基于RobotStudio的工业机器人虚拟仿真实验平台设计及实现
2022-07-28刘海燕唐满宾
苏 宇,刘海燕,唐满宾
(广西科技大学,广西 柳州 545006)
0 引言
作为我国实施制造强国战略的第一个行动纲领,《中国制造2025》提出“人才为本”的基本方针。为了主动应对新一轮科技革命与产业变革,支撑服务创新驱动发展,2017年教育部积极推进“新工科”建设,全力探索中国模式下的工程教育经验,其中学生创新创业能力和技术技能能力的培养越来越受到人们的重视,其相关的实验教学资源建设也越发重要。[1-2]工业机器人技术是智能制造中一项核心技术,越来越多的高等院校开设了相关的专业、课程等。[3-5]但由于工业机器人属于一种较为昂贵的设备,地方高校,尤其西部地区的高校很难配备有完善的类似企业生产线中的工业机器人作业平台作为实验教学平台,其配备的工业机器人技术实验平台更多的是数量有限的工业机器人单机。此外,初学者较容易发生工业机器人误操作,尤其在配备了如工业相机等外设的实验平台上操作,容易导致工业机器人、外设受损。因此,结合数量有限的工业机器人实验平台开展虚实结合的实验教学很有必要。[6-7]本文主要结合笔者所在学校已有的ABB工业机器人工作站设备,设计相应的工业机器人技术虚拟仿真实验平台,以及开展相关的实验项目来展开研究。
1 设计思路
1.1 实验课程分析
工业机器人技术实验教学内容主要有工业机器人应用操作、工业机器人编程。“工业机器人应用操作”部分内容包括熟练掌握工业机器人的手动操作方法,理解工业机器人不同运动模式的区别,坐标数据与参考坐标系的关系,掌握搬运、码垛、焊接等不同作业下工业机器人的应用配置、通讯模块的配置等。[8-9]“工业机器人编程”实验课程的内容包括熟悉ABB工业机器人编程语言的语法、数据类型、常用指令,掌握模块化工业机器人编程的方法、了解不同工种作业下的编程等。
由于设备台套数有限,以笔者授课班级48人为例,每个实验项目一般5人一组,轮流使用一个实验平台,这导致在正常的每次实验课堂内,每名同学平均的实验时间不超过30分钟。这将导致学生在应用操作部分,仅能基本熟悉掌握示教器的使用等基本操作方法、通信配置、常见编程指令、编程实例等,对于运动模式的区别、坐标数据与参考坐标系的关系等需自行观察数据变化的实验,以及模块化编程等需要较长实验时间的实验,其实验效果总体不佳。另一方面,不同的生产作业工种,其工业机器人技术有较大区别,如信号配置、功能选项配置、专用功能函数等,现有的机器人设备很难配置齐全不同工种的功能模块以及相应外设。
基于现有实验室硬件资源以及实验教学效果,本文的工业机器人技术仿真实验平台及项目设计主要针对以上不足进行。
1.2 虚拟仿真实验平台模块开发
结合工业机器人技术实验教学的两大部分内容,虚拟仿真实验平台整体以三大模块进行设计,包括工业机器人的基本操作模拟模块、坐标系与末端工具位置数据理解模块、不同生产工种作业模拟模块。
1.2.1 工业机器人基本操作模拟模块
该模块主要包括两个子模块:示教器模拟仿真模块和写字模块。工业机器人的示教器是工业机器人与人机交互的主要部分,包括各种工业机器人操作、编程等都需要示教器实现。因此,示教器模拟仿真模块是整个平台的基础核心,ABB工业机器人的虚拟仿真运动、控制等核心的算法主要包含于此模块。[10]示教器模拟仿真模块主要是模拟真实的示教器操作界面,包括手动操作选项、ABB工业机器人控制摇杆等,通过此仿真模块,给学生提供进行示教器界面菜单认识、手动运动模式的选项设置、摇杆控制运动等认识验证类实验。该类实验要求学生在进入实验室进行工业机器人现场实验前完成,对工业机器人示教器界面菜单、手动操作方法等有一定认识后方可进行实物实验,以提高实验室内的课堂实验教学效果。
第二个子模块写字模块,为学生提供进行基础的示教编程、工业机器人运动应用实验以及轨迹离线编程实验等仿真平台。基于实验有趣性的目的,该模块属于开放性的模块,学生可自行设计自己的名字或者其他图形轨迹模型,加载到仿真模拟实验平台进行示教轨迹编程、自动获取轨迹编程等。[11-12]
1.2.2 理解工业机器人坐标系与末端工具位置数据模块
工业机器人其关键数据的构成及意义理解是学习好工业机器人编程的一个重要前提。该模块旨在给学生提供一个能便于观察不同坐标系下,不同类型位置数据的变化及变化规律,以及其他重要数据的实时变化过程的虚拟仿真平台。该模块包括一个固定坐标尺度模型平台以及实验数据显示模块。
1.2.3 生产应用模拟平台
常见的工业机器人应用主要有焊接作业、搬运作业、码垛作业、涂胶作业等,[13]在生产制造中,由于作业对象、生产工艺等有别,工业机器人的程序设计有较大的区别,如焊接机器人需使用焊接指令、准确的工具数据,搬运机器人作业程序需要严格遵循与外设信号逻辑顺序等。基于不同工业机器人应用场景,本工业机器人技术虚拟仿真实验平台在生产应用模拟模块设计立体仓库模拟模块、物料出库模拟模块、焊接作业变位模拟模块、传送带模拟模块、工具支架模拟模块、拓展模块六个子模块。
该模块主要为学生提供模块化编程、工业机器人综合应用技术等虚拟仿真模型环境。物料出库子模块模拟生产中的物料出库以及传输到工位;立体仓库仿真模块模拟生产中存放待加工工件立体仓库;焊接作业变位模拟模块模拟可变位的焊接工件夹装工位台架;传送带模拟模块模拟工件传送带;工具支架模拟模块模拟不同作业末端工具的支架;拓展模块主要由棋盘工件台及堆放平台组成,模拟搬运目的点位以及码垛工件存放格。
2 虚拟仿真实验平台实现方法介绍
2.1 虚拟仿真实验平台开发环境
虚拟仿真实验平台其中一个基本的原则是便于学生实验使用,即使在课外也能方便地进行自主实验,因此,本虚拟仿真实验平台是基于微软Windows操作系统环境下,利用计算机进行仿真实验。基于实验室现有工业机器人为载荷3公斤的ABBIRB120工业机器人,本虚拟仿真实验平台的开发以ABB公司RobotStudio编程软件为开发环境,其开发软件环境可快速搭建ABB工业机器人模型及控制系统,降低虚拟仿真平台的开发成本。应用场景模型利用三维设计软件Solidwork进行设计。
2.2 工业机器人基本操作模拟模块
基本操作模拟模块以RobotStudio编程软件快速搭建的IRB120工业机器人模型以及控制系统为原型,控制系统选项增加了DeviceNet Master/Slave、PROFINET Device两种常见的工业网络协议,以及Application Spot Welding工艺包选项。为结合现有工业机器人实验平台进行虚实结合实验教学,在仿真平台设计一个1795mm*1326mm规格实验台架模型。
写字模块属于开放模块,为方便初学者通过工具末端TCP点进行示教,设计了笔状末端,学生也可根据自己的兴趣爱好设计一个平面轨迹的模型加载到写字模块,以进行示教编程实验及自动获取轨迹编程(仿真实验界面见图1)。
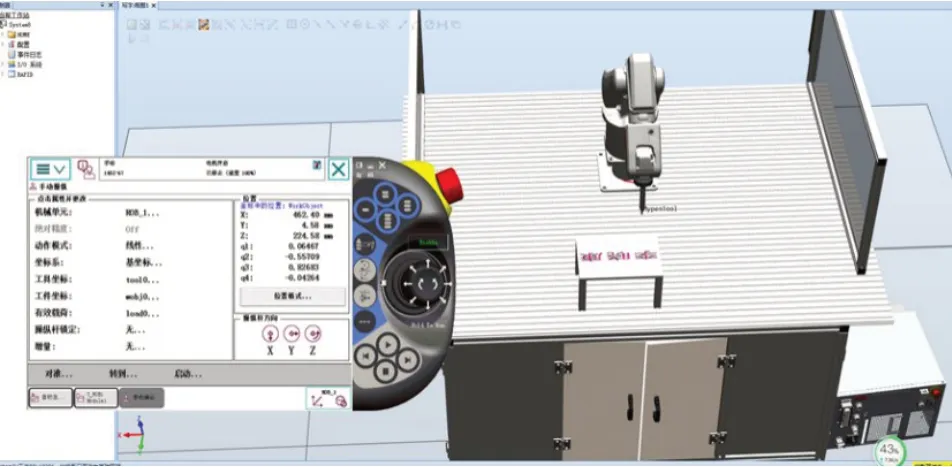
图1 虚拟仿真示教器手动操作界面及写字模块
在该仿真模块下,学生可进行常用的轨迹运动指令示教编程实验,理解不同运动指令以及每项相关参数的意义,也可根据仿真平台中的轨迹模型进行ABB机器人自动获取轨迹离线编程的实验(如图2所示)。
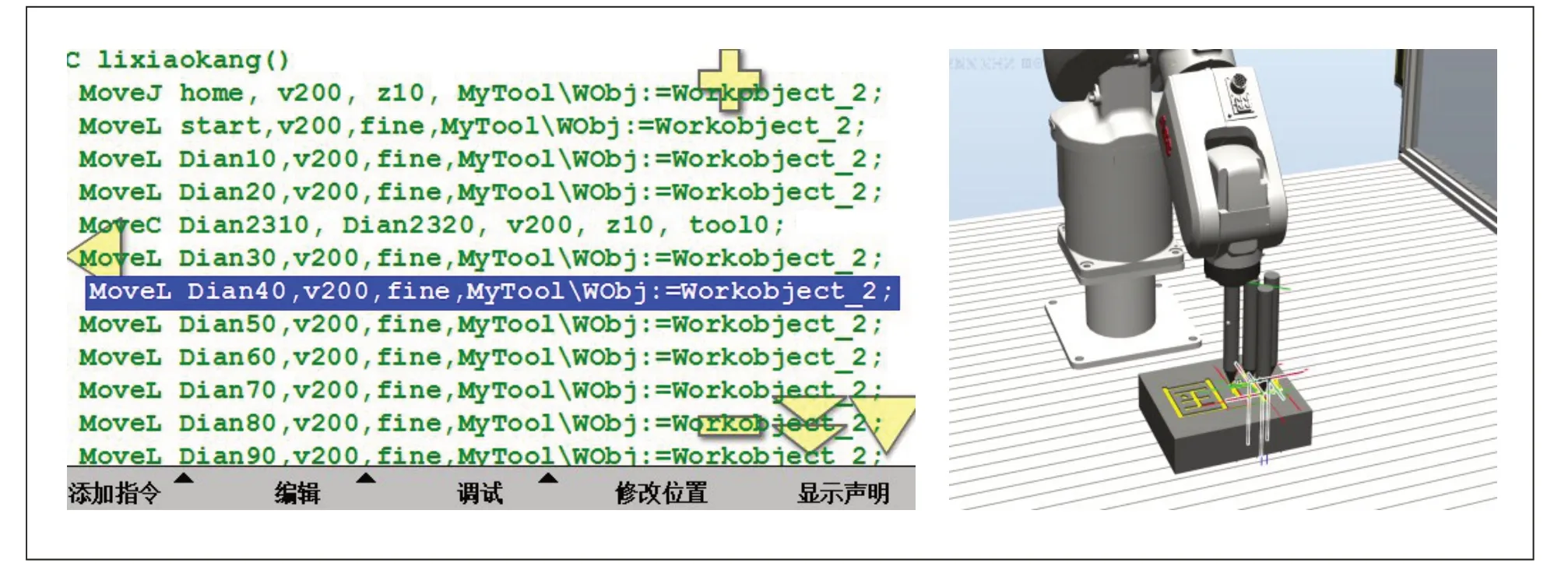
图2 运动指令编程、末端轨迹姿态仿真
2.3 工业机器人坐标系与末端工具位置数据理解模块
本模块主要设计一个类似棋盘有固定刻度线的工件模型,并利用ABB提供的软件工件开发包(SDK),利用软件开发平台Visual Studio2015及C#编程语言开发ABB工业机器人关键数据实时显示软件,在学生进行工件坐标系、工件坐标系的定义、不同类型位置数据定义等实验时,方便学生观察目标位置数据的变化规律,便于理解各种数据之间的关联与意义等。ABB工业机器人关键数据实时显示软件开发建立在软件与虚拟仿真实验平台后控制器的TCP/IP的连接,并获得数据读取权限,其部分关键代码如表1所示,仿真工具平台及数据实时显示软件界面如图3所示。
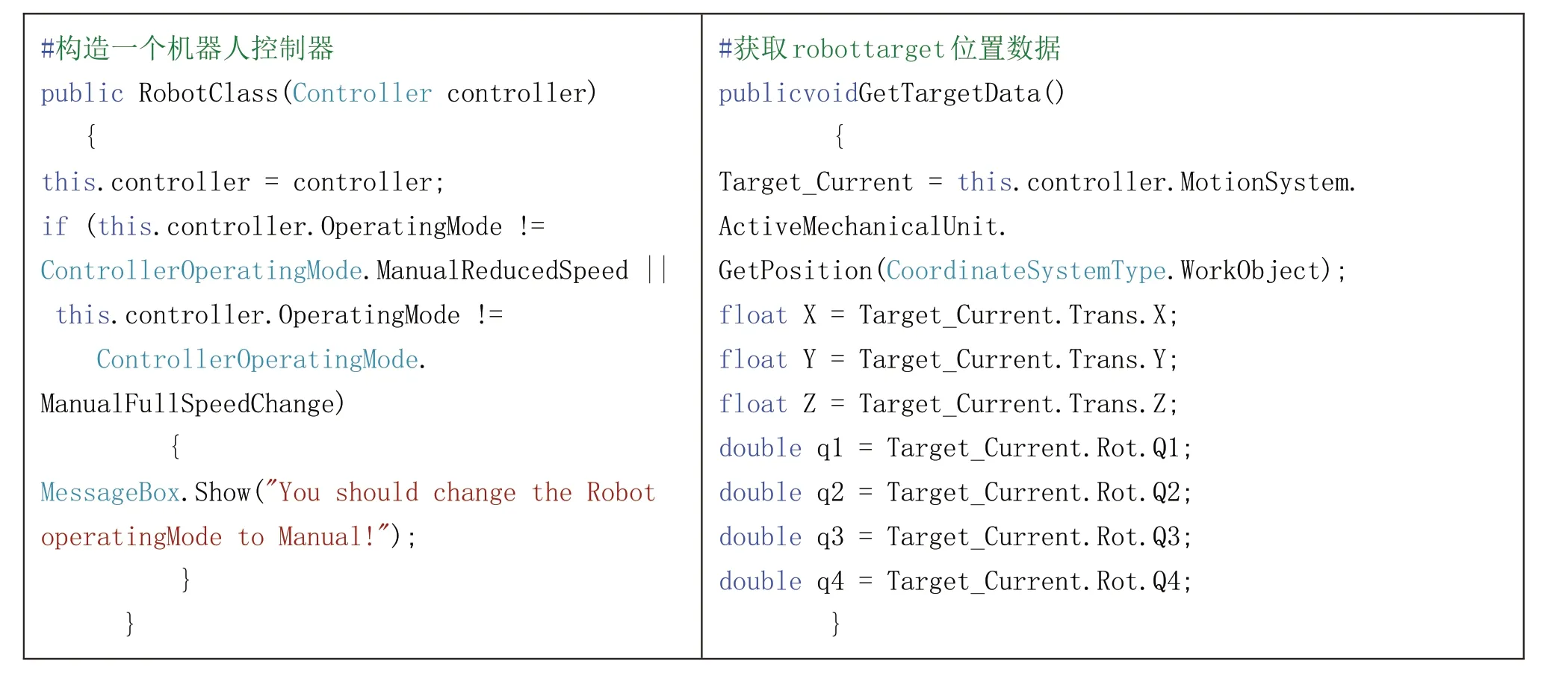
表1 Visual Studio软件部分代码
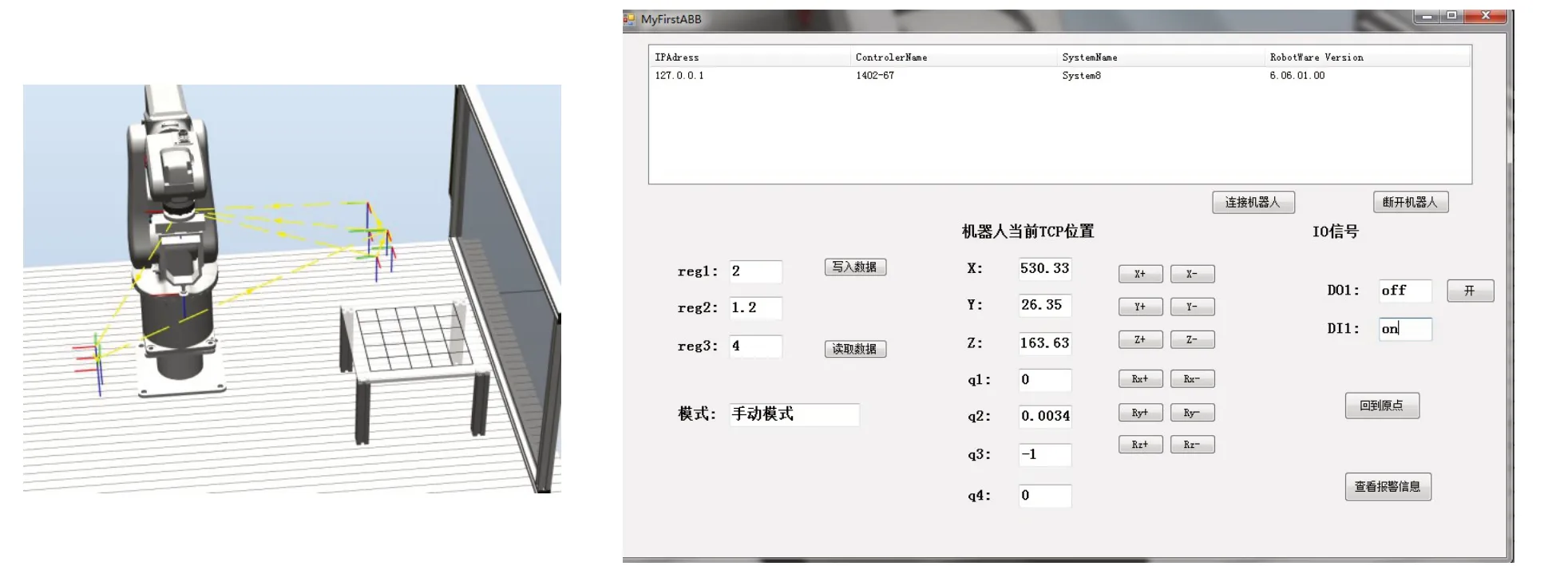
图3 仿真工具平台及数据实时显示软件界面
2.4 生产应用模拟平台
生产应用模拟仿真平台针对焊接作业、搬运、码垛三大常见工业机器人作业种类设计了六个三维仿真模拟模块:设计立体仓库模拟模块、物料出库模拟模块、焊接作业变位模拟模块、传送带模拟模块、工具支架模拟模块、拓展模块。其三维模拟模型利用Solidwork三维软件进行设计开发。焊接作业模拟实验要求学生能通过示教编程把模拟工件从模拟立体仓库模块中取出,并准确放置焊接作业变位模拟模块,进行焊接作业的工业机器人编程。搬运作业仿真模拟实验要求学生完成搬运工件自动取、放模块程序,根据物料出库模拟信号、工件传送带模拟模块到位信号完成搬运作业编程。码垛作业仿真模拟实验要求学生完成从拓展模块中取出工件,并根据码放要求把工件码放到棋盘模块的资产格子中。在生产应用模拟平台中,设计有4个末端工具及末端工具支架,不同的作业模拟实验需要完成取工具、完成具体作业、放工具三道工序,学生可根据作业的模拟工序进行模块化编程实验。
为实现工业机器人模拟仿真实验中的仿真动作效果,如在模拟搬运作业中,当工业机器人末端工件TCP点到达工件吸取位置,并执行吸取信号指令后,模拟工件应能吸附到工业机器人末端工具TCP上。根据以上设计的实验任务,本实验平台利用RobotStudio开发环境提供的Smart组件定义了模拟信号、仿真模型动作关联设计与开发(如图4)。生产应用模拟实验平台如图5所示。
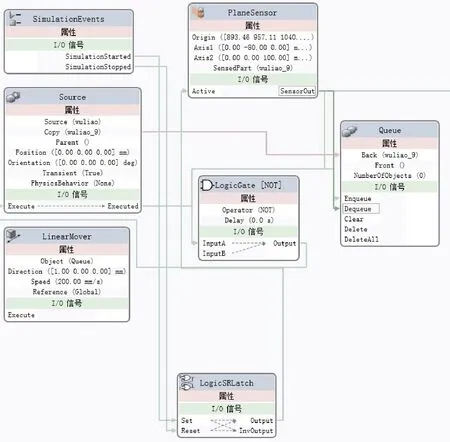
图4 搬运作业模拟仿真动作设计
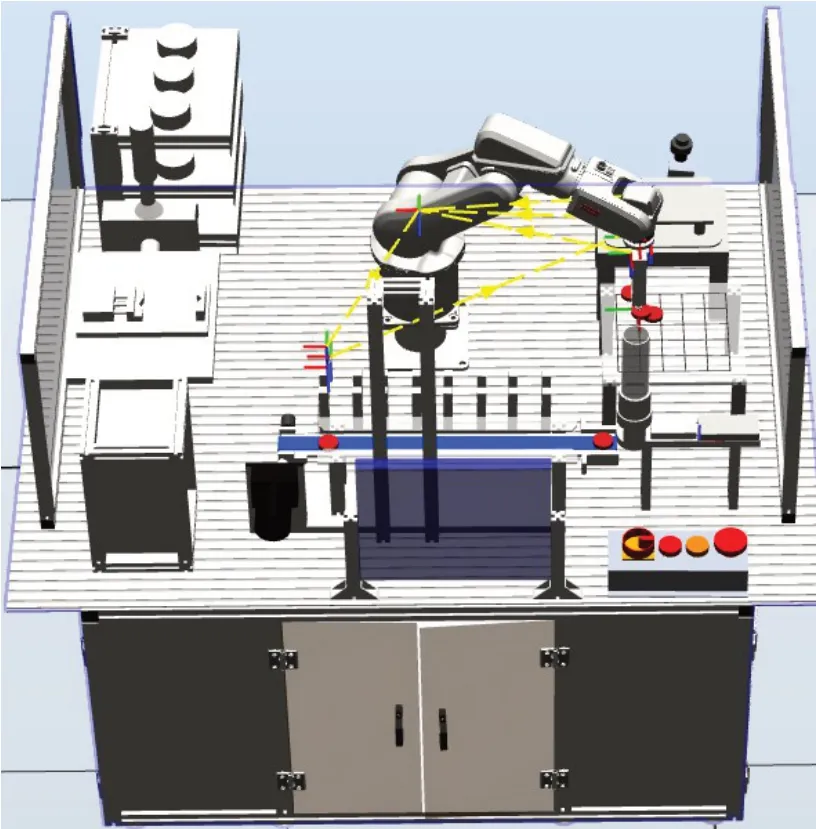
图5 生产应用模拟实验平台
3 结语
工业机器人虚拟仿真实验平台是基于现有工业机器人设备台套数不足,学生实验中误操作容易引起设备损坏,利用现有设备在进行编程实验时对关键数据结构及意义不易理解等背景下开发,其主要目的是根据工业机器人应用技术实验教学内容、实验课程目标等,开展虚实结合的实验教学活动。从已开展的相应教学活动效果分析,学生利用自己的计算机或实验室计算机进入虚拟仿真实验平台进行虚拟仿真实验,可帮助学生快速了解实验设备操作界面、方法,可直观地观察关键数据的变化等,帮助他们理解相关数据的结构及意义。不同应用模块的模拟帮助他们理解、掌握不同应用的机器人编程。此外,该虚拟仿真平台模块化的开放结构,为学生提供创新性、设计性的实验平台,例如,机械工程机器人方向的学生可结合已学的三维建模技术设计搭建机器人应用仿真场景,进行设计性综合实验。仿真实验平台基于实验室设备进行开发,因此,也可很好地支持虚实结合的实验教学模式。
