仿蜘蛛机器人在火电厂钢结构除锈刷漆领域的研究及应用
2022-07-26焦世荣吕映斌李海涛魏晋宏李秋婷
焦世荣,吕映斌,李海涛,魏晋宏,李秋婷
(1.国能神福(石狮)发电有限公司,福建泉州 362700;2.山西三合盛智慧科技股份有限公司,山西太原 030032)
由于其他爬壁机器人在火电厂钢结构建筑的除锈和防腐喷漆工作方面应用存在很大的差距,还无法充分地实现对钢结构的除锈和防腐自动化。因此,文章基于爬壁机器人设计了一种能够适用于火电厂钢结构的仿蜘蛛机器人,并在机械结构方配备了喷砂枪与相应的设备,使得该机器人能够很好地应用在除锈和喷漆领域当中,最后通过MATLAB 计算与仿真,验证了仿蜘蛛机器人设计的可行性。这样不仅能够有效促进沿海电厂的防腐除锈效率,还对推动我国沿海电厂的可持续性发展具有重要意义[1]。
1 钢结构仿蜘蛛爬壁机器人总体结构设计
1.1 关键技术分析
文章设计的机器人主要应用于结构相对复杂且狭窄的火电厂钢结构建筑的除锈喷漆领域中,使其能够解决钢结构的自动除锈和喷漆作业。同时,还可以通过搭建相应的功能模块实现人工攀爬和手工喷涂的作业形式。这样不仅能够有效保障作业人员的安全,还能进一步提升钢结构的除锈效率和质量。因此,该机器人设计的关键技术主要分位,除锈技术、吸附技术、运动原理以及驱动和控制、电源等方面[2]。
1.2 吸附方式选择
爬壁机器人的吸附方式,直接影响了机器人在爬壁作业过程中的稳定性和运动能力。因此,可以将其吸附划分为4种:仿生吸附、混合吸附、电磁吸附以及真空负压吸附。而混合方式主要是由真空负压吸附和永磁吸附的方式共同组合而成的。不过,在考虑到滨海火电厂的地理位置以及电厂的锅炉钢结构等因素,在设计仿蜘蛛机器人的吸附方式时,选择了电磁吸附方式。
2 总体结构设计
2.1 总体设计方案
结合钢结构的爬壁机器人在除锈和喷漆领域中的作业要求,该设备的设计需要具备可环保的喷砂除锈作业和控制能力。并且机器人的设计,还需要其能够有效满足在狭窄且结构复杂的钢结构建筑表面实现吸附和移动等功能。因此,针对仿蜘蛛机器人的结构设计可以将其分为环保喷砂除锈、吸附机构、机械结构以及移动机构等部分。
该机器人的控制系统设计,主要通过对调节吸附机构、移动机构以及喷砂除锈装置等进行统一的控制,从而实现对电厂钢结构建筑表面的除锈和喷漆工作。其系统职能:①基于PLC 控制系统,实现对仿蜘蛛机器人的实时状态进行建设,然后对喷砂除锈机器人的多轴选择、启动、攀爬等相应的工作关联进行控制,以此促进机器人的喷砂和除锈工作的精度和响应速度得到进一步的提升。②利用新型传感技术,还可以实现对机器人的位置进行定位,并在远程控制的作用下完成钢结构建筑的表面除锈和喷漆作业。
2.2 仿蜘蛛机器人主体结构设计
除锈爬壁机器人作为当前阶段最热门的研究热点之一,许多学者纷纷提出了不同类型的爬壁机器人。但该些类型的机器人在火电厂的锅炉钢结构攀爬过程当中,均无法充分地满足实际作业的需求。而具备磁力的机器人虽然可以实现在钢结构上吸附,但轮式的吸附力相对不足,且不具备高性能的越障能力,进而无法充分实现对钢结构的除锈和喷漆作业。因此,文章提出了一种能够充分满足钢结构攀爬的仿蜘蛛机器人构型,具体见图1所示。

图1 仿蜘蛛机器人
该类型机器人的设计是基于蜘蛛生理特征,结合吊索、支腿以及身躯等方面,共同开发的一种钢结构攀爬机器人。同时,该机器人具备较高的负重能力,其吊索还为机器人的攀爬工作提供了充足的动力。而多足结构,使得机器人在除锈工作中,本体离开壁面,这样既可以保证机器人拥有足够的附着力,还拥有很强的障碍通过能力。并且该机器人只需要通过改变其牵引方向,就能够实现垂直爬行。
2.3 组成模块分析
受环境因素的影响,针对机器人的本体结构设计,通过利用模块化,实现了仿蜘蛛机器人的悬吊模块、躯体模块以及支腿模块、功能模块设计和辅助模块等方面的。
2.3.1 悬吊模块
该模块的设计可以分为外置和内置两个部分,外置部分通过吊索的一端在机器人本体上固定,将绞车外置在地面或者相应的结构上,通过滑轮实现了机器人移动。而内置部分,主要是将吊索和绞轮装配在机器人的本体上,使得另一端悬挂在钢结构上,具体见图2所示。
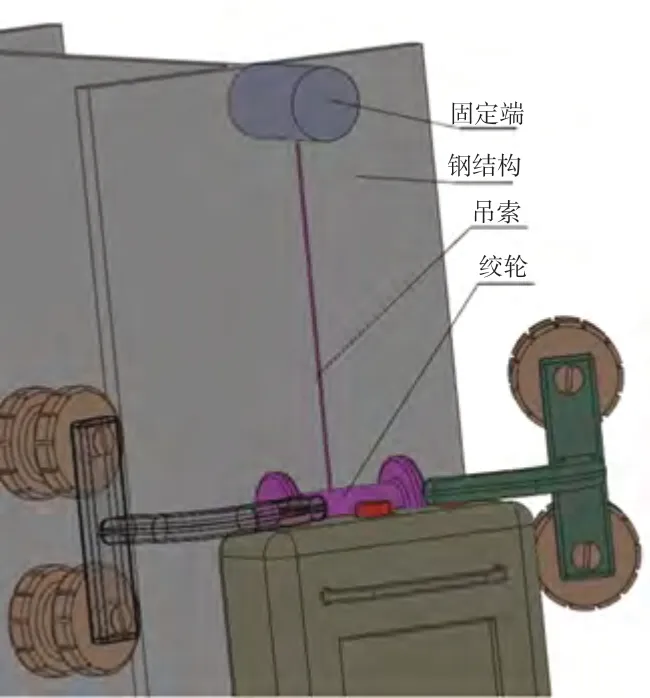
图2 机器人悬挂模块设计
2.3.2 功能和辅助模块
功能模块的设计主要包括检测、除锈和喷漆等3个部分。而辅助模块,主要是通过机器人的左侧臂、右侧臂以及弯臂,实现将机器人固定在钢结构上。
2.4 仿蜘蛛机器人的机械结构
由于仿蜘蛛型机器人是模块化的机器人,因此在机器人设计过程中,将其划分成前后本体、伸缩机构、支腿及滚轮以及电动摆杆等部分。
2.4.1 前本体
该部分设计主要作用于对传感器、吊绳收放机构以及前支腿和伸缩机构、除锈喷漆等相应的作业模块的安装。
2.4.2 后本体
该部分设计主要应用于对后支腿、除锈喷漆等作业模块的安装,并通过利用伸缩机构与前本体实现相对移动。
2.4.3 伸缩机构
该方面的设计,主要位于前本体和后本体两者之间。利用步进电机、滚珠丝杠以及导轨部件等共同组成。步进电机及丝杠安装于前本体上,丝杠螺母与后本体通过螺钉紧固。步进电机驱动丝杠转动,丝杠旋转带动螺母做直线运动,从而实现后本体靠近或远离前本体,实现机器人缩短或伸长。
2.4.4 支腿及滚轮
前后本体各有两只左右对称的支腿,各支腿连接两个滚轮。直流电机通过齿轮传动同时驱动左右支腿,通过电机正反转实现支腿的抬升或下落以越过障碍。齿轮传动放大力矩,通过支腿将滚轮压在工字钢侧面,从而为机器人移动、越过障碍提供支撑。滚轮与支腿通过轴承相连,“工”字型滚轮可以卡在工字钢侧面,为机器人在垂直工作面提供支撑,滚轮在机器人和工字钢之间提供滚动摩擦。
2.4.5 电动摆杆
固定在后本体顶面,通过直流调速电机带动摆杆转动,通过调节电机转速及摆杆角度可以模拟不同负载工作情况。
2.5 驱动与控制
2.5.1 吊绳收放机构
带抱闸闭环步进电机,驱动器电源DC24 V。闭环步进电机可以精确控制收放辊的角度,控制吊绳升降长度,从而可以实现机器人精确定位。同时步进电机驱动器体积小巧,甚至可与电机集成。
2.5.2 支腿
无刷直流电机,驱动器电源DC24 V。无刷直流电机采用电子部件代替传统电刷换相器,保留了直流电机的优良调速特性,低速力矩大、调速范围宽,电机体积小、效率高,同时克服了直流电机电刷容易打火、寿命短、维护复杂等缺点。与异步电机调速系统比,无刷直流电机具有体积小、效率高、过载能力强、系统简单、低速恒力矩等特点。
2.5.3 伸缩机构
步进电机,驱动器电源DC24 V。步进电机可以精确控制丝杠转动角度,通过丝杠旋转带动后本体做直线运动。步进电机体积小可与丝杠集成为直线丝杆电机,步进电机驱动器体积小巧,甚至可与电机集成,从而可以实现伸缩机构小型化。
2.5.4 电动摆杆
直流调速电机DC24 V。电动摆杆仅需要以不同的速度进行旋转,故选用调速性能好、使用及维修简单、过载能力较强,受电磁干扰影响小的直流电机。
2.6 信号传输
从信号传输方面的实际,主要利用Zigbee 技术通过2.4GHz 无线通信,实现了仿蜘蛛机器人与地面控制中心两者之间的通信。通过物联网通信,能够实现利用移动端对机器人进行控制。
3 仿蜘蛛机器人的力学特性分析
仿蜘蛛机器人的运动是步行框架式移动,因此在移动过程中,机器人的各项结构设计的质量重心,就会随着运动的位置发生变化。而机器人自身的吸附力、负载以及摩擦力三者之间存在一个相对复杂的关系。所以结合实际情况对仿蜘蛛机器人的运动建立了相应的位姿模型,然后结合模型对该机器人的静力学展开了相应分析。从而得出仿蜘蛛仿蜘蛛机器人在不发生向下滑移的失稳的基础上,对其最小吸附力进行了计算。当机器人爬行壁面与竖直钢结构方向呈现出等于72°的夹角时,机器人的吸附单元所需要的抗向下滑移最小吸附力最大,其值为480 N。在对机器人的纵向倾覆的临界情况进行考虑,如果两者之间的夹角等于71.5°时,该机器人的最小吸附力最大为290 N。所以,为了能够有效比较避免机器人在除锈喷漆工作中不会发生问题,需要结合实际作业情况对机器人的单元吸附力进行合理科学的配置。
4 仿蜘蛛机器人的性能仿真实现
为了能够保证仿蜘蛛机器人在火电厂钢结构除锈刷漆领域中的有效应用,文章对该机器人的可行性和适用性等进行了验证。并结合现场情况制定制定了相应的试验,如竖直钢结构表面的除锈试验等。
4.1 钢结构表面机器人除锈试验分析
4.1.1 除锈工作情况分析
文章所研发的钢结构仿蜘蛛机器人,通过攀爬和吊索的方式实现了对竖直钢结构表面的除锈和喷漆作业。作业过程当中,并没有出现机器人意外故障以及坠落等问题。同时,除锈时也没有产生污染环境的污染。由此可以证明环保可回收式的除锈喷砂功能的实现。最后借助远程控制系统,对仿蜘蛛机器人的上下左右移动等方面的功能实现进行了验证。从运动过程当中发现,该机器人的静态喷砂效率可以达到650 cm2/min。
4.1.2 除锈效果分析
由于钢结构的表面受外界气候和自然因素等方面的影响,会存在相对严重腐蚀的现象,如表面粗糙,漆面鼓泡以及脱落等现象。因此,通过除锈之后,钢结构表层的腐蚀物均被清理干净,且除锈达到了Sa3.0的标准。
4.2 实验结构分析
通过试验验证,文章设计的仿蜘蛛机器人在火电厂的锅炉钢结构除锈和喷漆工作中,其性能不仅满足了沿海发电厂的钢结构实际除锈工作需要,还没有任何环境污染物的出现,具体性能分析见表1所示。

表1 钢结构仿蜘蛛机器人的性能分析
5 结束语
结合火电厂的钢结构需求,设计的仿蜘蛛机器人利用了电磁吸附方式,实现了对火电厂复杂的钢结构除锈和喷漆工作。并通过对机器人的动力学模型建立,为电磁吸附单元的应用提供了相应的依据,最后利用MATLAB 仿真验证了该机器人设计的可行性和在工作过程中爬壁的安全性。并未仿蜘蛛机器人的设计提供相应的参考。
