大型复杂网架结构扫描方案智能优化方法*
2022-07-27周斌科程国忠滕文正周翰东陈莎莎王瑞荣
周斌科 程国忠 滕文正 周翰东 王 聪 陈莎莎 刘 硕 王瑞荣
(1.中建铁路投资建设集团有限公司,北京 102601;2.重庆大学土木工程学院,重庆 400045)
网架结构是多根杆件按照一定规律的网格形式并通过焊接球或螺栓球连接形成的高次超静定结构。网架结构具有受力合理、刚度大、质量轻及抗震性能好等优势,被大量用作体育馆、展览厅、机场航站楼以及高铁站站房等大型民用基础设施的屋盖[1]。目前,竣工建筑信息模型(BIM)在施工管控、维修以及改造等方面得到越来越多的应用[2-4]。在施工管控方面,竣工BIM模型可以高效地对施工偏差或缺陷进行检测,同时可以实现施工进度智能统计等。在维修和改造方面,竣工BIM模型可以对维修或改造方案进行有效的评估,如碰撞检测、施工可行性等。目前,新建或已建网架结构的竣工BIM模型缺失严重,大大增加了施工管控、维修以及改造的成本。因此,亟需一套高效的网架结构逆向建模技术。
实现网架结构逆向建模的前提条件是高效的数据采集系统。目前,一项高效、准确的三维激光扫描技术正受到建筑业学者的青睐[5-7]。三维激光扫描仪通过主动发射激光束的方式来完成对目标点的测量,可以快速获得扫描环境内的全景三维点云数据,具有数据精度高、受外界影响小、可操作性强等优点,成为了建筑业逆向建模的首选。为得到网架结构的完整点云数据,通常需要三维激光扫描仪从不同方位对网架结构进行点云数据采集。目前,三维激光扫描仪站点的布置往往依赖于专业人员的知识、经验以及现场判断,这难以兼顾扫描对象完整性和扫描时间[8-9]。因此,现场扫描前需要制定相应的扫描方案,扫描方案主要包括三维激光扫描仪站点的布置(最优扫描站点集)、扫描路径以及标靶球布置三个方面的内容。最优的扫描方案是指以最少扫描站次采集完整的网架结构点云数据。针对扫描方案优化问题,国内外研究对象主要集中于竣工房屋,其中可视性分析均是基于二维CAD图纸开展[10-13]。大型复杂网架结构具有扫描对象多、空间遮挡严重等特点,导致现有研究成果不适用于大型复杂空间网架结构的扫描方案优化。
为此,本文以泸州高铁站房为工程背景,建立大型复杂网架结构扫描方案的优化模型,包括目标函数、约束条件、优化方法等;同时提出大型复杂网架结构扫描方案优化的成套方法;研究成果可为大型复杂网架结构逆向建模技术提供高效的数据采集方案。
1 工程概况
泸州高铁站(图1)位于四川省泸州市马潭区境内,总建筑面积39 998 m2,建筑高度40.2 m。泸州高铁站主要包括侧式站房和高架站房两部分,站房屋盖均采用大跨网架结构,侧式站房屋盖最大跨度为81 m,高架站房屋盖最大跨度为54 m,高架站房网架结构最高点到地面高度约为28 m。大跨网架结构中,圆杆均通过焊接球进行连接(图2),其中,圆杆数量多达7 800,圆杆平均直径约为300 mm;焊接球数量多达1 800,焊接球平均直径为700 mm。
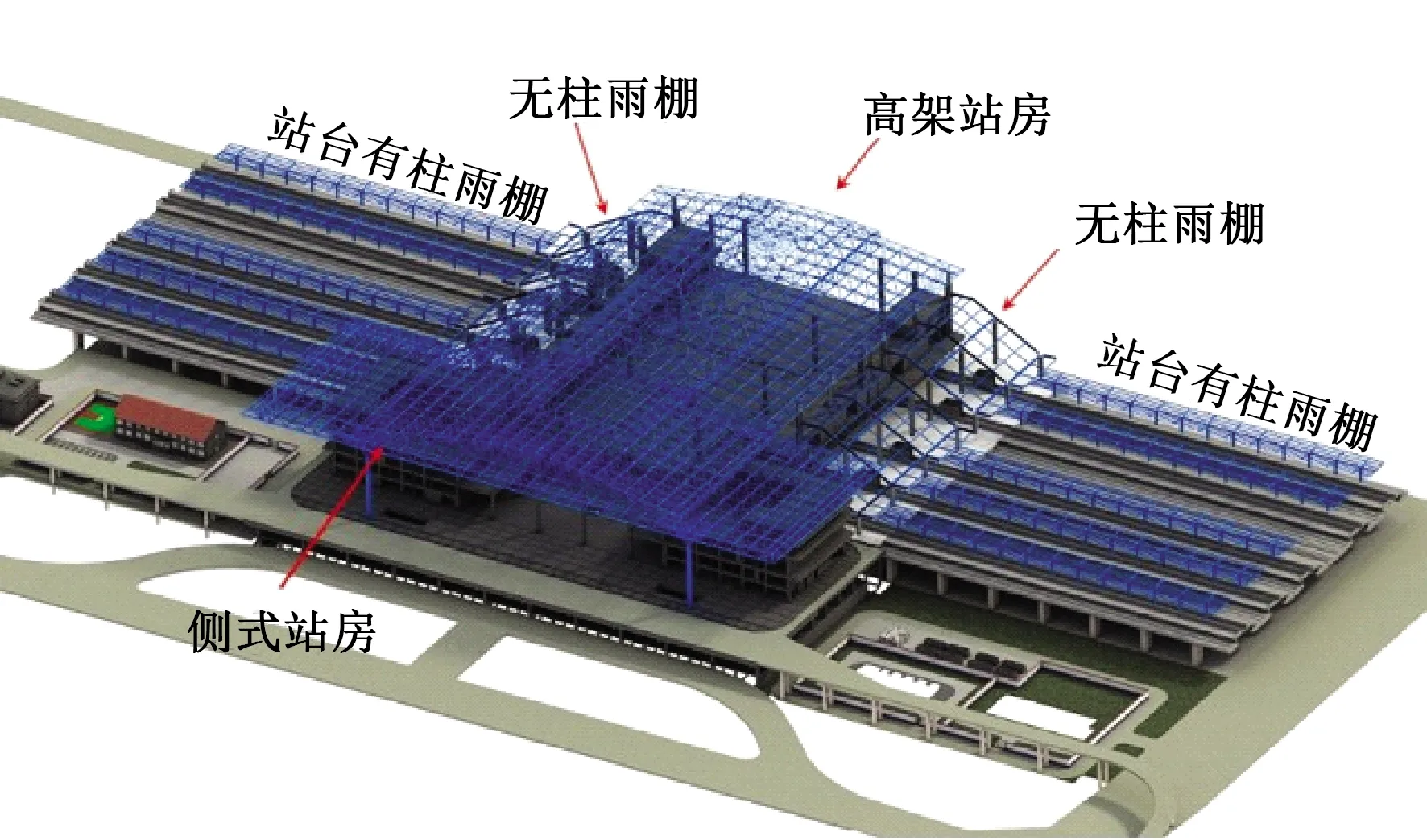
图1 泸州高铁站
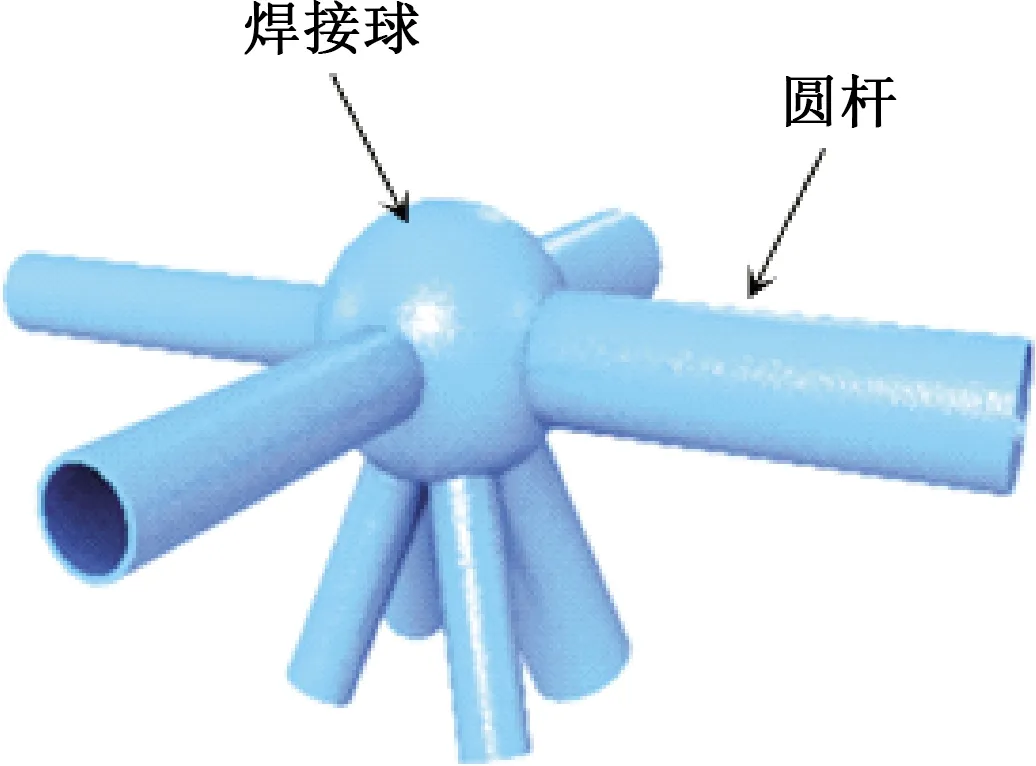
图2 典型节点
2 网架结构扫描方案优化模型
大型复杂网架结构扫描方案的优化模型包括目标函数、约束条件、优化方法等方面内容,以下将对优化模型进行详细阐述。
扫描方案优化模型的目标函数是以最少的扫描站点数保证扫描对象的点云数据达到预设覆盖率。大型复杂网架结构存在大量的杆件和焊接球,且构部件间遮挡严重,这大大提高了扫描方案优化的复杂度。考虑到焊接球的精准定位是杆件逆向建模的首要条件,为降低扫描方案优化的难度,仅焊接球被选作为扫描对象。
扫描方案优化模型的约束条件主要涉及点云数据可拼接性和焊接球可视性分析。为了保证各扫描站点获得的点云数据能够进行拼接,新增的扫描站点与已确定扫描站点集的重叠区域必须包括三个非共线的标靶球(图3)。标准的标靶球半径为72.5 mm,大大限制了三维激光扫描仪的长距离扫描能力。为此,提出用大直径焊接球代替小直径标靶球进行点云数据拼接的策略。焊接球可视性分析应考虑扫描距离、遮挡等因素,其中扫描距离是三维激光扫描仪能够高精度地识别焊接球的最远距离,当Faro S150型三维激光扫描仪的角分辨率为0.035°时,扫描距离宜取值为50 m;遮挡分析时,考虑杆件对焊接球的遮挡,同时也考虑焊接球之间的遮挡,杆件直径取值为300 mm,焊接球直径取值为700 mm。

图3 标靶球分布
目前,优化方法包括随机梯度法、牛顿法以及启发式方法等[14-16]。随机梯度法和牛顿法适合连续性优化问题,启发式方法适用于求解大规模性优化问题,优化方法和启发式算法均需要数学模型。考虑到扫描方案优化模型中的约束条件很难进行模型化,采用加权贪心算法寻找最优扫描站点集[9,17]。
3 网架结构扫描方案优化成套方法
网架结构扫描方案智能优化(图4)包括三个部分:1)数据提取,包含扫描对象集、遮挡物集以及候选扫描站点集;2)最优扫描站点集;3)最优扫描路径,涉及CAD/BIM二次开发技术、可视性分析、加权贪心算法以及蚁群算法等。
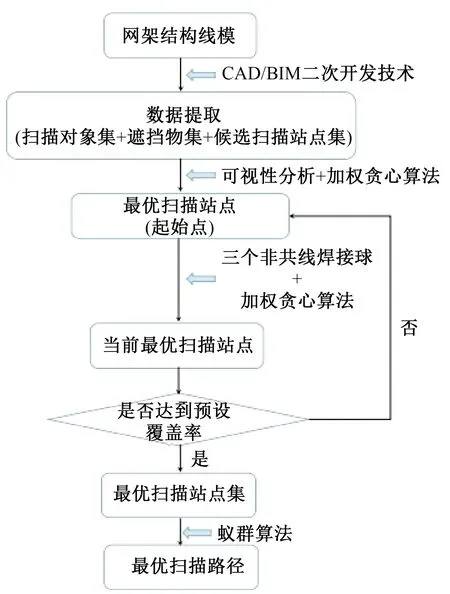
图4 网架结构扫描方案智能优化流程
3.1 数据提取
网架结构线模(图5)的包围框尺寸约为125 m×120 m×10 m。基于网架结构线模,通过CAD二次开发技术提取各线段端点的坐标值,所提取的端点坐标即为扫描对象集(图6)。各线段端点坐标成对保存,并赋予直径为300 mm的属性,表示杆件遮挡物集;各线段端点单独保存,并赋予直径为700 mm的属性,表示焊接球遮挡物集;基于BIM的API接口,可对遮挡物进行可视化处理(图7)。对网架结构正下方的地面进行网格化处理,网格间距为5 m,得到的网格点组成候选扫描站点集(图8)。扫描对象集、遮挡物集以及候选扫描站点集均以文本格式输入到算法中。
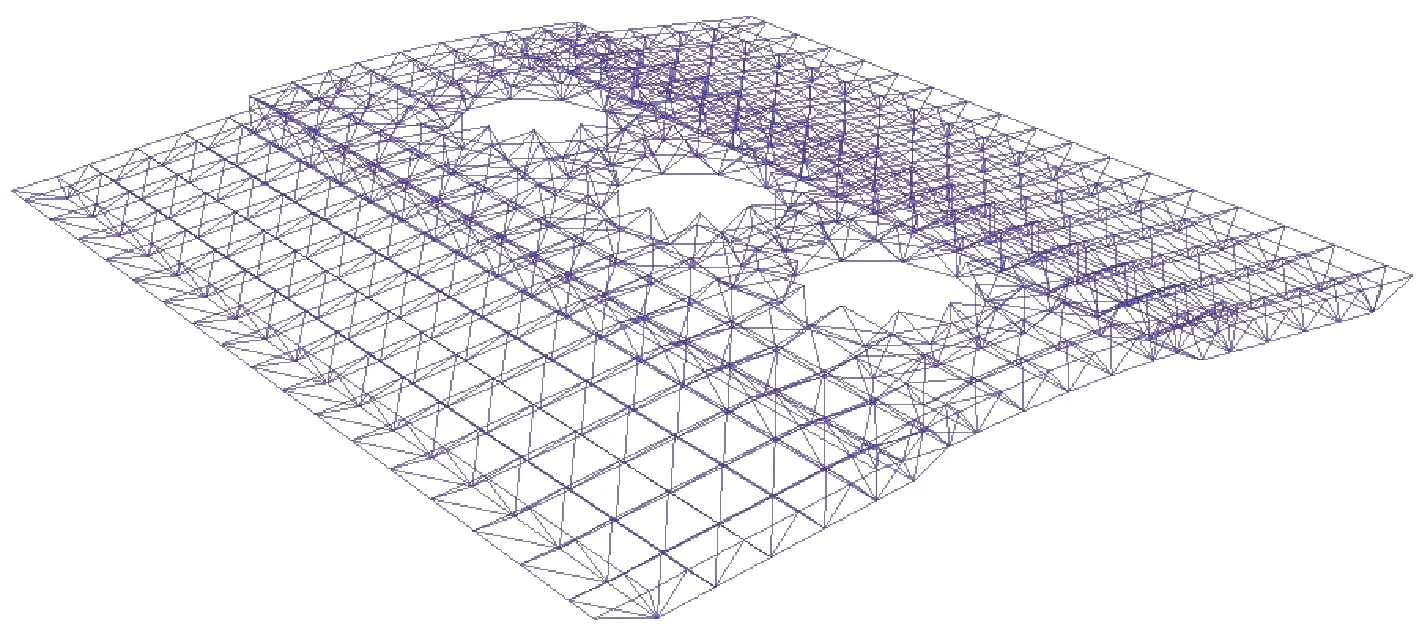
图5 网架结构线模
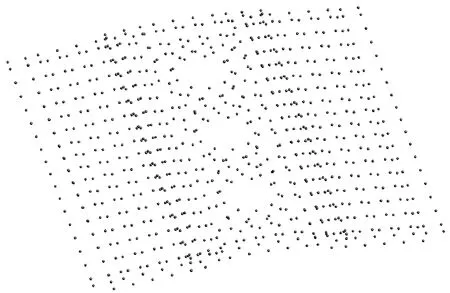
图6 扫描对象集

图7 遮挡物集
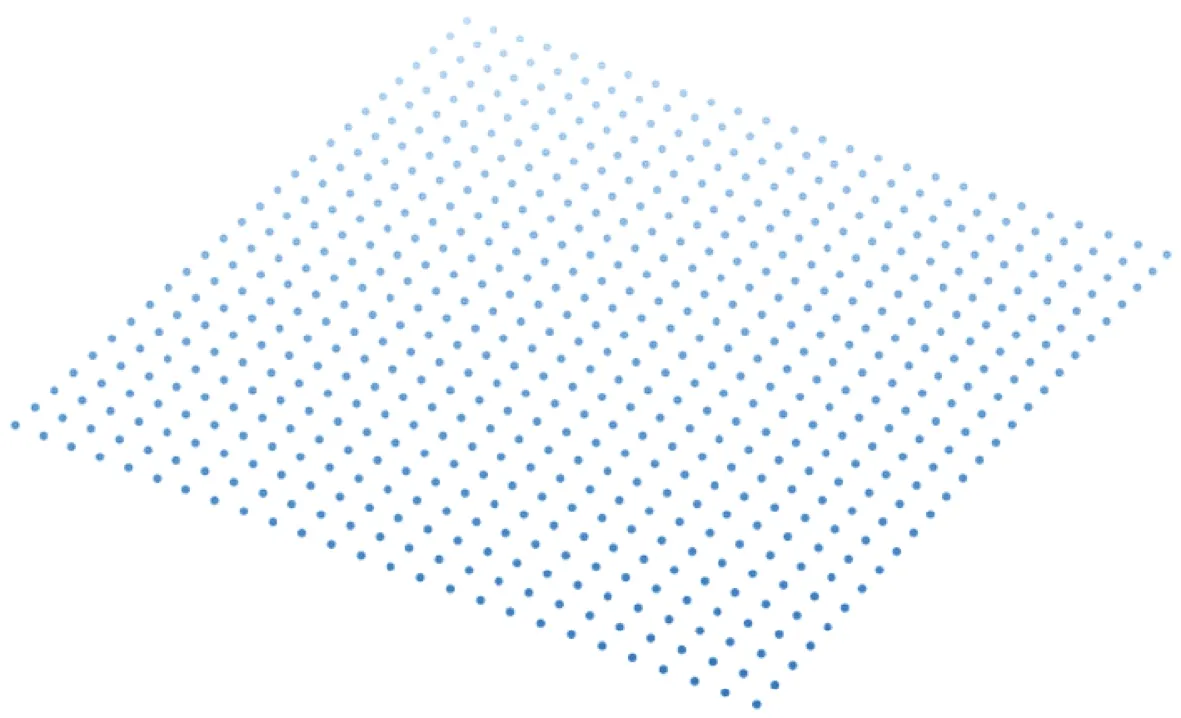
图8 候选扫描站点集
3.2 最优扫描站点集
3.2.1可视性分析
对各扫描站点进行可视性分析是确定最优扫描站点集的重要依据,可视性分析包括扫描距离筛选、杆件遮挡以及焊接球遮挡。扫描距离筛选是指扫描对象与候选扫描站点的直线距离应小于扫描距离。杆件遮挡分析时(图9),扫描对象B被杆件CD遮挡的判断条件为:
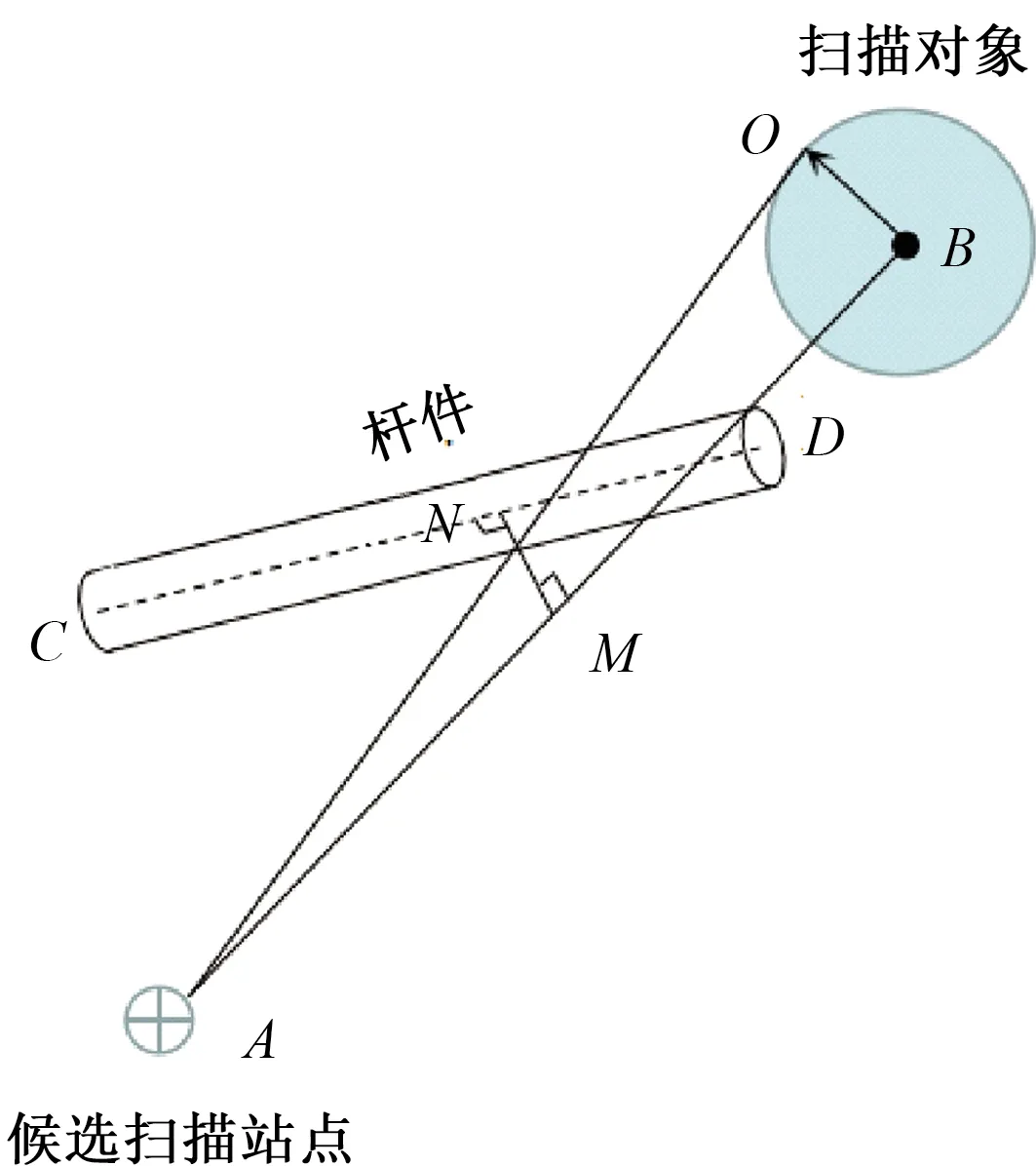
图9 杆件遮挡分析
(1a)
M∈AB&&N∈CD
(1b)
式中:MN为直线CD与直线AB的公垂线;rt为杆件半径,取150 mm;OB为焊接球半径,取350 mm;M∈AB表示点M在线段AB上;N∈CD表示点N在线段CD上。
焊接球遮挡分析时(图10),扫描对象B被焊接球遮挡的判断条件为:

图10 焊接球遮挡分析
(2a)
M∈AB
(2b)
式中:MN为焊接球球心N到直线AB的垂线;rb为焊接球半径,取350 mm。
图11给出了某个候选扫描站点的可视性分析结果。
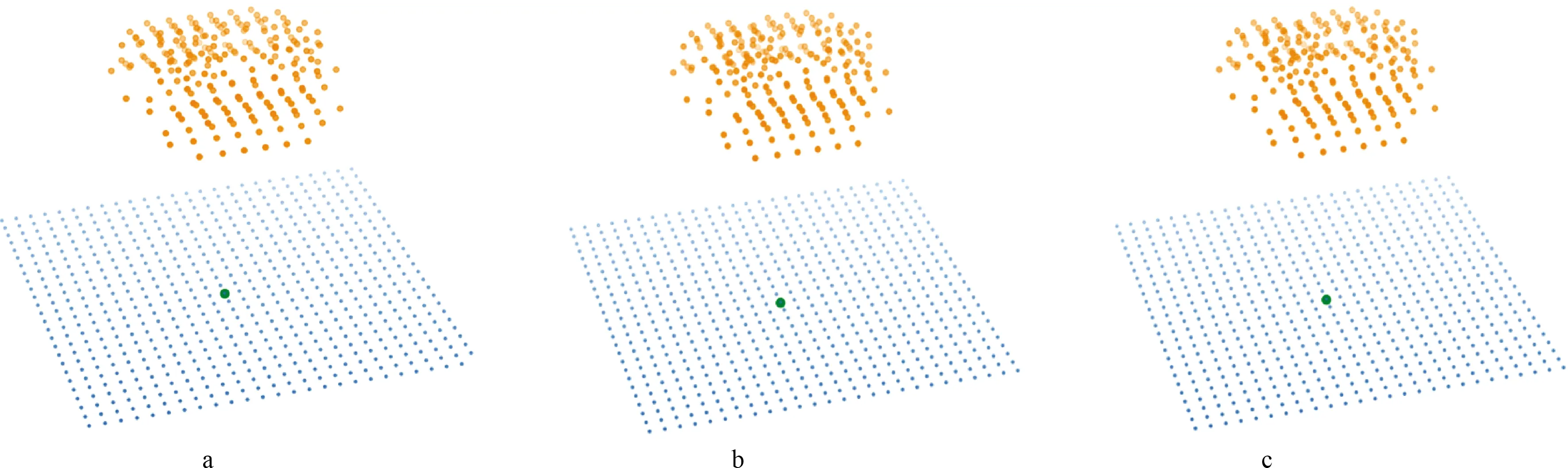
a—扫描距离筛选(可视焊接球数量:227);b—杆件遮挡筛选(可视焊接球数量:219);c—焊接球遮挡筛选(可视焊接球数量:219)。
3.2.2加权贪心算法
根据上述的可视性分析,确定候选扫描站点Si对扫描对象Tj的可视性指标Vij:
Vij={0,1}
(3)
式中:Vij取值为0,表示扫描对象Tj被候选扫描站点Si可视;Vij取值为1,表示扫描对象Tj不能被候选扫描站点Si可视;Si为候选扫描站点集{S}中任意元素;Tj为候扫描对象集{T}中任意元素。进而,扫描方案优化的数学模型可表示为简单的整数线性规划问题:
min{Si}
(4a)
(4b)
由于新增的扫描站点与已确定扫描站点集的重叠区域必须包括三个非共线的标靶球,很难进行模型化,故选用加权贪心算法对扫描方案进行优化。加权贪心算法是确定当前最优扫描站点的策略,具体步骤如下:
1)根据可视性指标Vij计算每个扫描对象的权重系数wj:
(5)
2)根据扫描对象的权重系数wj计算每个候选扫描站点的权重系数Wi:
(6)
3)选取最大的Wi相对应的Si,Si即为当前最优扫描站点,把Si添加到已确定扫描站点集{SS}中,把Si可视的Tj添加到已扫描对象集{TT}中,将Si可视的Tj对应的各项可视性指标重置为零。
4)从{S}中选取与{TT}有三个非共线焊接球的候选扫描站点集{ST}。
5)对{ST}重复步骤2)~4),直至满足预设覆盖率的条件。加权贪心算法对网架结构扫描方案进行优化的伪代码见表1,预设覆盖率为95%对应的{SS}见图12。

表1 加权贪心算法的伪代码
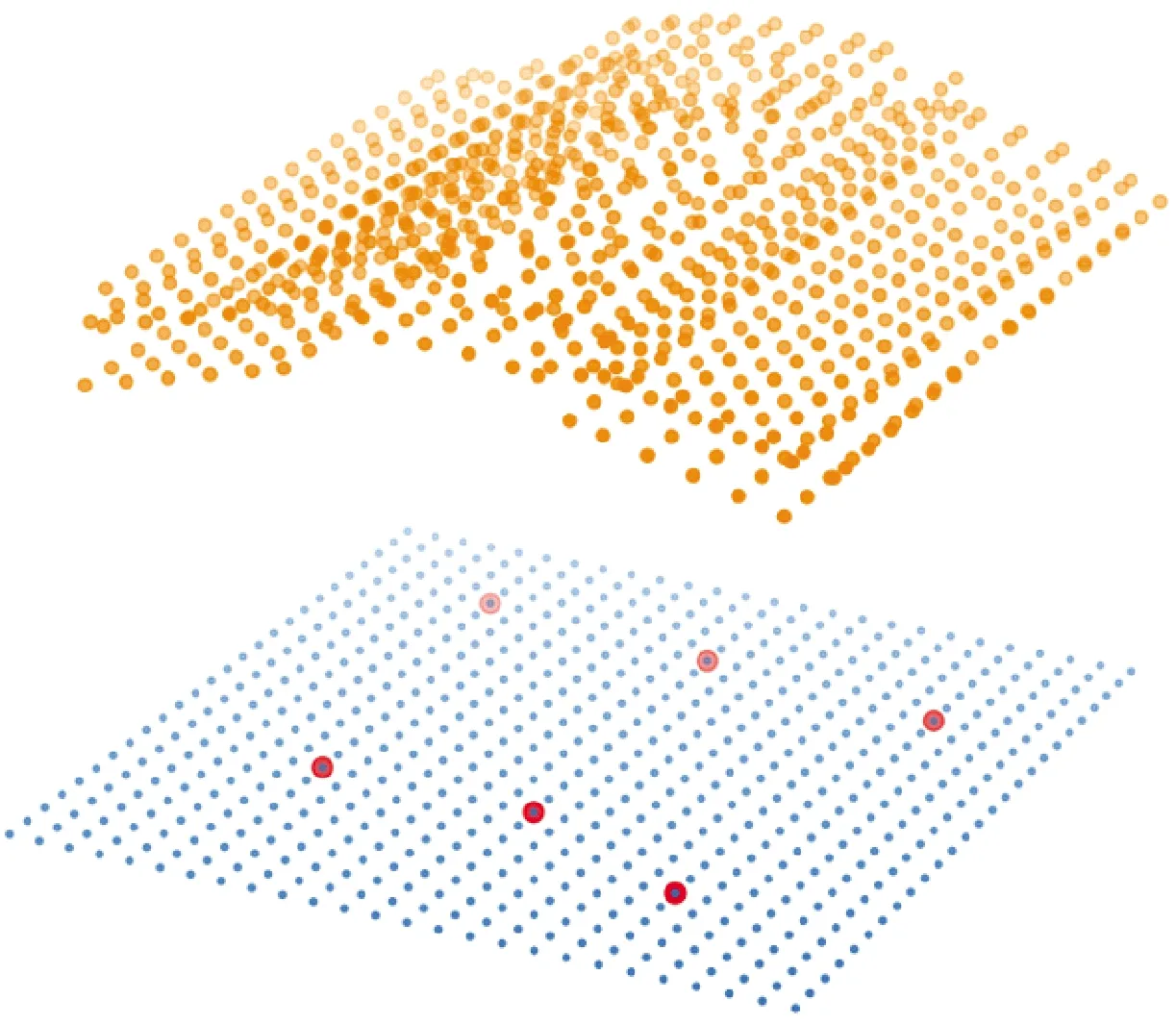
候选扫描站点集;选取的候选扫描站点;可视焊接球。
3.3 最优扫描路径

(7)
式中:α和β分别表示信息素τij和期望启发因子ηij的重要性程度,分别取值1.5和5;Jk(i)={1,2,…,n}-tabuk表示蚂蚁k下一步允许选择的最优扫描站点集;期望启发因子ηij可按式(8)进行计算:
(8)
式中:dij表示最优扫描站点Si与Sj之间的距离。
禁忌表tabuk记录了蚂蚁k当前走过的最优扫描站点集,当所有的最优扫描站点都加入了禁忌表tabuk时,蚂蚁k便完成了一次周游。当所有蚂蚁完成一次周游后,各路径上的信息素根据式(9)进行更新:
τij(t+n)=(1-ρ)τij(t)+Δτij
(9)
式中:ρ表示路径上信息素的蒸发系数;Δτij表示路径Si—Sj上信息素的增量,可按式(10)进行计算:
(10)

式中:Q为正常数;Lk为第k只蚂蚁所走过路径的长度。对于3.2节得到的{SS},采用上述的蚁群算法可寻找到最优的扫描路径,结果见图13。
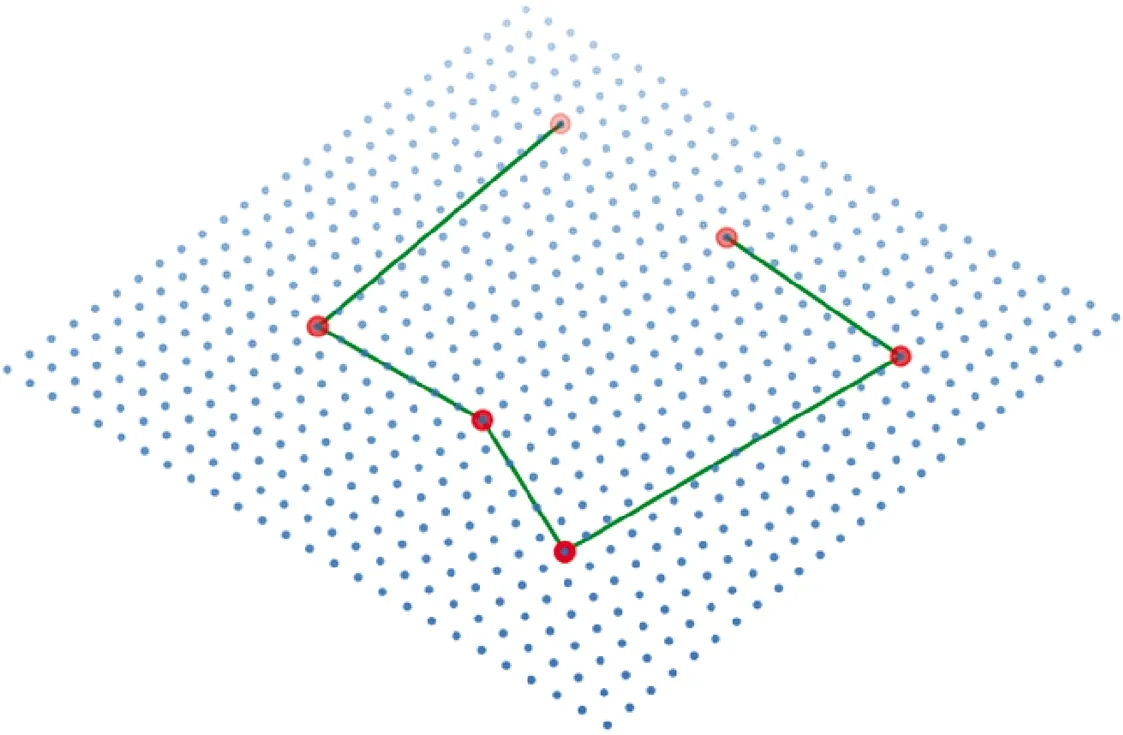
候选扫描站点集;最优候选扫描站点集;最优扫描路径。
4 工程应用
本文首次基于CAD/BIM二次开发技术、三维激光扫描技术、加权贪心算法以及蚁群算法等,提出了大型复杂网架结构扫描方案优化的成套方法,有效地解决了大型复杂网架结构扫描方案制定困难的问题。采用本文提出的网架结构扫描方案优化成套方法对包括3 290个杆件和836个焊接球的泸州高架站房屋盖进行扫描方案优化,扫描方案优化所需要的时间约为8 min,验证了网架结构扫描方案优化成套方法的高效性。
针对不同的预设覆盖率(70%,80%,90%,95%和100%),可得到不同的扫描方案(图14),扫描站点数与预设覆盖率的关系见图15。从图15可以看出:扫描站点数在预设覆盖率为95%时急剧增加,高架站房屋盖的预设覆盖率宜取95%。

a—预设覆盖率=70%;b—预设覆盖率=80%;c—预设覆盖率=90%;d—预设覆盖率=95%;e—预设覆盖率=100%。
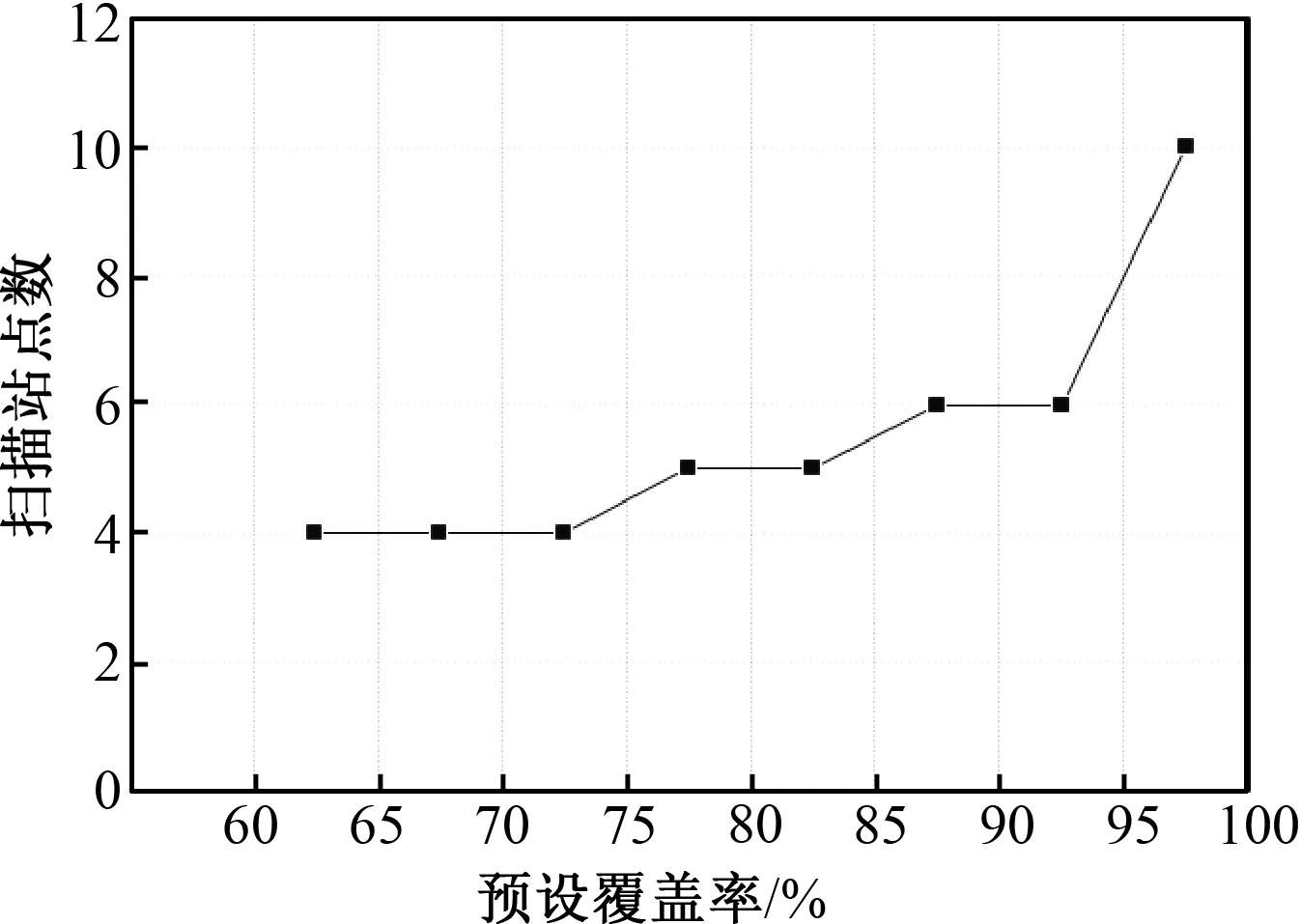
图15 扫描站点数与预设覆盖率的关系
5 结束语
1)基于CAD/BIM二次开发技术、三维激光扫描技术、加权贪心算法以及蚁群算法等,提出了大型复杂网架结构扫描方案优化的成套方法,有效地解决了大型复杂网架结构扫描方案制定困难的问题。
2)提出的大型复杂网架结构扫描方案优化成套方法高效、可行。
3)对于泸州高铁站的高架站房屋盖而言,预设覆盖率宜取95%。
