车载LiDAR技术在高速公路改扩建勘测中的应用
2022-08-01李通
李 通
(山东省国土测绘院 山东 济南 250103)
0 引言
随着社会经济的快速发展,我国机动车保有量迅速增加,高速公路的通行压力也急速上升,很多高速公路已经大幅超过了其设计通行能力,高速公路改扩建也逐渐成为目前公路建设领域的热点[1-3]。高速公路改扩建项目对路面的测量精度要求较为严苛,平面位置中误差优于5 cm,高程中误差优于2 cm。目前,多数高速公路改扩建勘测项目还是采用传统的全球定位系统(global positioning system,GPS)、实时动态载波相位差分技术(real-time kinematic,RTK)、全站仪、水准测量等方法进行路面测量[4-6],不仅测量效率低下,勘测周期长,难以满足工期要求,还需要对既有道路进行交通管制,影响道路正常通行,并且存在巨大的安全隐患[7-11]。
目前,车载激光雷达(light detection and ranging,LiDAR)测量技术日益成熟,也应用到了公安、市政、交通等诸多领域,该技术不仅能够获取线路的全景影像数据,也能够同时获取点云数据。本文以京藏高速公路改扩建项目为例,对车载LiDAR应用于高速路改扩建的关键技术进行了详细介绍,首先采用车载LiDAR技术对既有道路路面进行扫描,获取路面点云数据,然后采用不同的纠正方案对数据进行高精度的纠正,最终得到了满足精度要求的成果,并总结出了完整的技术方案,对以后的同类项目有重要的借鉴意义。
1 设计方案
京藏高速公路改扩建(银川段)是国家重点工程项目,我院合同段长度约40 km,根据项目勘测设计大纲要求,路面测量精度平面位置中误差应优于5 cm,高程中误差应优于2 cm[3]。传统的测设方案是先在沿线布设一定数量的控制点然后利用水准测量、全站仪、GPS RTK等手段测定路面数据,工作量巨大,并且测设人员需要上路测量,影响道路通行,存在很大的安全隐患。基于此,项目组提出了采用车载LiDAR扫描系统进行数据采集,并通过预先布设的路面靶标控制点对数据进行纠正,测设技术路线如图1所示。

图1 测设技术路线
1.1 地面靶标布设与测量
常规条件下,车载LiDAR系统测量点云数据的平面和高程精度在10 cm左右,无法满足高速公路改扩建的精度要求[3],所以需要对原始数据采集、点云计算平差等环节进行控制和改进,并布设一定数量的地面靶标控制点对点云数据进行高精度纠正。本项目为了检验不同间距靶标控制点的纠正效果,其布设间距控制在100 m左右,沿道路两侧应急车道布设,布设尺寸应当根据点云的密度进行计算,一般长边边长应在点云间距的6~10倍,本项目布设的地面靶标控制点如图2所示。靶标控制点的平面位置采用带简易三脚架的GPS RTK方法测量,每个点测量3个测回,每个测回测量30 s,测回间互差不超过3 cm,高程采用四等水准的方法测量,并进行严密平差。

(a)形状图 (b)显示效果图图2 靶标控制点
1.2 车载LiDAR扫描
本项目采用国产的SSW车载移动测量系统进行线路的扫描测量,获取的点云间距为5~7 cm,在进行扫描的同时需要在高速公路沿线布设一定数量的GPS地面基站与车载定位定姿系统(position and orientation system, POS)系统同步观测,相邻基站的布设间距不超过10 km。另外,在扫描作业开始前需要与高速公路路政部门做好沟通,协调其做好保障工作,扫描过程中车速应控制在60 km/h,尽量保持匀速行进,避免与大型车辆距离太近,以保证GPS信号及惯导状态良好。
1.3 数据处理
车载LiDAR扫描数据处理包括POS解算与点云解算、点云数据高精度纠正等。
1.3.1点云解算
点云解算采用随机的软件进行。首先利用IE软件进行POS数据解算,输出姿态结果,然后进行点云解算,输出las格式的点云数据。输出的线路点云数据如图3所示。

图3 线路点云数据
1.3.2点云数据高精度纠正
由于获取的点云数据精度在10 cm左右,无法满足高速公路改扩建的精度要求,因此需要利用地面靶标控制点成果进行平面位置和高程的高精度纠正。
(1)平面位置纠正。点云数据平面位置纠正采用分段仿射算法进行,包括采集控制点对应的目标点点云坐标、点云平面纠正、精度检查3个步骤。其数学模型为
式中,(X,Y)T为校正后点云平面坐标;(x0、y0)T为校正前点云平面坐标;a、b、c、d、dx、dy为仿射变换参数。
(2)高程纠正。点云数据高程纠正采用三角网法进行,包括采集控制点对应的目标点点云高程、点云高程纠正、精度检查3个步骤,其原理如图4所示。首先计算地面靶标控制点位置点云数据与控制点的高差dz,生成覆盖点云数据的最小外接矩形,再将外接矩形的顶点和控制点进行构网,建立改正模型。
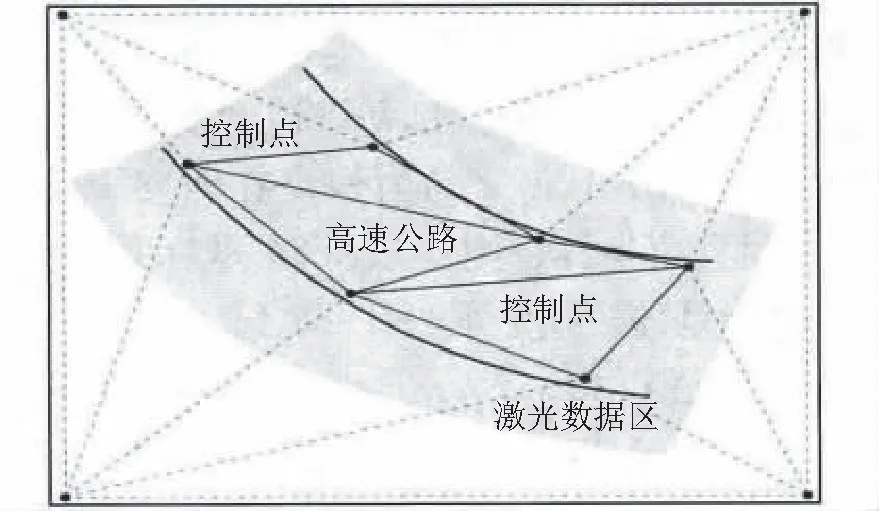
图4 算法原理
假定改正模型中三角网的3个顶点坐标为(x1,y1,z1)、(x2,y2,z2)及(x3,y3,z3),一般地面靶标控制点之间的距离比较短,可以近似认为每个三角形范围内高程异常呈线性变化,则可得
由上式可得点云数据高程改正值:
式中,xi,yi(i=1,2,3);dzi(i=1,2,3)为三角形顶点点云高程与控制点高程差值;x、y为点云的坐标;dz为点云的高程改正值。
2 结果分析与评价
为了对实验方案的成果进行验证,沿实验段路面每3 km为一个测段,每个测段抽取1 km,布设检核点间距为20 m,检核点位布设在应急车道上,检核点平面位置采用带简易三脚架的RTK进行测,每点测量3个测回,每个测回测量20 s,测回较差不超过5 cm,高程采用四等水准的方法测量,将检核点成果和点云成果导入Terrasolid软件,分别对采用不同间距靶标控制点纠正的数据成果进行统计分析。当靶标控制点间距为200 m时,纠正后的路面点云数据成果高程中误差为1.3 cm,平面位置中误差为3.9 cm,完全能够满足高速公路改扩建的精度要求。纠正处理后路面点云数据的误差分布如图5~6所示。
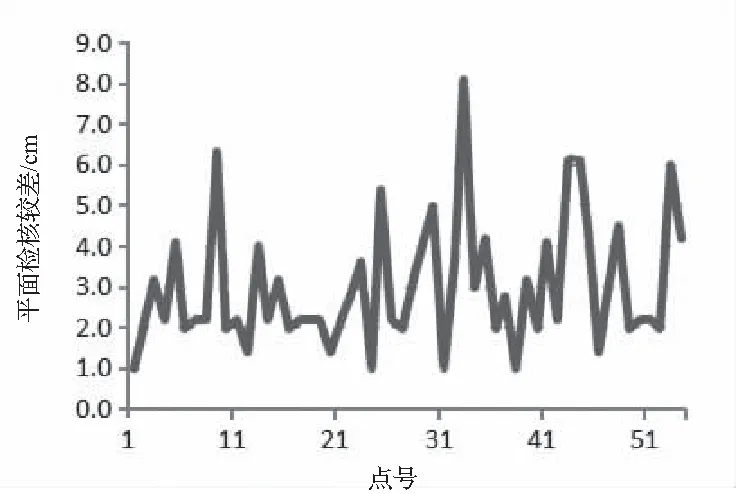
图5 点云平面误差

图6 点云高程误差分布
另外,分布采用100、200、300、400、500 m间距的靶标控制点间距纠正后的点云成果精度统计如表1所示。

表1 不同间距靶标点纠正后点云精度统计
从以上分析可知,靶标控制点间距越大,纠正后路面点云的精度越低,当靶标控制点间距小于300 m时,纠正后的数据能够满足精度要求,靶标控制点间距超过300 m时,纠正后的点云数据精度就难以满足要求了。所以,在保证成果精度的前提下,综合考虑可靠性和成本,地面靶标控制点布设间距建议采用200 m,个别布点困难的路段可适当放大距离,但不能超过300 m。
3 结束语
本文对基于车载LiDAR扫描技术的高速公路改扩建勘测的关键技术进行了研究,并结合具体工程项目论证了该技术应用于高速公路改扩建勘测的可行性,实现了高速公路既有路面数据的高精度、高效率获取,并得出了如下结论:
(1)与传统高速公路改扩建勘测方法相比,车载LiDAR扫描测量技术优势非常明显,不仅能够在不影响道路通行的前提下,快速获取既有路面数据,又保证了勘测人员的作业安全,必将成为未来同类项目的首选勘测手段。
(2)本文对不同间距靶标控制点的纠正方案进行了对比,得出了比较合理的地面靶标控制点布设方案,即靶标控制点间距宜控制在200 m左右,这样既能够满足精度要求,又能节约成本。
随着高新技术的不断发展和多学科融合的不断深入,LiDAR技术必将成为以后主流的勘测技术手段[11],并且其应用领域也会不断扩大,对推动测绘技术和勘测技术的发展具有深远的意义。
