结合光谱信息与空间特征的浅海光学遥感水深反演
2022-08-01戚甲伟滕东东
尹 飞 戚甲伟 滕东东
(山东科技大学 测绘与空间信息学院, 山东 青岛 266590)
0 引言
水深是海底地形测绘和海洋环境调查的基本要素之一。作为海洋与陆地或岛屿和珊瑚礁周围环境的相互作用区,浅水为海洋和沿海生态系统的可持续性和生物多样性提供了基本的物理环境[1]。传统的水深测量费时费力,且海上天气多变,浅海地形复杂,测量工作会受到影响。随着遥感技术的发展,越来越多的学者利用多光谱遥感图像的方法进行浅海水深测量。遥感方法可以进行大范围的同步测量,具有效率高、成本低的优点。对偏远水域以及海域争端地区,遥感技术可以作为传统测深技术的有效补充[2]。
使用遥感图像进行水深测绘的关键是建立图像像元值和实测水深值之间的数值关系[3]。Lyzenga等在不考虑水体内部反射效应的条件下,研究底质分类对水深反演的影响,建立水深与水体反射率之间的理论解析模型,是最早提出的理论解析模型[4]。由于模型中多种水体光学参数难以获取,限制了其实际应用。因此,Stumpf等提出了对数比值模型,可以在一定程度上消除复杂底质的影响[5]。但由于水体悬浮物质、海底底质等因素存在,使得水深和水体表面辐射亮度之间的线性关系并不总是成立。因此,水深反演的半经验半理论算法具有一定的局限性。
随着计算机领域的快速发展,机器学习算法在解决多变量、非线性复杂问题等方面具有出色的模拟能力。许多学者开始利用机器学习方法进行水深测量研究。温开祥等使用XGBoost、随机森林以及支持向量机的方法,利用Sentinel-2卫星数据,对梅州水库进行水深反演[6]。闫峰等对悬浮泥沙光谱特性进行分析,将“泥沙因子”作为BP(back propagation)神经网络的输入参数,构建的水深反演模型在一定程度上削弱了悬浮泥沙对遥感测深的影响,反演性能明显优于线性回归模型[7]。可见,选择适当的反演因子可以有效提高水深反演模型的精度。
海洋生态环境复杂,在生物活动和自然环境的影响下,海底底质类型往往是复杂多样的,与假设的均一理想条件差距很大,研究区域的底质带来的空间异质性会影响水深反演的精度。空间特征可以提高水深之间的空间自相关,结合光谱特征有助于提高水深反演的精度[3]。本文考虑到复杂底质带来的空间异质性问题,在光谱信息的基础上引入空间特征因子,用地理坐标表征空间特征,采用XGBoost算法与BP神经网络算法构建水深反演模型,降低了水深残差的空间聚集性,提高了模型的空间一致性,水深反演精度显著提高。
1 数据和方法
1.1 研究区域概况
甘泉岛(Robert Island)位于中国西沙群岛,北纬16°30′28″,东经111°35′10″,面积约为0.3 km2。由于远离大陆,受人为影响较小,大气条件良好,水质清澈透明,适合开展水深反演研究。研究区域的多光谱图像如图1所示。
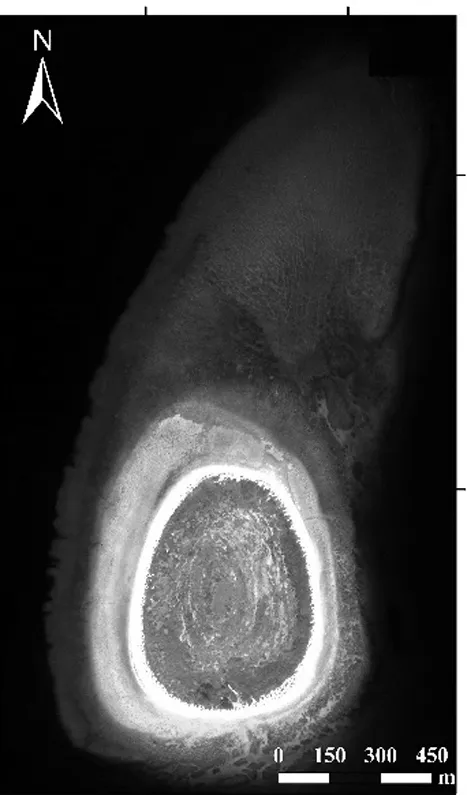
图1 研究区域的多光谱图像
1.2 数据介绍
本文使用的GeoEye-1卫星数据于2013年2月18日拍摄,其成像时的太阳天顶角为134.5°,卫星方位角为113.8°。属于L2A标准产品。影像基于WGS-84坐标系,通用横轴墨卡托投影(universal transverse Mercator,UTM)。有4个标准波段(蓝、绿、红、近红外)以及一个全色波段。卫星具体的参数如表1所示。
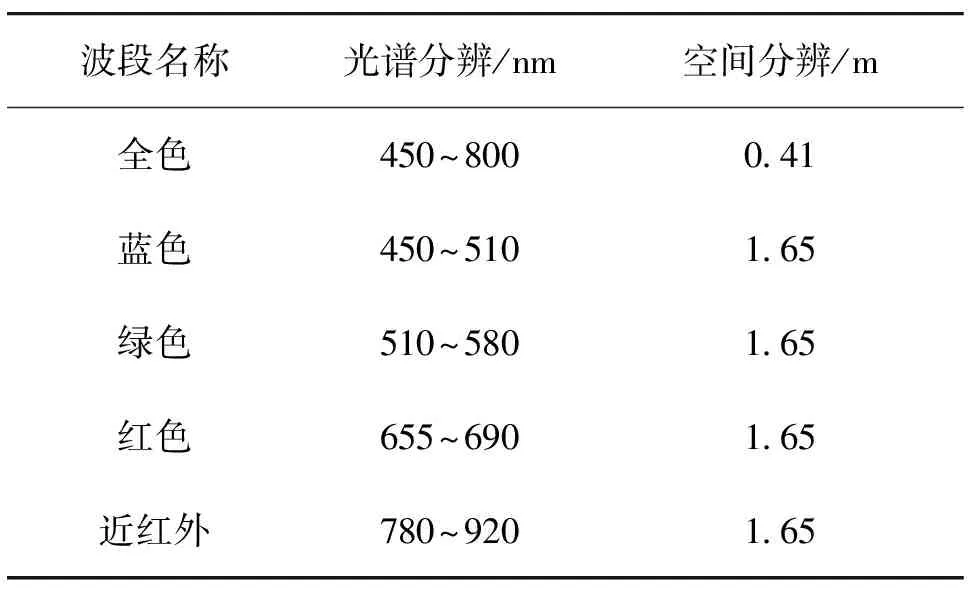
表1 GeoEye-1遥感影像参数
1.3 预处理
计算地物的光谱反射率时,要将图像无量纲的像元亮度值(digital number,DN)转化为具有实际意义的辐射亮度值。本文采用的是绝对辐射定标方法。精确的大气纠正对精确的测深至关重要,本文使用6S大气校正模型(second simulation of a satellite signal in the solar spectrum)来消除大气粒子、气溶胶以及分子的散射和吸收对水体信息提取的干扰,获得高度真实的地面辐射或反射[8]。
实测水深数据为2013年1月通过机载Optech Aquarius测深系统采集得到的激光雷达测深数据。其坐标系为2000国家大地坐标系(China Geodetic Coordinate System 2000,CGCS2000)坐标系,高斯-克吕格3°带投影,中央经线为111°E。通过解析激光雷达波形获得的水深对应于瞬时水深,需要利用潮汐数据对测深数据进行校正,以获得光学遥感图像采集时间的水深值[8]。通过查找潮汐表可以得到遥感影像成像时刻对应的瞬时潮高为0.91 m,则测量水深与潮高之和就是遥感影像的瞬时水深。
2 方法与原理
2.1 XGBoost模型
极限梯度提升算法, 即XGBoost(eXtreme Gradient Boosting)算法,是由陈天奇提出的基于Boosting思想的集成学习算法,其核心是基于梯度提升树实现的集成算法[9]。XGBoost采用多颗分类回归树(classification and regression tree,CART)进行预测,不断进行特征分裂生长成树。每次迭代过程中都会增加一棵树。把每次生成的树当作新函数,用来拟合上一次残差。各个叶节点的权重之和,即所需的预测值[10]。模型的目标函数Obj可以表示为
(1)

(2)
式中,γ为节点切分的难度;T表示叶子节点的个数;λ为L2正则化系数;ω为叶子节点向量的模。
通过多次实验对模型进行优化调参,参数取值如表2所示,其他参数缺省。

表2 XGBoost模型参数
2.2 BP神经网络模型
BP神经网络是应用最广泛的一种神经网络模型之一,它是一类基于误差逆向传播算法的多层前馈神经网络。BP神经网络理论上可以在结构合理、权值适当的情况下逼近任意非线性连续函数。它利用误差梯度下降算法使网络输出值与实际输出值之间的均方误差最小,因而在模拟水深反演这种非线性变化系统上,相比传统的统计方法具有更好的能力[11]。
本文采用3层BP神经网络结构,如图2所示,分别是输入层、隐含层、输出层。输入层中的神经元负责接收信息后传入到中间的神经元,神经元通过调整内部节点关系的连接,进而达到处理信息的目的。隐含层把处理完成后的信息再传入到输出层中。进一步处理数据后,输出水深值。通过反复训练,由表3可知,当隐含层节点数为6时,均方根误差最小。其他参数默认为缺省值。模型的参数设置具体如表4所示。

图2 BP神经网络结构图

表3 BP神经网络结构

表4 BP神经网络模型参数
2.3 空间特征因子
图3为波段反射率与水深相关性图,即使有相同的光谱辐射,图3(a)与3(b)蓝绿波段与水深相关性较好,而红波段在水深超过5 m,近红外波段超过2 m时,由于红光与近红外光不再以辐射传输方程指数衰减,他们与水深之间的相关性会变差。仅靠光谱特征不足以进行水深测量,因此有必要从遥感图像中提取其他特征。
由于海底底质分布上的不均匀性及其复杂性,会导致空间的异质性问题,影响模型反演水深的精度。空间特征在遥感影像上也是一个不可忽视的特征。引入空间特征可以有效地解决空间异质性问题[12]。地理坐标信息是最容易获得的空间特征信息,可以作为模型反演的因子来反演水深。

(a)蓝波段的水深
3 实验结果
本文共计提取了6 119个的水深样本点,每个水深样本点包含4个波段的反射率信息、实测水深值以及地理坐标信息。将提取的实测水深样本点按照7∶3比例随机划分为训练样本数据集和验证样本数据集。其中,训练集用于拟合模型参数来构建水深反演模型,验证集用于衡量模型的性能和反演精度。以决定系数(the coefficient of determination,R2),均方根误差(root mean squard error,RMSE)和平均绝对误差(mean absolute error,MAE)作为评价指标。

为验证空间特征信息对水深反演模型精度的影响,将空间特征与GeoEye-1遥感影像的蓝、绿、红、近红外4个波段反射率信息结合,共同作为水深反演因子,输入到建立的XGBoost与BP神经网络水深反演模型中,来对比分析模型水深值与实测水深之间的线性关系。图4为甘泉岛附近反演水深和实测深度的误差散点图,图中通过坐标原点且斜率为1的红色辅助线称为“1∶1”线,“1∶1”线上表示模型水深值等于实测水深值。空间特征模型相比波段反射率模型的验证点更均匀地分布在“1∶1”的两侧,表示其实测值与水深值基本吻合。
表5中,XGBoost和BP神经网络水深反演模型的决定系数为0.97时,说明模型水深与实际水深之间存在强相关性。以无空间特征的波段反射率模型为参考,空间特征模型RMSE明显优于波段反射率模型。其中,结合空间特征的XGboost水深反演模型的精度最高,其RMSE为0.90 m,较波段反射率模型减少了0.49 m。结合空间特征的BP神经网络模型RMSE从1.37 m降低到0.94 m。

表5 XGBoost与BP神经网络的反演精度对比表

(a)XGBoost波段反射率
为了更好地评估模型的性能,根据XGBoost与BP神经网络水深反演模型,绘制了甘泉岛浅海海域的全局水深图,如图5所示。其中,图5(d)是实测水深反演图。XGBoost与BP神经网络模型得到的水深反演结与实测水深的整体变化趋势大致保持一致。说明两个机器学习的模型反演水深的性能较好。
XGBoost模型在甘泉岛北侧的浅水区域,引入空间特征模型的水深反演结果相比以无空间特征的波段反射率为因子的模型,明显与实测水深更相近。而引入空间特征的BP神经网络模型,其在陆地周围区域比无空间特征的模型表现更佳。

(a)GeoEye-1遥感影像
4 讨论
4.1 空间特征因子对模型精度的影响
根据反演水深点的残差分布来体现空间特征因子对模型精度的影响。如图6所示,由于甘泉岛周围分布珊瑚与砂分布不均匀,导致预测的残差分布不均匀。仅使用波段反射率因子的模型大于4 m或小于-4 m的残差表现为聚集状态,可能是由于底质的差异导致。引入空间特征的两个模型,如图6(b)与6(d)所示,甘泉岛北侧浅水区域,XGBoost模型与BP神经网络模型精度提高显著,大于4 m或小于-4 m的(较大的红色和黄色圆点)残差和在区间-4~-2 m和2~4 m(较小的红色和黄色圆点)的残差点明显减少。引入空间特征因子反演得到的水深残差在-2~2 m的点(白色圆点)相比仅使用光谱信息的水深明显增多,正负的残差点均匀分布,表明引入空间特征因子可以提高水深反演的精度。

(a)XGBoost波段反射率残差图
5 结束语
本研究的主要目的是探究结合光谱信息的空间特征因子对XGBoost与BP神经网络模型的影响,探索其在水深反演中的潜力。考虑由于海底底质和水质变化导致的空间异质性问题,提出了将空间特征作为模型的输入量,与无空间特征的模型相比较。XGBoost与BP神经网络模型的R2从0.94提高到0.97, RMSE分别从1.39与1.37 m降低到0.90与0.94 m,降幅分别为25.3%与31.4%。引入空间特征的两个机器学习模型被赋予更高的空间一致性,降低了模型残差的空间聚集性,避免由于空间异质性导致的误差分布不均匀带来的问题,水深反演精度提升显著,为后续机器学习反演水深研究提供了有效的参考方向。尽管本研究区域仅限于甘泉岛,但这些方法被认为能够推广到世界其他珊瑚礁区域的有效参考。
