摘钩机器人在贯通式双车翻车机系统中的应用
2022-07-26张守波牟宗涛杨新杭
张守波,牟宗涛,杨新杭
(1.日照港股份有限公司第一港务分公司,山东日照 371100;2.北京汇力智能科技有限公司,北京 100070)
1 背景介绍
1.1 双车翻车机卸船系统
日照港翻车机卸车线采用了贯通式双车翻车机系统,系统设备包括定位车、推车机、夹轨器、翻车机本体等设备。翻卸火车车型为C64、C70、C80、C96系列敞车。
翻车机翻卸火车时,需要把整列火车按翻车机能力分组拆开(解列),然后推车机把车厢牵入翻车机平台,翻车机旋转翻卸车厢。推车机将下一组车厢牵入翻车机平台时,同时把已完成卸车的空车推出翻车机。定位机则用于首次牵引重车到推车机接车位,等待人工解列后,推车机牵引2列重车进入翻车机,定位机范围继续牵引重车到待接车位,也即解列位。如此循环,完成快速翻卸任务,如图1所示。
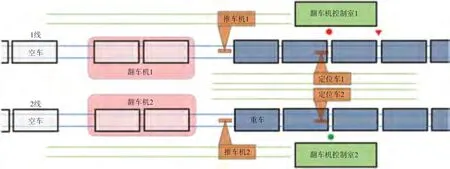
图1 贯通式翻车机形式
目前,翻车机系统主要工作流程已基本实现自动化,但火车摘钩仍然由人工完成。
翻车机系统人工摘钩作业缺点比较突出(图2):①作业空间比较狭小,工人存在卷入运行设备危险;②火车来煤昼夜不停,工人长时间工作精力不足,夜间工作效率降低;③翻车机区粉尘很大,对工人健康产生不利影响;④工人需要在未中断翻车机自动化作业程序的情况下,择机快速完成握持车钩手柄及解列动作,此时更容易出现人身伤亡事故。

图2 翻车机人工摘钩
日照港股份有限公司第一港务分公司南区1号翻车机系统由大连重工•起重集团有限公司生产。该系统卸车作业能力大约为60节/h。卸车系统为单机自动运行,也可进行就地操作,可调整为全线自动运行。
1.2 翻车机系统工作流程
翻车机系统工作流程如图3所示。

图3 翻车机工作流程
人工摘钩位置设置在翻车机重车线和控制站之间,此处布置有吊挂式按钮盒,当人工摘钩完成后,工人通过按压“摘钩毕”按钮确认摘钩完成。此时,拨车机短时启动牵引车厢完成车厢的完全摘钩和分离。按钮箱上设有拨车机点动前进和点动回撞按钮,用于摘钩分离不成功时的再次摘钩作业。摘钩作业时,夹轮器将重车列对应车轮夹紧。翻车机自动化程度低,需要人工实时参与作业,人工的工作强度大,存在安全隐患,而且翻车机卸煤区域煤尘严重,对作业人员身体健康产生不利影响。
2 车钩形式
车钩内部结构精巧(图4),由于车厢类型不同,车钩形式分为上作用式车钩和下作用式车钩(图5、图6)。

图4 车钩内部结构
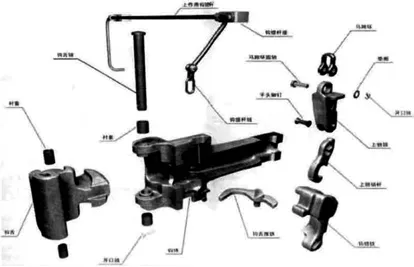
图5 上作用式车钩详细部件
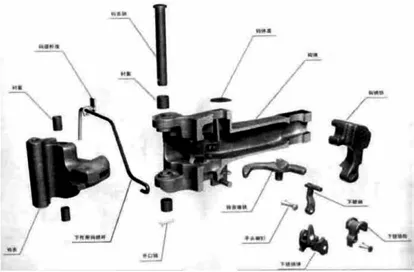
图6 下作用式车钩详细部件
手柄位置分为高位和低位;手柄摘钩动作也分为两种:一种是旋转摘钩,另一种是上提后旋转摘钩。
3 摘钩机器人作业过程
随着人工智能技术的迅速发展,机器视觉技术、多轴机械臂技术、激光雷达等人工智能技术在重工业场景下的应用日益广泛。本项目定制研发多轴摘钩机械臂,通过机器视觉和激光雷达检测和识别目标手柄,融合多传感手段进行智能状态检测和高精度伺服电机控制等功能,达到机械臂智能自动作业,实现自动摘钩工作。
3.1 列车编号机器视觉识别
快速确定对应的摘钩方式是摘钩机器人快速完成摘钩动作的技术关键。这个问题可以通过识别列车编号的不同类型而区分摘钩方式和手柄样式。
在机器人摘钩前序特定位置安装高清摄像头,采用基于机器视觉的图像识别技术,利用深度学习网络结构,训练车号特征模型,最终实现了在复杂环境工况下车号特征的准确识别,功能完善,性能可靠。
3.2 机器人摘钩
摘钩机器人布置见图7。

图7 摘钩机器人布置
摘钩机器人配备多轴机械臂、智能视觉识别系统及高精度雷达,可以准确区分不同车型的车钩情况,根据识别到的车钩情况,应用不同的摘钩策略,完成模拟人工拉手柄的摘钩动作,实现火车车厢自动摘钩,如图8所示。
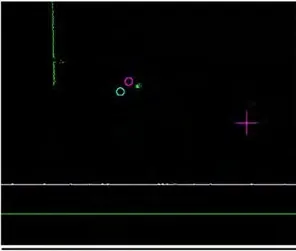
图8 车钩手柄雷达识别
摘钩机器人通用性强,适用于各种类型敞车车厢,如C64、C70、C80、C96系列。其识别精准,具有找准车钩精准动作,摘钩时机合适;机型小巧,适用于狭小作业空间。
4 翻车机自动化系统
翻车机全自动化系统是将包括摘钩机器人系统无缝用于翻车机自动卸车流程,并完善必要的监控和检测环节,从而实现了翻车机系统的全自动化卸车作业。
4.1 软件升级
摘钩机器人必须接到系统允许摘钩指令后才能开始作业;首次摘钩失败后还应调动重牛回撞再二次摘钩;摘钩成功信号应反馈给翻车机控制系统。
上述功能的实现首先要求翻车机系统与摘钩机器人建立数据通信,然后完善升级翻车机系统控制逻辑,以实现机器人与翻车机系统的动作流程配合。
4.2 安全生产防护系统
翻车机作业线全自动无人值守系统是一个有机的整体,除摘钩外,还需将其他需要人工监视的部分作业流程纳入智能检测与全自动控制。系统新增基于雷达检测原理的翻车机内重车定位保护、空车挂钩未成功检测,基于图像识别的风管摘开状态检测、重牛轻牛沿线人员安全预警系统等,实现全面安全防护下的机器代人作业。
4.3 中控系统操作
摘钩机器人检测系统和交互界面位于翻车机中控室。其可以与机器人以及翻车机系统通信,确保机器人与翻车机系统协同工作,两者融为一体。同时确保翻车机系统内设备的主体地位,以翻车机系统正常工作为主。
5 在实际作业中注意的问题
翻车机摘钩机器人系统目前已在日照港股份有限公司第一港务分公司南区1号翻车机线卸车作业中得到了实际应用,效果良好。
系统成功应用的前提除了选择合适的高精度传感器、设计合用的摘钩策略、高效的软件算法外,在实际工程应用中以下几点值得注意:
(1)环境光线对机器视觉的干扰:系统应用了大量基于机器视觉的图像识别技术,但现场环境光线情况复杂(白天的直射阳光、夜晚照明光线等成像无用光),将会降低系统的检测、识别效果,软件必须采取有效算法祛除基本成像光源之外光线对视频数据的影响。
(2)雷达数据的有效处理:翻车机附近,煤粉浓度、湿度指标极高,煤粉颗粒、水汽等会对激光雷达的测量结果造成很大干扰。软件必须采取有效的关联滤波等智能筛选算法,“忽略”尺寸微小的粒子,描绘出粉尘后面的真实物体轮廓,将干扰减少到最小。
6 结束语
实践证明,贯通式双车翻车机系统投入列车编号识别系统、摘钩机器人、中控系统,替代人工实现了重车自动摘钩动作,实现了本质安全,补全了翻车机全自动卸车流程中的最后关键环节,有力推动了人工智能技术在港口的应用,切实提高了港口管理水平。
