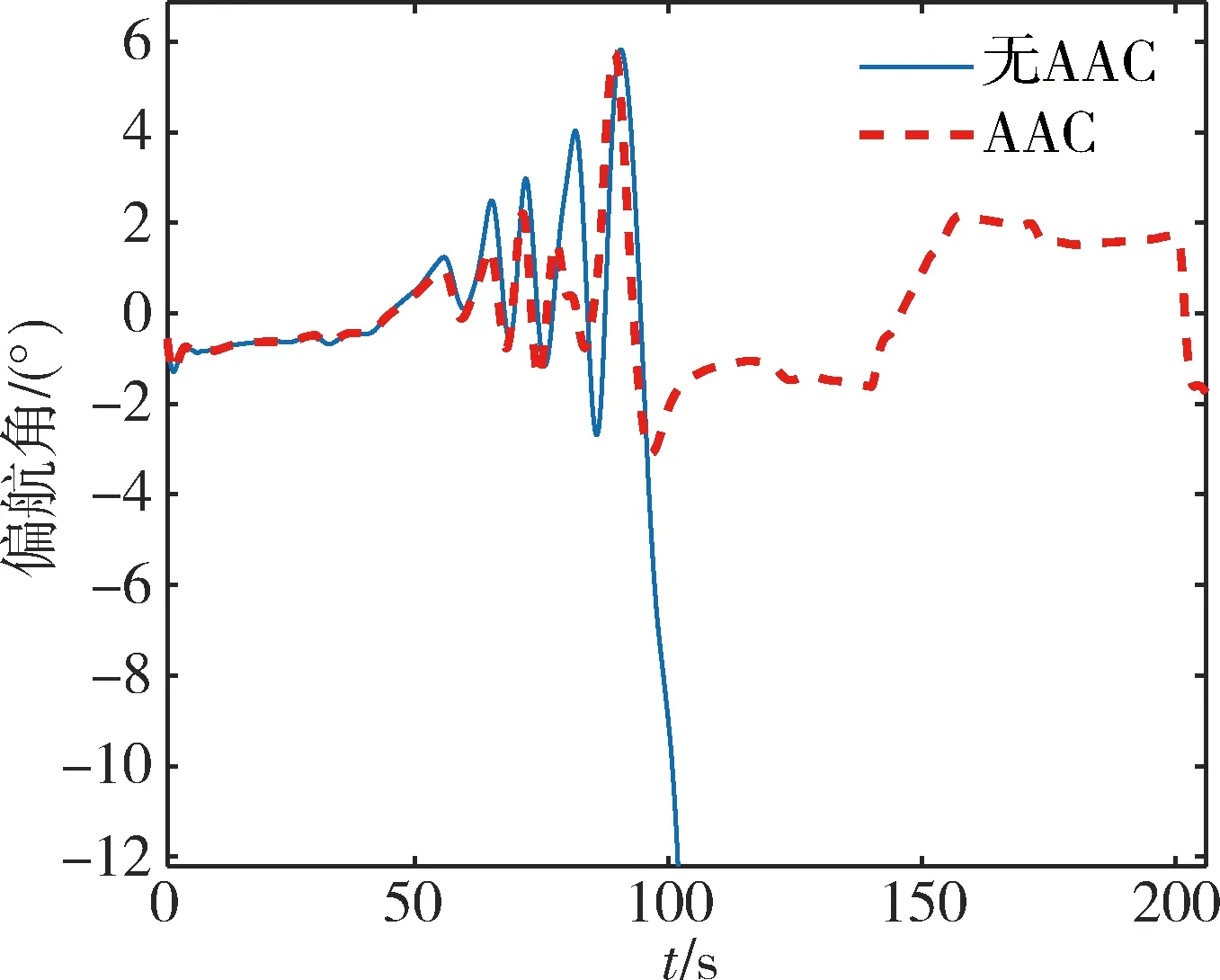
图6 刚体参数大偏差下偏航角曲线
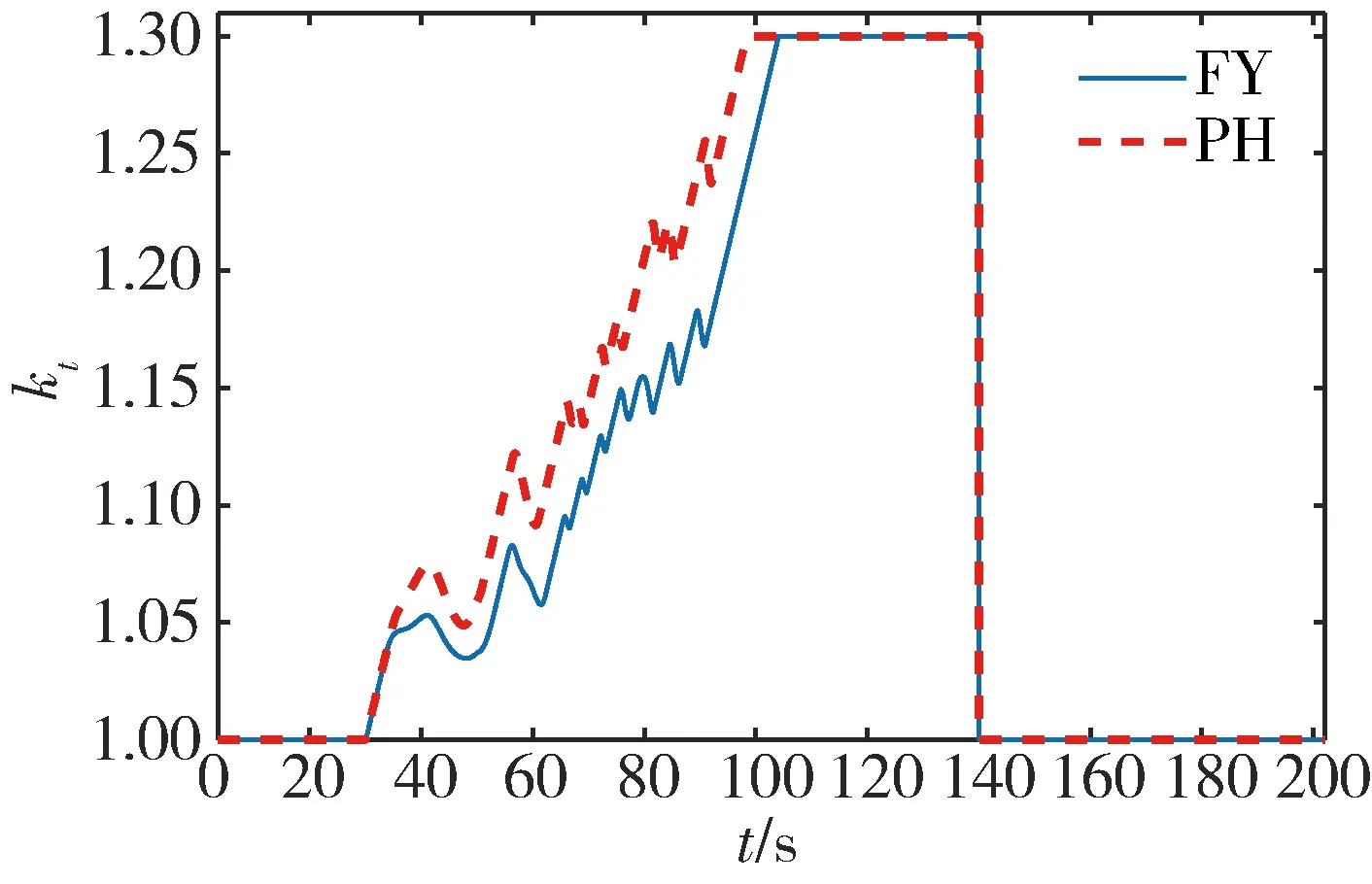
图7 刚体参数大偏差下kt曲线
4 结 论
本文对AAC控制器的稳定性进行了分析,并提出了一种AAC控制器参数设计流程。基于数学讨论和仿真结果,可以得出以下结论:1)在充分分析PD控制器稳定裕度的前提下,加入AAC控制器能达到提高鲁棒性且不破坏原有系统稳定的效果。2)AAC控制器参数较多,本文提出的参数设计流程可以有效提高参数设计效率。仿真结果证明AAC控制器在刚体稳定和弹性抑制2个方面都具备更高的适应能力,有良好的工程应用前景。
