稀疏二阶注意力机制驱动的多尺度卷积遥感图像场景分类网络
2022-07-27倪康赵雨晴陈志
倪康,赵雨晴,陈志
(1 南京邮电大学 计算机学院,南京 210023)
(2 江苏省大数据安全与智能处理重点实验室,南京 210023)
(3 首都经济贸易大学 管理工程学院,北京 100070)
0 引言
遥感图像解译是遥感图像信息处理的关键内容之一[1-4]。随着遥感技术的不断发展,高分辨率遥感图像的数量和成像质量均得到了快速增长和提升,这使得传统基于人工目视的遥感图像解译工作不能够满足正常需求[5]。近年来,深度学习等相关理论知识的发展和应用,使得基于大规模数据量的遥感图像解译工作在解译速度和精度上均有明显提升。因此,遥感图像解译得到了国内外专家和学者的广泛关注。
遥感图像场景分类通过分析单幅高分辨率场景图像中的内容并赋予其相应的类别标签,是遥感图像解译的重要内容之一,现已广泛应用于交通管制、灾情预测等领域[6]。但由于场景图像地面目标的多样性和空间信息的复杂性使得对场景图像的场景内容理解极具挑战性。
近年来,深度学习理论的快速发展为高分辨率遥感图像场景分类提供了有效途径。相比于传统的基于手工设计的特征描述子,深度特征表述在特征鲁棒性和泛化性上的优势[7],使得基于深度学习的高分辨率遥感图像场景分类迅速成为遥感图像信息处理领域的研究热点之一。卷积神经网络(Convolutional Neural Networks,CNNs)在遥感图像场景分类领域取得了较优的分类效果[8]。目前,按照特征学习的方式,基于CNNs 的遥感图像场景分类方法可以分为:基于预训练CNNs 特征提取和基于端到端CNNs 特征学习的场景分类算法。
基于预训练CNNs 特征提取的遥感图像场景分类方法是一种将现有的ImageNet 等自然图像数据集上训练的深度神经网络作为特征提取器,提取遥感图像场景图像的深度特征,继而训练分类器,以完成场景分类。CHENG G 等[9]利用预训练的AlexNet、GoogleNet 和VGGNet-16 网络作为特征提取器,并将所提取到的特征向量作为视觉词袋模型(Bag of Visual Words,BoVW)的输入,以此提升其特征的可辨别性。为了利用多层网络的深度特征,HE N J 等[10]提出了一种多层堆叠的协方差池化网络(Multilayer Stacked Covariance Pooling,MSCP),该网络提取预训练的CNNs 网络中的多层深度特征向量,并采用协方差池化的方法进行获取其二阶特征统计信息,以此完成高分辨率遥感图像场景分类。为了充分顾及深度卷积特征中级特征表述和特征冗余对场景分类效果的影响,NI K 等[11]提出一种基于中级深度特征学习的遥感图像场景分类算法。该算法利用一种可学习的多层激励局部约束仿射子空间编码-卷积神经网络框架(Learnable Multilayer Energized Locality Constrained Affine Subspace Coding-Convolutional Neural Network,MELASC-CNN)进行深度特征学习。YANG Z 等[12]提出一种多尺度特征融合遥感图像场景分类算法,该算法通过输入不同尺度的遥感图像,提取预训练CNNs 中的卷积层与全连接层特征,继而进行特征降维操作,将降维后的特征向量输入多核支持向量机(Multi-Kernel Support Vector Machine,MKSVM)完成场景分类。上述算法仅仅将CNNs 作为特征提取器,利用特征降维、特征融合等算法提升深度特征的可判别性,以提高高分辨率遥感图像场景分类的准确率。但该类算法忽略了CNNs 的特征学习能力,故而限制了其在遥感图像场景分类精度上的提升空间及其泛化能力。
基于端到端CNNs 特征学习的场景分类算法突破了上述瓶颈,并取得了较好的场景分类效果。LU X Q等[13]在考虑深度特征聚合策略之后,提出一种卷积特征聚合编码网络,以此获取遥感场景图像的类别标签。该网络未顾及深度语义特征对遥感图像特征描述的影响,因此,LI R Y 等[14]在充分利用多级和多尺度深度特征的同时,将深度语义特征信息融入特征金字塔网络,以自动学习场景图像判别特征表述。上述网络可针对不同的深度特征向量进行端到端特征聚合,并可提升模型的泛化能力。为了增强深度特征的可辨别性,注意力机制的引入成为研究热点。
深度学习中的注意力机制可以有效且自动地进行特征选择,应用较为广泛的注意力模块有:SENet(Squeeze-and-Excitation Networks)[15]、CBAM(Convolutional Block Attention Module)[16]、GCNet[17]和ECANet(Efficient Channel Attention)[18]等。上述注意力机制模块在图像分类、目标检测等领域取得了较好的效果,但该类模块大多是情况下是利用深度特征的一阶特征统计量进行相关性学习,这种方式在一定程度上限制了其表述能力。因此,基于二阶统计量的注意力模块相继出现。GAO Z L 等[19]将全局二阶池化模块(Global Second-order Pooling,GSoP)嵌入卷积神经网络并得到不错的效果。BRYAN X 等[20]提出一种非局部二阶注意力网络(Second-order Non-local Attention Network,SONA-Net),该网络通过二阶特征统计量获取特征的长距离依赖。虽然上述基于二阶特征统计量的注意力模块在相关领域已取得较好的效果,但通过二阶统计量所得到的深度特征相关性的特征维度较高。例如:卷积特征向量X=RH×W×C,其二阶统计量特征维度为C2。因此,在不损害深度特征统计性能的情况下,约减特征维度至关重要。
综上所述,本文针对遥感场景图像地面目标尺度信息不同及场景图像复杂的空间分布和纹理信息导致基于CNNs 的场景分类算法分类效果欠佳的问题,从深度特征学习角度切入,提出一种稀疏二阶注意力机制驱动的多尺度卷积神经网络(Multi-scale Convolutional Neural Network Driven by Sparse Second-Order Attention Mechanism,MCNN-SSAM)。本文在主干网之后引入金字塔卷积以提取场景图像的多尺度深度特征,减弱遥感场景图像地面目标尺度信息不同对场景图像特征信息描述的影响;另外,引入稀疏二阶注意力模块对多尺度卷积中不同尺度卷积层的通道信息进行通道选择,以此提高深度特征向量的可判别性。
1 MCNN-SSAM 原理
1.1 MCNN-SSAM 网络架构
本文提出的MCNN-SSAM 包含以下几个部分:主干网、金字塔卷积模块、稀疏二阶注意力模块和Softmax 分类层,如图1所示。另外,为了更好地验证主干网卷积层特征提取效果,图2给出了不同网络层(VGG-M)所学习到的特征图可视化结果。
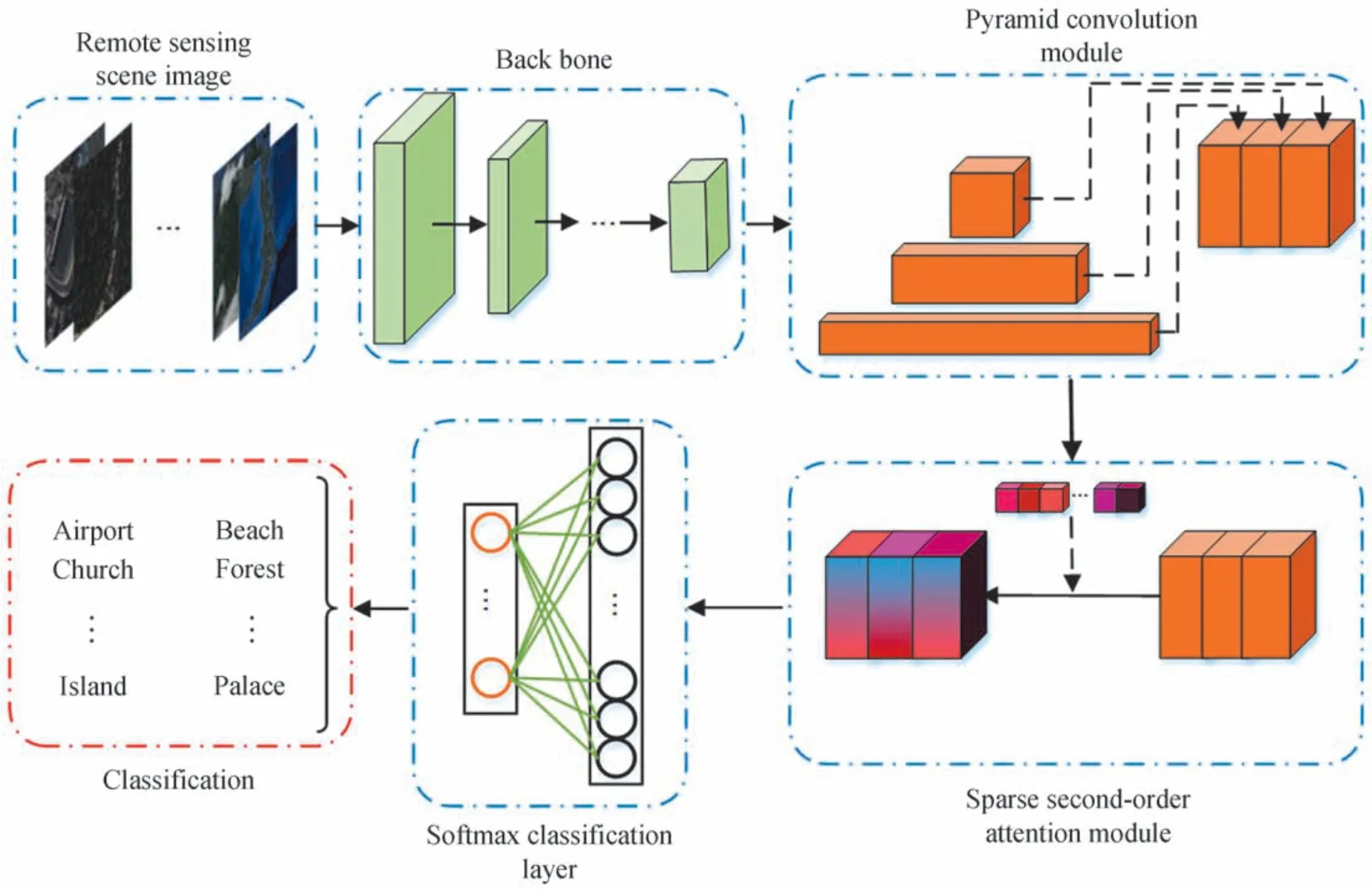
图1 MCNN-SSAM 网络结构图Fig.1 The architecture of MCNN-SSAM
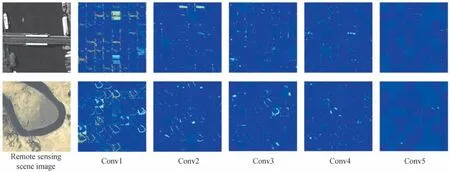
图2 不同网络层所学习到的特征图可视化结果Fig.2 Visualization results of feature maps learned by different network layers
从图1可以看出:浅层的卷积层(如Conv1)所得到特征图的特征激活区域较广,部分通道的特征图刻画不精确,例如:在桥梁场景图像中,部分特征图关注在水域等区域,忽略了桥梁区域;另外,浅层卷积层特征图大多表现为边缘、轮廓等特征信息;随着网络层数的加深,特征图激活区域更加稀疏,特征也表现的更加抽象,且具有更高层的语义信息,例如在河流场景图像中,河流边缘、轮廓等特征信息逐渐稀疏,Conv5 所提取的特征图激活区域少且集中,特征表现形式更加抽象,更具可辨别性。因此,本文截取VGG-16 最后一个卷积层(Conv5_3)之前所有的网络层作为主干网。另外,金字塔卷积中包含三个不同尺度的卷积操作,稀疏二阶注意力模块可自动学习不同尺度卷积层的通道信息并进行通道选择,最后嵌入Softmax 分类层完成网络的端到端训练。下文将详细阐述所提网络的各个部分。
1.2 金字塔卷积模块
金字塔卷积网络结构块采用3 个级别的卷积并联而成。每个卷积都有四个参数(h,w,c,g),分别代表卷积核的高、宽、通道数和组卷积中组的数目[21]。这里,卷积核的高和宽设置为[3,5,7],即h1=w1=3,h2=w2=5,h3=w3=7,每一级卷积核的通道数均相等(按照经典CNNs 通道数目的设置,c通常设置为2的指数幂,本文中c=512)。为了保证不同卷积所得到的特征图大小相同,该结构块中步长(stride)均设置为1,填充(padding)设置为h//2,//为整数除法,返回不大于结果的一个最大的整数。这样通过卷积输出特征图的计算公式,即可得到同等大小的特征图输出。
另外,经典卷积操作的参数量和计算量均来自于卷积核计算。假设输入特征图通道数为cin,输出特征图通道数为cout,输出特征图大小为[H,W],卷积核大小为k,则参数量大小P与浮点数计算量F为

在输出特征图保持一致的情况下,因卷积核大小的不同,与单尺度卷积层相比,金字塔卷积网络结构块的参数量和计算量明显提高。为了降低金字塔卷积网络结构块的参数量和计算量,考虑到经典卷积操作中,卷积操作针对每个通道的特征图都进行类似于全连接计算方式的特征图卷积,这种计算方式直接影响了卷积核的参数量与计算量。金字塔卷积网络结构块按照通道数目进行分组,再进行卷积操作,这样每个分组内的特征图进行独立的卷积操作,模块的参数量和计算量都会随着cin和cout的降低而明显降低。若分组数目g=1,即演变为经典的卷积操作,但分组数目过多也会影响到特征学习的效果[21]。金字塔卷积网络结构块中g1、g2和g3拟选定为相等的参数,另外根据CNNs 通道数的设置,将其设置为2 的指数幂,本文设置为4。最后,通过BN(Batch Normalization)层和ReLU(Rectified Linear Unit)非线性激活层对输出特征图进行非线性建模,增加模型的表达能力和特征泛化能力,降低网络过拟合现象的发生。
1.3 稀疏二阶注意力模块
本文所提出的稀疏二阶注意力模块结构图如图3所示。对于金字塔卷积模块的输出特征图G∈RH×W×C,利用1×1 卷积层进行通道降维,可得其降维的特征图为H×W×C'。继而利用FBC 模块(Factorized bilinear coding)进行稀疏二阶统计量的计算。
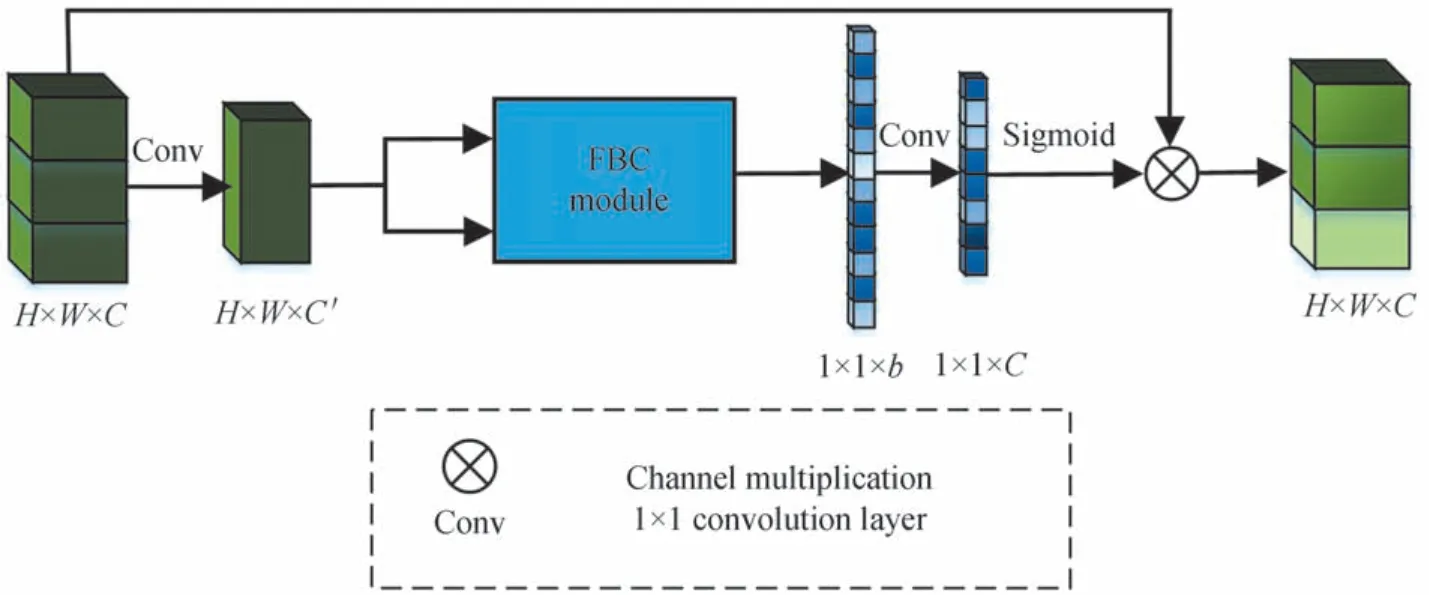
图3 稀疏二阶注意力模块结构图Fig.3 The architecture of sparse second-order attention module
FBC 模块的核心思想是从深度特征向量特征对(mi,nj)中学习到一个具有b个原子的字典A,其中每一个原子均可以分解为低秩矩阵XlYlT[22]。此时,编码系数cs可通过式(2)计算。

式中,ω为可调参数,s=1,2,...,C,‖ • ‖1为l1范数算子,cls表示编码系数的第l个元素。Xl∈Rp×v,YlT∈Rv×q,q是超参数,且v≪p。从式(2)可以看出,FBC 模块可以通过LASSO(Least Absolute Shrinkage and Selection Operator)算法求解,即

式中,cs'=为Hadamard 积,且Q∈Rb×vb为固定的二值矩阵,X'和Y'是通过低秩矩阵X和Y计算得到的,其目的是为了降低运算复杂度。这里,X'和Y'表示为

式中,1Tvb和I为全1 向量和矩阵[23],pl为P的第l列,其中P定义为

通过上述求解,利用FBC 模块求得的稀疏二阶注意力特征向量可以表示为

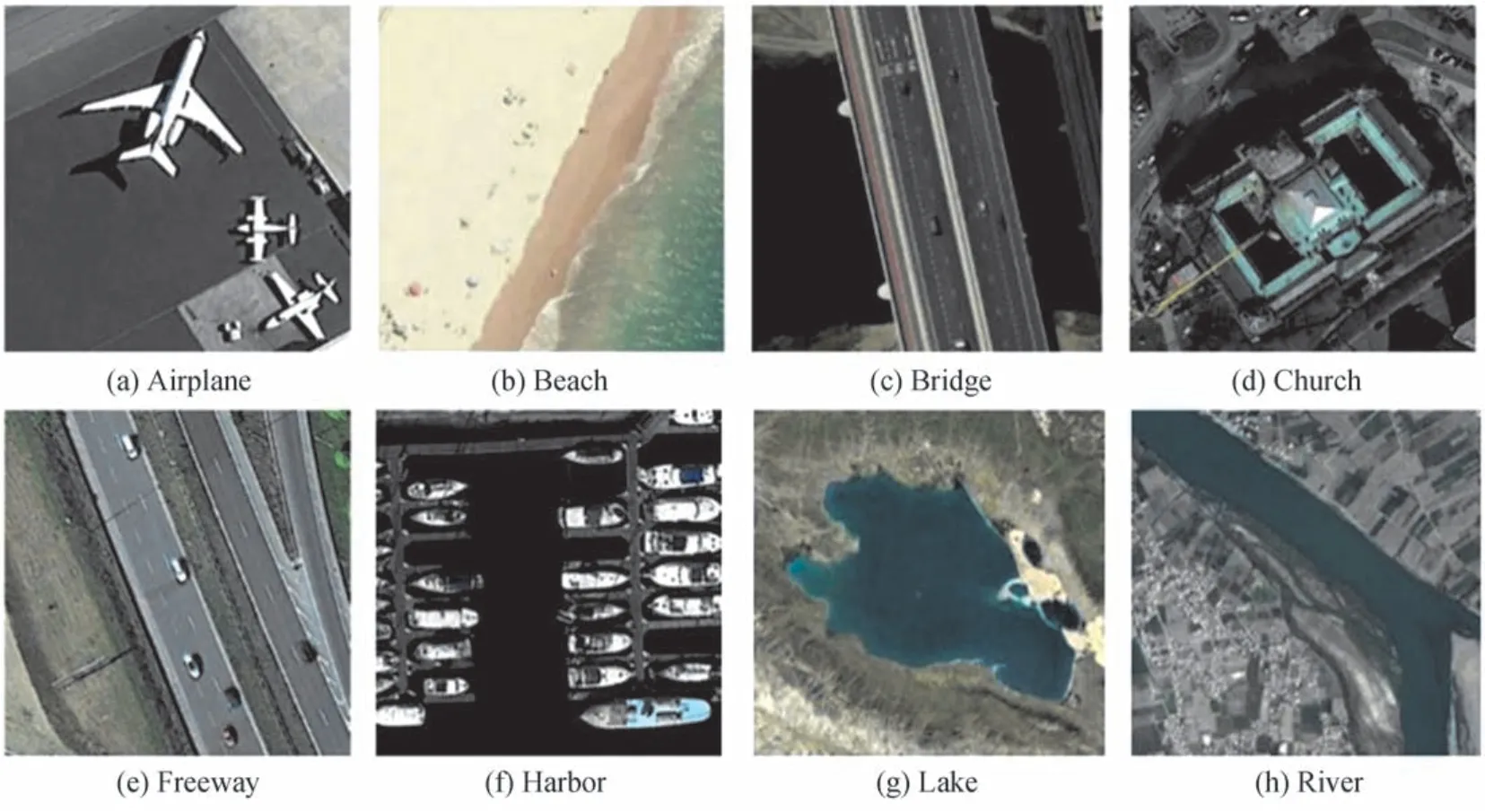
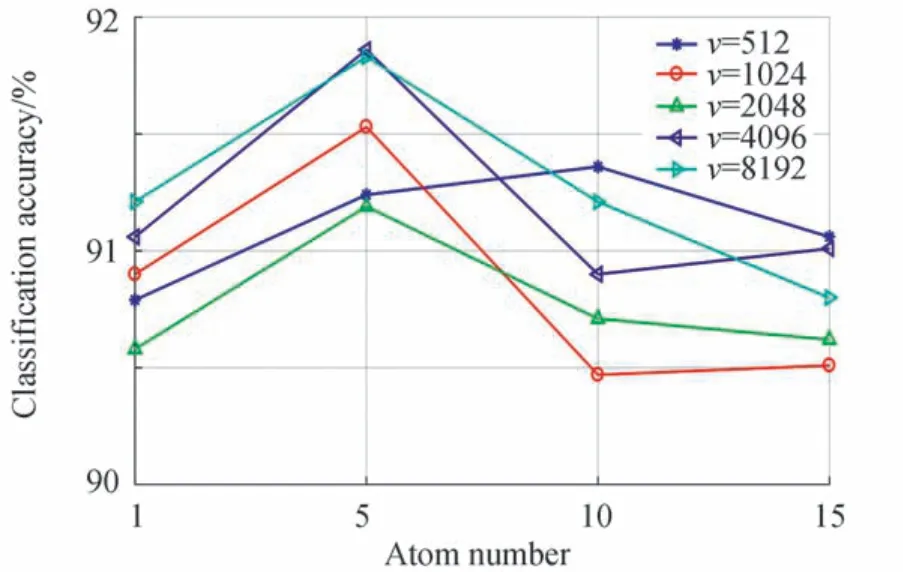
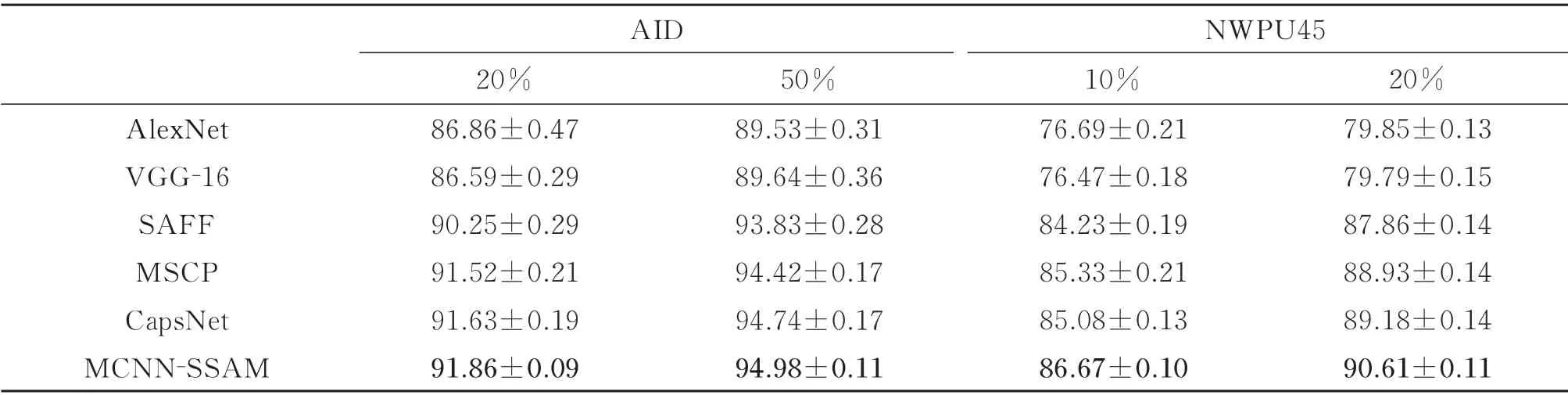
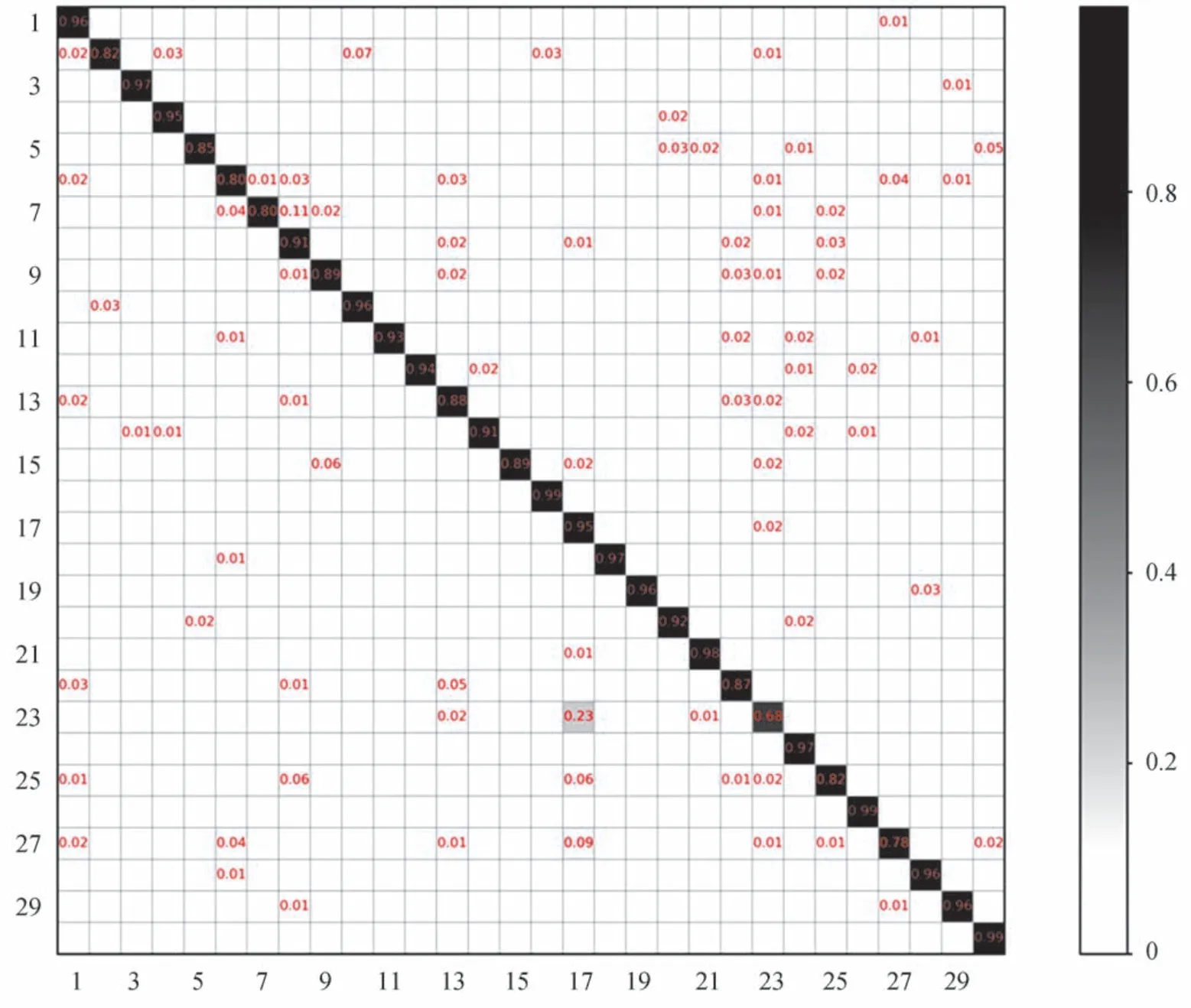
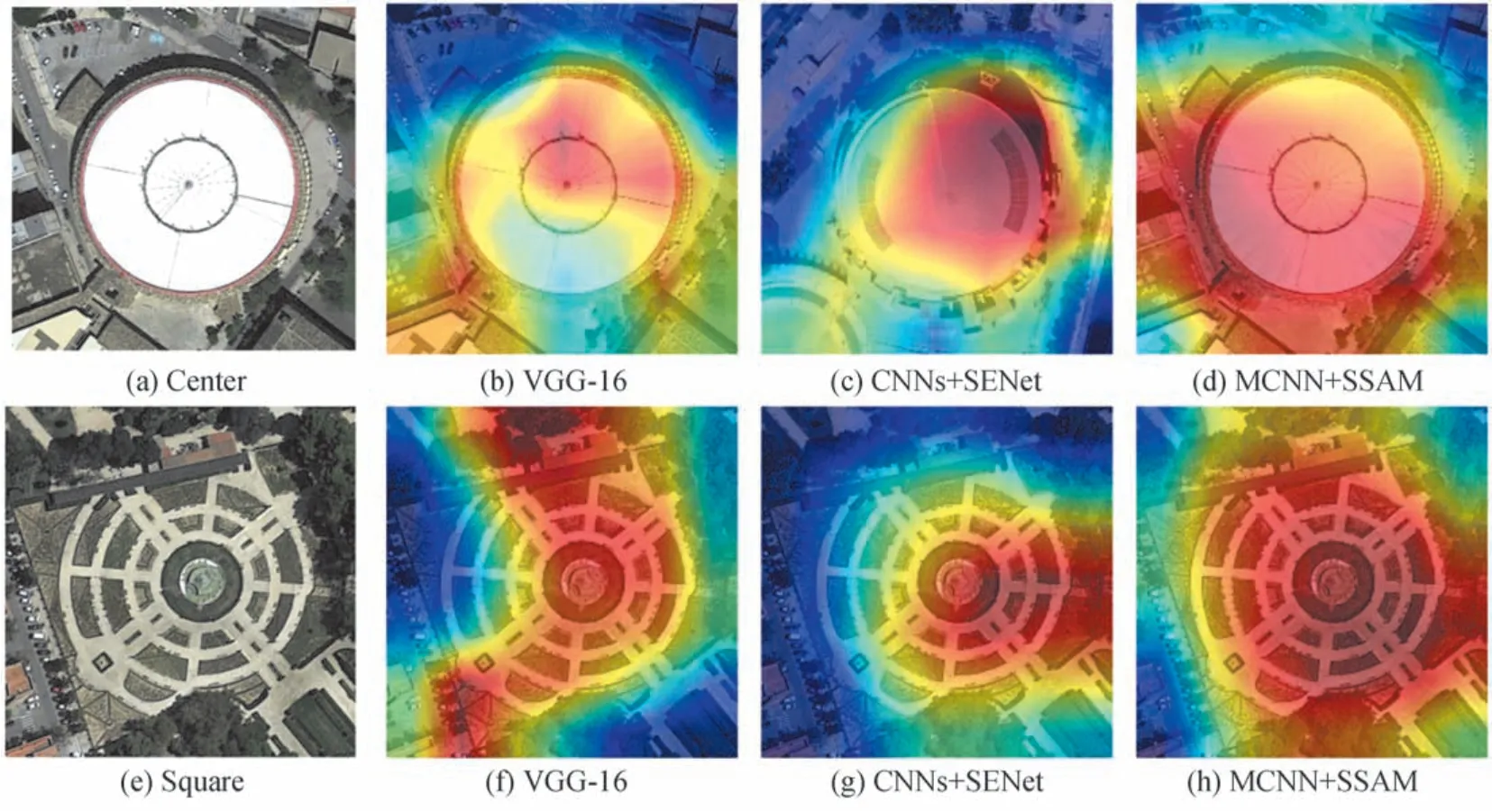
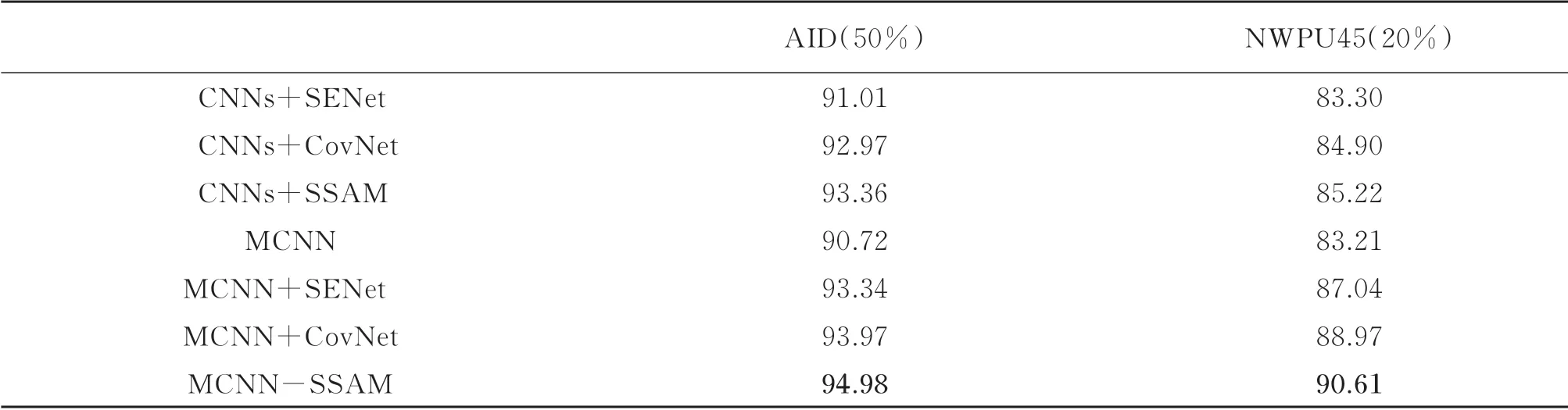
式中,F∈R1×1×b是通过最大化操作,遍历字典A中每个原子聚合得到的,且b< 式中,Conv1×1(•)为1×1 卷积操作,其目的是通过降维操作,完成对深度卷积特征G通道信息的自动学习,建模金字塔卷积特征空间域通道维度之间的相互依赖性,有效地增强有价值特征信息的特征响应,抑制无价值特征信息的特征响应。σ(•)为sigmoid 激活函数,⊗为特征图通道乘法。稀疏二阶注意力模块在从二阶特征统计量获取多尺度深度特征通道之间相关性的同时,顾及二阶特征统计量的特征冗余性,可以得到更好的特征增强效果。最后,引入逐像素归一化层增强特征的可判别性,主要包括符号平方根归一化层和l2归一化层,具体计算公式为 式中,Gij'为G'特征向量的第i行第j列个特征描述子,sign(•)为符号函数,即:当Gij'>0 时,sign(Gij')=1;当Gij'=0 时,sign(Gij')=0;当Gij'<0 时,sign(Gij')=-1。κ为一个小整数,以保证算式有意义。 为了验证所提网络的有效性,利用两个应用较为广泛且数据量规模较大的遥感图像场景分类数据集进行验证实验[24-25]。AID(Aerial Image Dataset)数据集中的场景图像来自于谷歌地球,其中包括10 000 幅图像尺寸为600像素×600 像素的场景图像,空间分辨率为1~8 m,共分为30 个场景类别(如图4所示):机场、海滩、桥梁、山脉、森林等。 图4 AID 场景实例Fig.4 Sample charts of AID dataset NWPU45(NWPU-RESISC45 dataset)数据集是一个由沙漠、篮球场、湖泊、岛屿、火车站等45 个类别的场景图像所构成的,共包括31 500 幅图像尺寸为256像素×256 像素的场景图像,空间分辨率为0.2~30 m。NWPU45 数据集场景示例如图5所示。 图5 NWPU45 场景实例Fig.5 Sample charts of NWPU45 dataset 选定VGG-16 网络作为MCNN-SSAM 的主干网,利用Adam 优化器进行网络端到端训练,相关参数设置如下:初始学习率0.01、权重衰减系数0.001、数据批次大小(batch size)32、动量0.9,其他参数设置将在2.3节中讨论。本文利用PyTorch 深度学习框架进行网络搭建与实验,硬件平台为:GPU:NVIDIA GeForce GTX 8G 1070 Ti 和RAM:32 GB。 本文所提MCNN-SSAM 中稀疏二阶注意力模块包的两个重要参数:字典中的原子数量b和低秩矩阵参数v,对所提网络的场景分类性能有较大影响。故图6给出了不同的b和v下,MCNN-SSAM 的AID 遥感图像场景数据集上的场景分类总体精确度(Overall Accuracy,OA)。这里随机选取数据集中20%场景图像作为训练集,10%作为验证集,70%作为测试集。 图6 b 和v 对MCNN-SSAM 网络性能的影响Fig.6 Influence of b and v on MCNN-SSAM 从图6可以看出,不同的低秩矩阵参数和原子数量对网络性能会有不同程度的影响。当原子数量不断增加时,大多数情况下,网络分类准确率是先升后降,这种现象的产生多数情况下与所构建网络的复杂度和训练样本数量有关。特别地,并不是低秩矩阵参数和字典中的原子数量越大,网络性能越优。过大的低秩矩阵参数和原子数量会导致稀疏二阶注意力模块计算复杂度的增加,且过多的原子数量亦不能较好地建模金字塔卷积特征空间域通道维度之间的相互依赖性。通过上图可以看出,当v=8 192 和v=4 096 在b=5时,可以得到91.83%和91.86%的场景分类准确率。在综合考虑算法计算复杂度的同时,MCNN-SSAM 在后续实验过程中将低秩矩阵参数和原子数量设置为4 096 和5。 为了对比本文所提MCNN-SSAM 与其他相关网络的有效性,本小节利用AID 和NWPU45 公开数据集进行验证实验。在AID 数据集中,随机选取20% 和50% 场景图像作为训练集,其余作为测试集;在NWPU45 数据集中,随机选取10%和20%场景图像作为训练集,剩余的90%和80%作为测试集。为保证实验结果的可靠性,所有实验均进行5 次。所对比的相关算法包括AlexNet、VGG-16、SAFF、MSCP 和CapsNet 遥感图像场景分类算法。表1给出了相关实验结果,实验结果中,“+”前面的数字为5 次实验结果场景分类准确率的均值,“+”后面的数字为5 次实验结果标准差大小,该数值可以衡量模型的稳定性。 表1 不同算法效果对比Table 1 Performance comparison of other related algorithms AlexNet 和VGG-16 网络是经典的CNNs,在遥感图像场景分类方面,该类网络可得到一定的场景分类效果。SAFF[26]和MSCP 这两种算法均采用了多尺度特征聚合的方式,不同的是:SAFF 中所运用的是基于自注意力机制的特征融合方式;MSCP 采用二阶深度特征统计量描述遥感图像场景特征。从实验结果可以看出,在不同场景分类数据集和训练集比例的情况下,与AlexNet 和VGG-16 网络相比,SAFF 和MSCP 均有不同程度的提升(约为3.5%~9.0%)。CapsNet[27]将胶囊网络(CapsNet)与CNNs 有效结合,并以此提升遥感图像场景分类性能,并得到了与MSCP 性能相当的场景分类准确率。本文所提MCNN-SSAM 不仅利用金字塔卷积进行多尺度深度特征抽取,而且引入稀疏二阶注意力模块获取深度多尺度特征通道之间相关性,在顾及二阶特征统计量特征冗余性的同时,可以得到更好的特征增强效果。因此,MCNN-SSAM 可获得较好的场景分类效果,与基准网络VGG-16 相比,有5.0%~11.0%的性能提升;与性能较好的CapsNet 相比,也有0.20%~1.50%的性能提升。 为了更好地展示每一类遥感图像场景图像的分类效果,图7和图8分别给出本文所提MCNN-SSAM 在AID 数据集20%训练集比例和NWPU45 数据集20%训练集比例下的场景分类混淆矩阵。混淆矩阵中坐标系数字为数据集中每个类别名称,均按照其英文首字母顺序排序,横坐标为预测类别,纵坐标为真实类别。 图7 MCNN-SSAM 在AID 数据集20%训练集比例下的场景分类混淆矩阵Fig.7 Confusion matrix of scene classification on AID dataset under 20% training ratios 图8 MCNN-SSAM 在NWPU45 数据集20%训练集比例下的场景分类混淆矩阵Fig.8 Confusion matrix of scene classification on NWPU45 dataset under 20% training ratios 从该混淆矩阵可以看出,大部分场景类别可得到80%以上的遥感图像场景分类准确率。值得注意的是:部分场景类别,如AID 数据集中的山脉、高架桥,NWPU45 数据集中的丛林、海冰等场景均达到了98%~99%的场景分类准确率。另外,AID 数据集中娱乐场、NWPU45 数据集中宫殿的场景分类准确率在70%以下,造成该现象的原因可能是由于娱乐场和AID 数据集中的公园场景类间相似性较大,因此,造成23%的娱乐场类别误分为公园。同理,NWPU45 数据集中宫殿与教堂有较大的类间相似性,故有15%的宫殿类别误分为教堂。 本节通过类别激活映射(Class Activation Mappings,CAMs)进行特征图可视化[28]。CAMs 通过热图的形式对特征图进行高亮显示,以求从直观效果上可视化CNNs 所学习到的特征表述。图9给出MCNNSSAM 与其他相关网络的热图结果对比。 图9 MCNN-SSAM 与其他相关网络的热图结果对比Fig.9 Visual comparison of heatmaps between MCNN-SSAM and other related networks 从图9可以看出,VGG-16 所得到的热图虽然能够较准确地聚焦所识别场景区域,但较为发散。例如:在中央广场场景中,VGG-16 网络可以捕捉到中央广场所在区域,但范围较小,且不够精确;CNNs+SENet可以更好地将特征识别区域聚集在场景区域,但范围受限。例如:无论是在中央广场场景还是广场场景中,CNNs+SENet 网络均能够捕捉到广场区域,且较为集中,但忽略了场景周边环境信息对分类效果的影响;本文所提出的MCNN+SSAM 不仅能够将特征识别区域聚集在待识别的场景区域,还可以顾及到周边环境区域,激活区域范围较大,且定位较为准确,故MCNN+SSAM 可以得到更优的遥感图像场景分类效果。 MCNN-SSAM 中MCNN 和SSAM 两个模块,为验证这两个模块的有效性,表2给出相关消融实验结果。同时,本小节还将MCNN-SSAM 中的稀疏二阶注意力模块替换为基于一阶特征统计量的SENet 和基于二阶统计量的协方差注意力机制CovNet,以此验证所提稀疏二阶注意力模块的有效性。 表2 消融和泛化实验结果Table 2 Results of ablation and generalization experiments 从表2可以看出,无论是CNNs 深度特征还是多尺度MCNN 深度特征,与基于一阶特征统计量的注意力机制(CNNs+SENet 和MCNN+SENet)相比,基于二阶特征统计量的注意力机制(CNNs+CovNet、CNNs+SSAM、MCNN+CovNet 和MCNN+SSAM)所得到的场景分类准确率均有不同程度的提高。同时,通过对比实验可以看出,MCNN 模块、SSAM 模块以及这两种模块的融合均对遥感图像场景分类效果的提升有促进作用,例如:与CNNs+SSAM 相比,MCNN-SSAM 的场景分类效果提升了1.62%~5.39%;与CNNs+CovNet 相比,MCNN+CovNet 的场景分类准确率有1.0%~4.07%的提升。另外,在CNNs 实验部分,与CNNs+SENet 和CNNs+CovNet 相比,CNNs+SSAM 有着1.92%~2.35%和0.32%~0.39%的性能提升;在MCCN 实验部分,与MCNN+SENet 和MCNN+CovNet 相比,MCNN-SSAM 的场景分类准确率提升了1.64%~3.57%和1.01%~1.64%。验证了本文所提稀疏二阶注意力模块的有效性。 针对地面目标尺度信息不同及场景特征描述困难所导致场景分类算法分类效果欠佳的现象,本文从深度特征学习的角度出发,提出稀疏二阶注意力机制驱动的多尺度卷积遥感图像场景分类网络。与单尺度卷积模块相比,金字塔卷积模块所得到的特征图感受野不同,且能够增强深度特征表述能力;稀疏二阶注意力模块利用稀疏二阶统计量进行通道相关性的计算,在顾及二阶特征统计量特征冗余性的同时,达到了特征增强效果。从场景分类精确性、混淆矩阵、可视化等多个方面的对比实验表明:本文所提MCNN-SSAM 在两个具有挑战性的遥感图像场景分类数据集上有较好的遥感图像场景分类效果。但本文所提网络需要手动设置的参数量较多,在未来的工作中,如何设计超参数较少且可生成鲁棒稀疏二阶统计量的算法,并将其嵌入至网络中进行端到端训练将是未来的工作重点之一;另外,构建一景遥感场景图像分类数据集,并在一景典型遥感图像中验证本文所提网络的有效性同样值得我们关注。

2 实验结果与分析
2.1 实验数据集
2.2 实验设置
2.3 参数分析
2.4 与其他相关算法对比

2.5 可视化实验
2.6 消融实验
3 结论
