两轴水平框架式粗跟踪结构及其控制系统设计
2022-07-26康永斌艾志伟陈振荣
康永斌,艾志伟,陈振荣,李 静
〈系统与设计〉
两轴水平框架式粗跟踪结构及其控制系统设计
康永斌,艾志伟,陈振荣,李 静
(桂林航天工业学院,广西 桂林 541004)
根据天基平台激光辐照空间碎片捕获系统的应用需求,设计了一种两轴水平框架式粗跟踪结构,提出了一种基于加速度闭环的PI速度环控制方法用于实现跟踪系统的闭环高带宽控制和高精度跟踪。首先,根据光束传播路径和负载几何尺寸要求设计了水平式粗跟踪框架的经纬轴结构,并对单轴结构进行了模型简化,建立了单轴二质阻尼刚度简化模型的动力学方程;对系统进行了振动分析,根据系统的谐振频率和电机锁定转动频率确定了跟踪架主要结构参数;设计了一种速度加速度双闭环控制系统,确定了系统控制器和控制参数;最后对控制系统进行了性能测试。测试结果显示,控制系统满足性能指标要求,相较于带有结构滤波器的PI速度环控制系统,带宽提升了28.2%;基于加速度闭环的PI速度环控制系统在调节时间上提升了78.6%,超调量降低了94.08%;基于加速度闭环的PI位置环控制系统的调节时间为0.085s,超调量为11.66%,具备较小的跟踪误差和较强的抗干扰能力。
天基平台;粗跟踪;结构设计;高带宽控制
0 引言
应用激光清除厘米级空间碎片是一种清洁、高效的空间碎片处理方式[1]。实现激光烧蚀清除空间碎片的基础是对碎片目标的捕获和稳定跟踪,复合轴系统是实现目标捕获跟踪的重要手段[2]。忽略激光作用时间时,激光瞄准辐照目标的本质也是对目标运动的跟踪,即想要提高激光清除空间碎片系统的瞄准精度和跟踪精度,首要目标就是设计性能优良的跟踪系统[3]。复合轴光电跟踪系统包括粗、精两个子系统,粗跟踪系统采用大惯量机架,对大视场的运动目标进行捕获和粗跟踪,然后再利用快速反射镜对粗跟踪过程中的残余误差进行小视场的精跟踪[4]。复合轴控制系统迅速发展,在运动平台光电跟踪控制领域,两轴四框架光电跟踪系统、基于信标光稳定的伪星参考系统、基于磁流变平台的跟踪系统等,都是复合轴控制系统的拓展应用[5]。
粗跟踪系统跟踪架的典型结构有地平式和水平式两种[6]。两轴地平式粗跟踪系统的运动轴由一根与地面垂直可做360°运动的方位轴和一根垂直于方位轴与地面平行的俯仰轴组成;两轴水平式粗跟踪系统由一根平行于地面的可做180°运动的经轴和与经轴垂直的纬轴组成。由于通常情况下天基平台是部署在外层轨道空间,对内层空间的碎片实施清除[7],当平台、碎片和地心位于同一直线时,平台与碎片间距离最短,光束传输时间也最短,所以期望激光辐照空间碎片的过程应该发生在距离最短的这段时间附近。
虽然两轴地平式跟踪架较水平式跟踪架具有更大的观测范围,但是其在天顶距为零时,方位跟踪速度会达到无穷大,这意味着目标与平台距离成最短距离这一小天区内,地平式粗跟踪平台无法正常跟踪目标,而两轴水平式跟踪架在天顶范围内具有良好的跟踪能力和最好的视宁度,因此考虑在天基激光清除空间碎片系统中,粗跟踪系统跟踪架的最佳方案是水平式结构[8],由于水平式跟踪系统的应用场合主要是在天基环境下,与地平式跟踪系统相比,不需要考虑风扰、大气湍流等外界环境变化对跟踪系统的作用,无需依靠大质量的基座抵抗外界高幅低频的扰动,因而还可以对跟踪架进行轻量化设计。
本文针对天基捕获跟踪的应用需求,设计了一种两轴水平式粗跟踪装置,在完成结构设计的基础上,对单轴驱动电机和负载部分进行了模型简化,建立了单轴跟踪架的动力学模型,根据振动分析结果、性能指标要求和与精跟踪系统之间的带宽匹配关系,确定了电机和负载结构参数,提出了一种基于加速度模型的双闭环控制系统,确定了控制系统的控制参数,最后对水平式跟踪控制系统的输出性能进行了验证和数据对比分析,为下一步进行样机试制奠定基础。
1 总体设计和动力学分析
跟踪架的主要功能是实现目标的指向、捕获和粗跟踪。根据天基平台的应用需求以及粗、精跟踪系统之间的带宽匹配原则,给出粗跟踪系统跟踪架的设计指标如表1所示。

表1 跟踪架设计指标要求
设计的两轴水平框架式粗跟踪装置,如图1所示。由于粗跟踪系统是具有大惯量的机架,在结构设计初始阶段,为了控制变量,简化分析和设计过程,可将粗跟踪装置简化成集中质量刚度阻尼系统,即二质刚度阻尼系统[9],如图2所示。
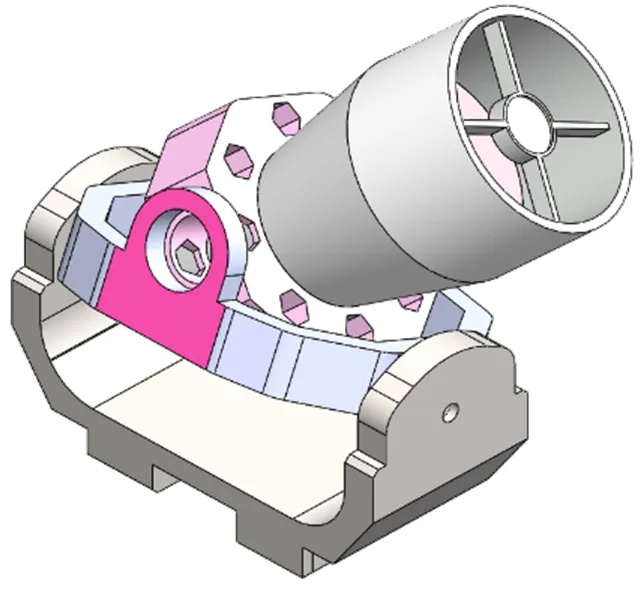
图1 两轴水平框架式粗跟踪装置

图2 二质刚度阻尼系统
下面以纬轴为例,对跟踪架分析和控制系统设计过程进行说明。在对跟踪架运动轴进行动力学分析的过程中,不仅要确认系统的固有频率,还要确定电机在锁定各轴绕回转轴线的扭转谐振频率-锁定转动频率,这是合理设计控制系统、预测系统动力学特性的基础。根据图2中所示关系,可以得到在电机端存在如下动力学方程:

式中:1是电机转动惯量;1()是电机转角输出信号;2()是负载输出转角信号;是电机与负载连接阻尼系数;是电机与负载连接刚度;e是电机输入转矩。负载端存在如下动力学方程:

式中:2是负载转动惯量。联立式(1)和式(2)进行拉普拉斯变换,容易得到电机输入转矩到电机输出角速度的传递函数v()为:

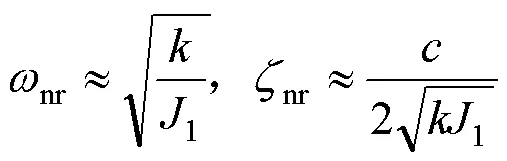
公式(3)中含有一对共轭的复极点,根据复极点在复平面的位置,可以计算得到系统的谐振频率nr和阻尼nr分别为:

由于电机转子转动惯量远小于负载的转动惯量,所以系统的谐振频率和阻尼系数可以简化为:
电机的锁定转动频率lr和阻尼lr分别为:

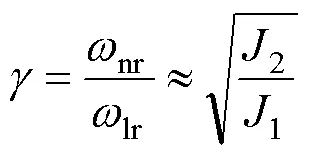
从公式(5)(6)中可以看出,电机与负载的连接刚度越大、转动惯量越小,系统的谐振频率和锁定转动频率越高,振荡幅值越小。为了定量确定转动惯量对频率特性的影响,定义如下关系:
为了避免系统发生谐振,系统的谐振频率应该尽量远离闭环带宽,也就是说系统连接刚度应该尽可能大以保证固有频率远高于闭环带宽,或者是让系统闭环带宽应该尽可能小。但是,为了使系统可以准确复现输入信号,又要求系统闭环带宽在高频扰动作用范围外尽量高。为了平衡上述矛盾,应该让连接刚度足够大以保证谐振频率高于闭环带宽,在避免谐振问题的同时实现高带宽控制。一般认为,设计过程中系统谐振频率与带宽b之间应满足如下要求[10]:

系统的一阶谐振频率wnr受控于电机转动惯量和连接刚度,系统运行过程中这两个量的变化很小,可忽略不计,因此将wnr作为基准数值,根据系统性能要求取wnr=14Hz,通过选取不同的转动惯量比值g,进行频率特性对比分析,仿真结果如图3所示,从图中可以看出电机和负载的转动惯量比值是影响系统频率特性的重要因素,负载转动惯量越大,锁定转动频率越低,反谐振峰值越大。设备运行过程中,转动惯量的改变将对控制对象模型产生很大影响。
根据上述分析结果,确定的跟踪架主要参数如表2所示。根据上述参数设计的纬轴跟踪架频率响应如图4所示,从图中可以看出,系统的谐振频率为14.1Hz,锁定转动频率为2.06Hz。
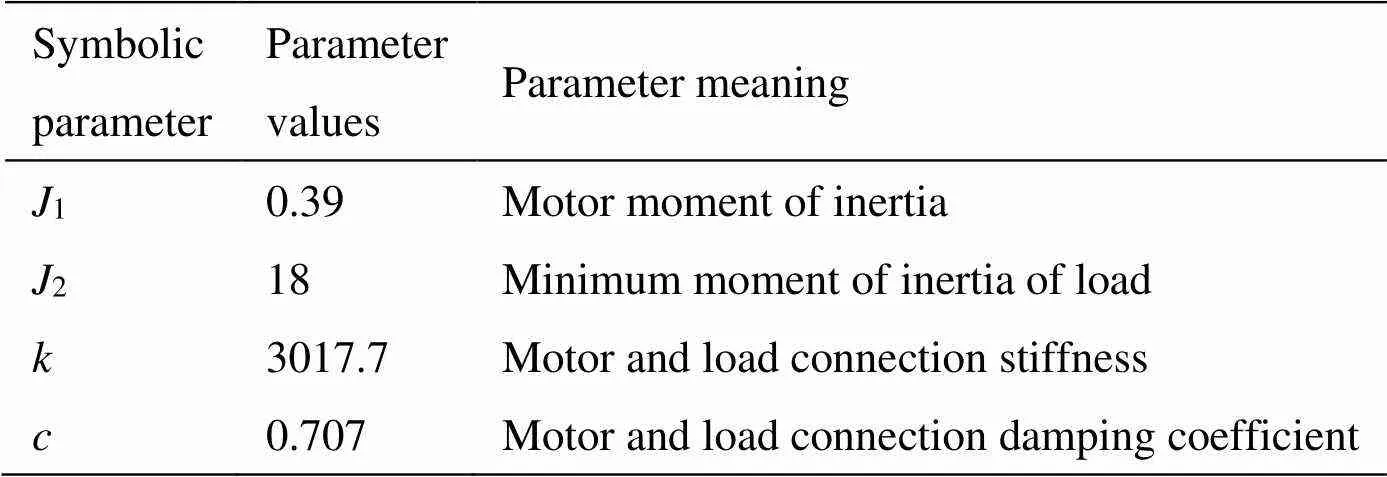
表2 跟踪架参数指标
2 控制系统设计与分析
通过上述分析可以看出系统在锁定转动频率处出现了较大的振荡,在谐振频率处出现了较大的峰值。为了抑制谐振峰值,保持系统动态性能的稳定性,通常是在系统中引入陷波器衰减谐振频率处的谐振峰,带有结构滤波器的PI速度环控制系统如图5所示。图中()是速度环PI控制器,f()是结构滤波器,v()是受控对象的速度模型。

图4 角速度模型传递函数伯德图
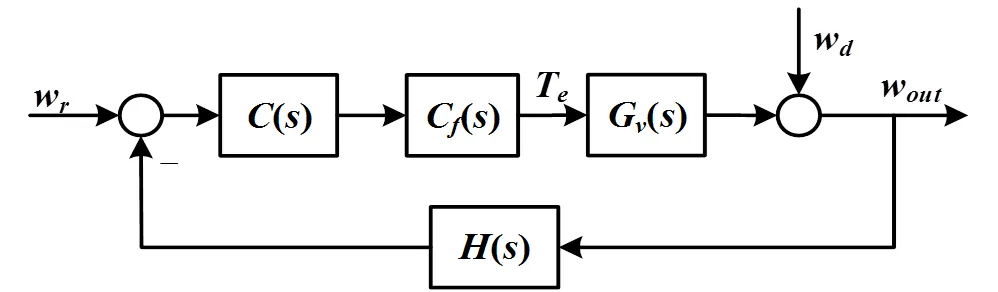
图5 带有结构滤波器的PI速度环控制系统
结构滤波器传递函数表示如下:

式中:fz是陷波频率,等于系统的谐振频率。fp等于系统的锁定转动频率,即fz=nr,fp=lr;fz,fp分别为结构滤波器的零、极点阻尼系数;为了实现对被控对象的零极点对消,设计的结构滤波器应该满足fz=nr,fp=lr,结构滤波器频率特性曲线,如图6所示。
对于单位负反馈系统而言,此时速度控制系统开环传递函数为:

式中:kp, ki是PI控制器的控制参数。
带有结构滤波器的PI速度环控制系统开环频率特性曲线如图7所示。从图中可以看出,整个频段被分成了低频、中频、中高频、高频4部分。由于双积分环节和二阶微分环节的作用,系统在低频段以-40dB的斜率快速衰减并在中频段保持常数,在中高频段和高频段,分别以-40dB和-20dB的斜率衰减。但是从中频段向中高频段过渡时,会在系统中引入新的振荡。带有结构滤波器的PI速度环控制系统,灵敏度函数为:
式中:Gvk是速度开环传递函数。上式表明带有结构滤波器的PI速度控制系统灵敏度是由速度开环特性决定的。
上述控制系统需要设计两个控制器,为了减少控制器个数,考虑到不完全微分PID控制也可以通过引入二阶微分环节对系统谐振峰进行抑制,尝试在控制系统中引入不完全微分控制用于代替PI控制器和结构滤波器的作用。

式中:p是比例环节系数;i是积分环节系数;d是微分环节系数;1是惯性环节时间常数。
系统的角速度模型可写成:

此时系统开环传递函数为:

不完全微分PID控制速度环控制系统框图如图8所示。系统开环频率特性曲线如图9所示。从图9中可以看到,开环系统在低频段同样是一个-40dB的倾斜直线,在中频段,系统展示出直线,实现一定的带宽,在高频段,系统有-20dB的倾斜,能衰减作用在系统中的高频噪声。
根据系统带宽要求,对应的期望特性中频段的截止频率取为c=87.9rad/s,此时有:

进而得到下列等式:
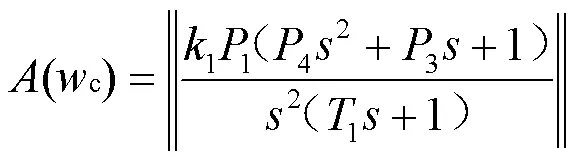

图9 不完全微分PID速度环控制系统的开环频率特性曲线
增益1的计算公式为:

式中:=1c23-c24+1;=1c34+c3-1c。
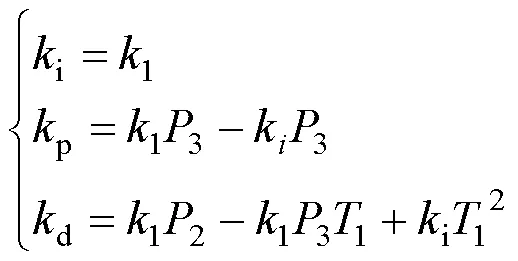
实际系统在获得上述频域特性时,根据上述等式可以得到方程组:
由于跟踪架在运行的过程中,纬轴转动惯量会随着镜筒位置的移动而改变,经轴负载转动惯量亦会随着纬轴运动而发生改变,系统阻尼系数也会受到负载运动位置、速度和工作环境的影响,所以经、纬轴的谐振频率和谐振峰值也会因此而发生改变,但是结构滤波器的频率却是固定,此时不论是带有结构滤波器的PI控制还是不完全微分PID控制不仅不能起到衰减振荡的目的,可能还会在系统中引发新的振荡点。此外,这两种控制系统虽然具有较好的动态性能,但是也容易因为扰动无法被快速抑制造成系统稳定精度下降。针对这一问题,提出了一种在速度环中增加加速度环的控制系统,以增强负载扰动的鲁棒性,同时实现对机械谐振的抑制。基于加速度闭环的PI速度环控制系统如图10所示。
加速度模型中存在二阶振荡环节,使得加速度环控制系统在使用过程中会存在低阶振荡;为了消除加速度闭环中二阶振荡环节,设计的加速度环控制器为:

对于单位负反馈系统而言,基于加速度闭环的PI速度环控制系统的开环传递函数为:

根据公式绘制出加速度环控制系统的开环频率特性曲线如图11所示。
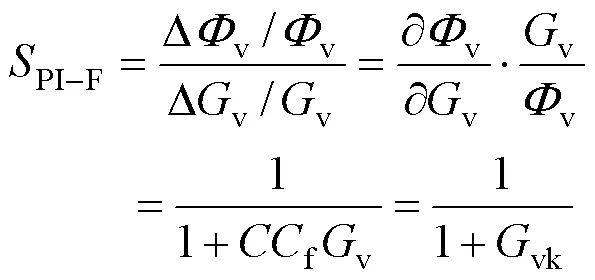
系统灵敏度函数为:
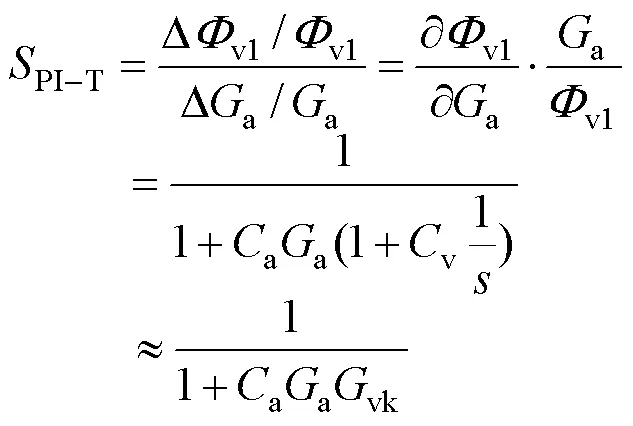

即速度加速度控制系统输出响应对模型变化的灵敏度降低,模型变化后速度加速度控制系统有更高的适应能力。
设计完成基于加速度闭环的PI速度环控制系统后,进一步设计位置环控制系统,基于加速度闭环的PI位置环控制系统如图12所示,图中()是位置环控制器。
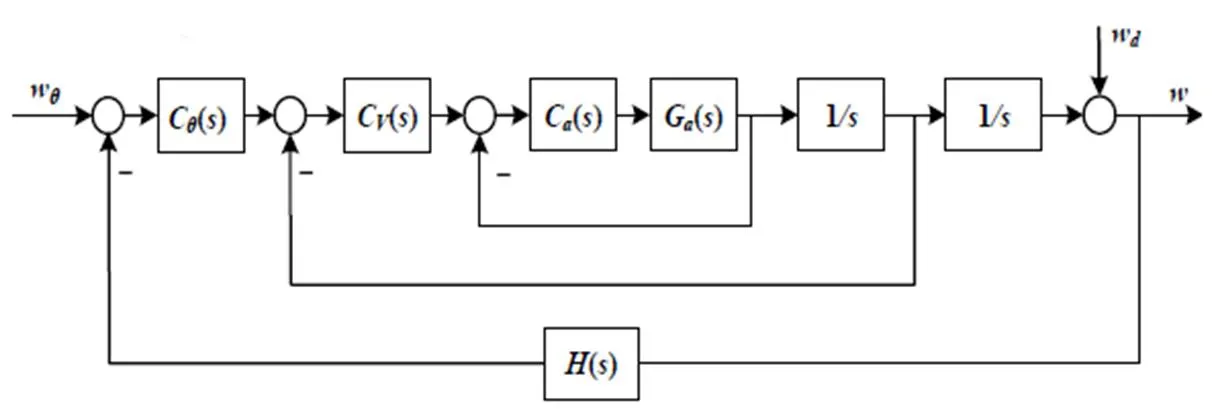
图12 基于加速度闭环的PI位置环控制系统
对于单位负反馈系统而言,此时基于加速度闭环的PI位置环控制系统的开环传递函数为:

3 性能测试
采用带有结构滤波器的PI控制器参数:p=25,i=250,带有陷波器的PI控制系统的闭环频率特性如图13所示。系统在谐振频率和锁定转动频率处会出现微小的振荡,其闭环带宽为11.7Hz,其带宽符合精跟踪的要求,但系统在过渡阶段还存在谐振和峰值。
当系统采用不完全微分PID速度控制系统时,不完全微分PID在消除了速度模型的二阶振荡环节,由于系统速度数学模型的分子同为二阶振荡环节,使不完全微分PID速度控制系统的闭环传递函数中仍存在着二阶振荡环节,系统在锁定转动频率处始终存在着振荡。因此,不完全微分PID控制无法消除速度控制系统的谐振,系统闭环频率特性如图14所示。
为了更好地消除谐振,增加系统带宽,提出了速度环中增加加速度环的控制系统,系统的闭环频率特性如图15所示,系统采用PI控制器和加速度闭环,其中p=80,i=100,消除了加速度模型的二阶振荡环节,系统的闭环特性曲线不存在谐振,相较于PI速度环控制器系统带宽在符合精跟踪要求的同时,由11.7Hz提升到15Hz。
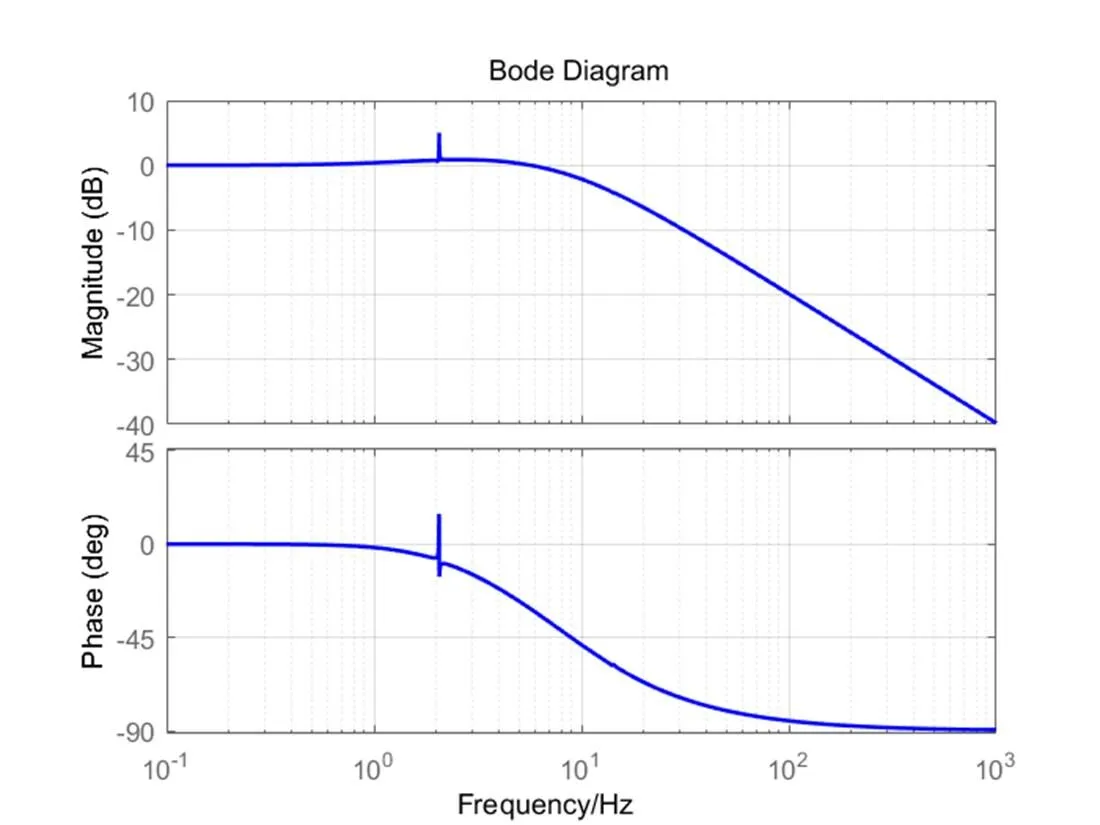
图13 带有结构滤波器的PI速度环控制系统闭环频率特性

图14 不完全微分PID速度环控制系统闭环频率特性

图15 基于加速度闭环的PI速度环控制系统闭环频率特性
进一步比较带有结构滤波器的PI速度环控制系统和基于加速度闭环的PI速度环控制系统的单位阶跃响应曲线如图16所示。
由图16可知,带有结构滤波器的PI速度环控制系统的调节时间为0.145s,超调量为9.65%;基于加速度闭环的PI速度环控制系统的调节时间为0.031s,超调量为0.57%。基于加速度闭环的PI速度环控制系统的动态性能指标要优于带有结构滤波器的PI速度环控制系统的动态性能指标。相较于带有结构滤波器的PI速度环控制系统,带宽提升了28.2%;基于加速度闭环的PI速度环控制系统在调节时间上提升了78.6%,超调量降低了94.08%。

图16 单位阶跃响应曲线
在确定加速度闭环的PI速度环控制系统后,为了使系统能够更加精准地捕获目标物体的位置,以此为基础进一步设计基于加速度闭环的PI位置环控制系统,()位置环控制器采用PI控制规律,其控制参数p1=50,i1=10,位置环系统闭环频率特性如图17所示,系统的闭环带宽为12.4Hz,符合与精跟踪系统的带宽匹配要求;根据控制系统框图搭建基于加速度闭环的PI位置环控制系统的simulink仿真模型,进一步得出系统的单位阶跃响应曲线如图18所示,基于加速度闭环的PI位置环控制系统的调节时间为0.085s,超调量为11.66%。
基于加速度闭环的PI位置环控制系统的simulink仿真模型如图19所示;同时,输入幅值为1的正弦噪声干扰信号,测试系统的抗干扰能力,系统的干扰信号输出曲线如图20所示,系统具有较强的抗干扰能力,干扰信号对输出的影响较小;当干扰信号为零时,系统的稳态跟踪误差信号输出曲线如图21所示,系统进入稳态后其跟踪误差为零,具有较高的控制精度。
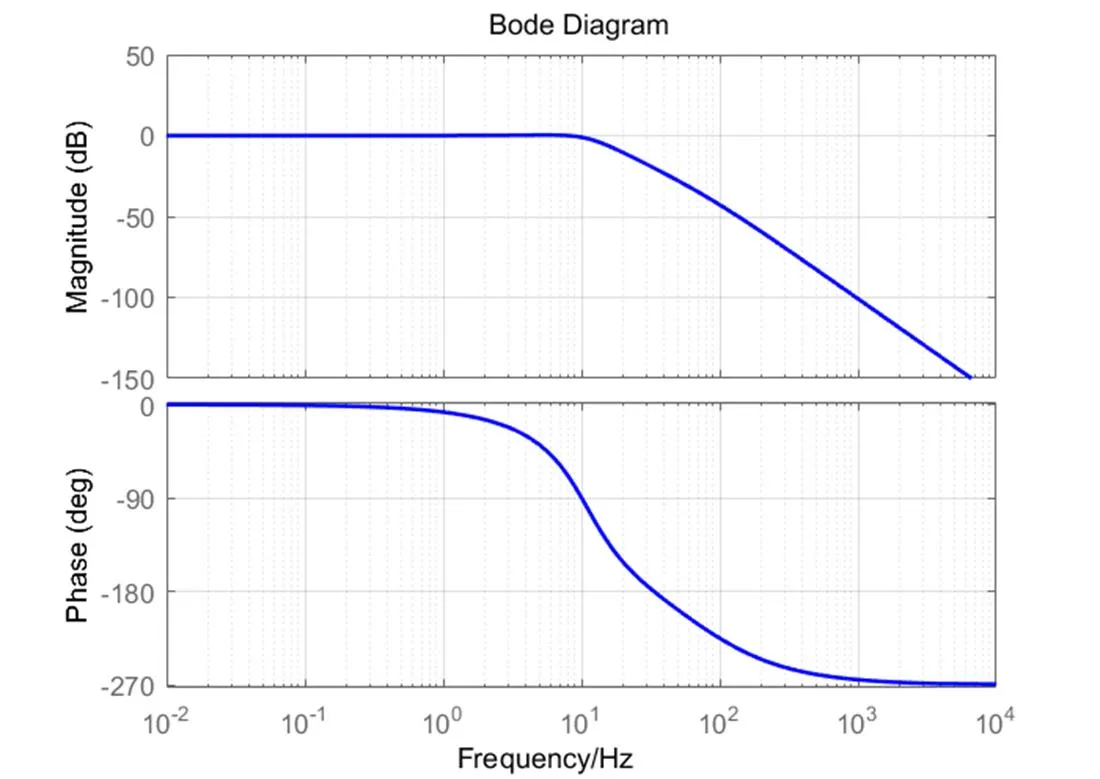
图17 基于加速度闭环的PI位置环控制系统闭环频率特性

图18 基于加速度闭环的PI位置环控制系统单位阶跃响应曲线

图19 基于加速度闭环的PI位置环控制系统的simulink仿真模型
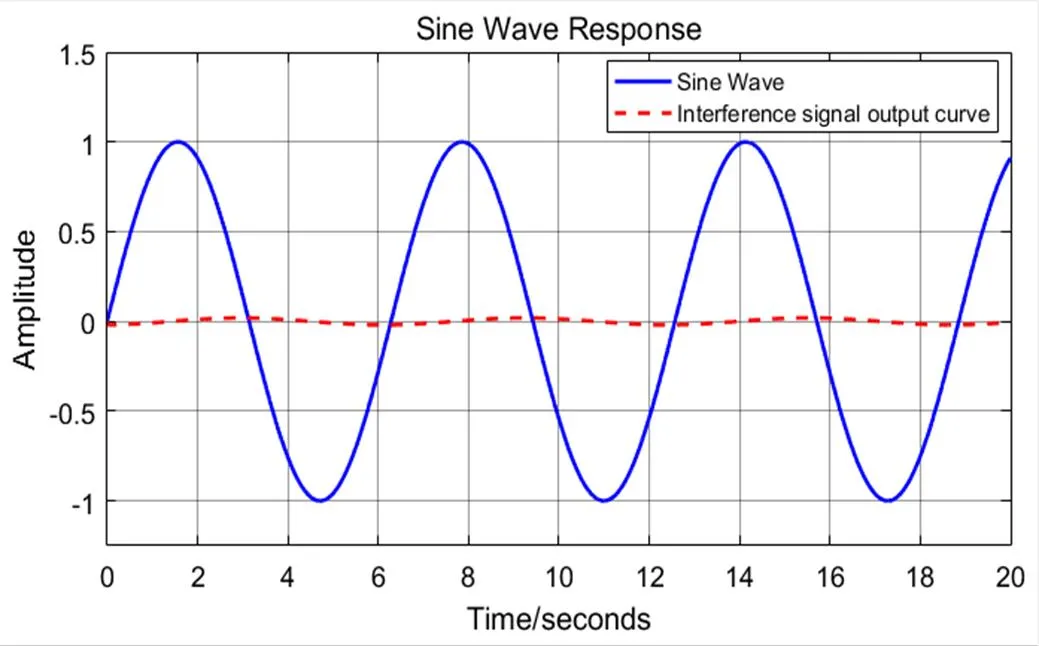
图20 正弦干扰信号输出曲线
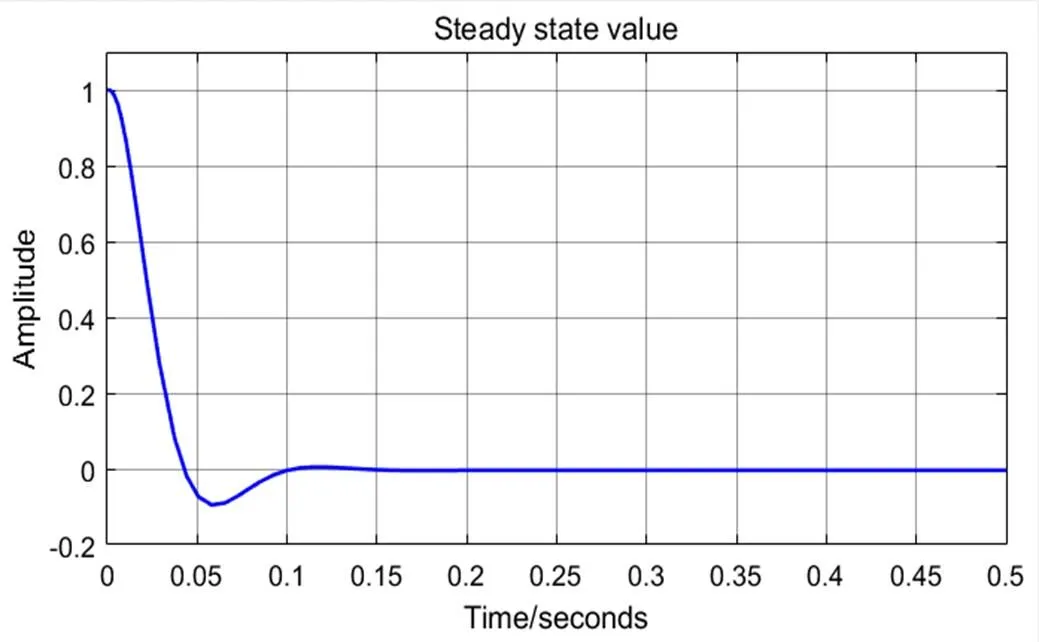
图21 稳态跟踪误差输出曲线
4 结论
通过基于结构滤波器的PI控制系统,设计PI控制器参数,利用陷波器消除系统的谐振峰值,实现对被控对象速度模型振荡环节的对消,通过测试闭环特性曲线,发现系统还会存在谐振。因此,进一步考虑不完全微分PID控制系统的设计,由于被控对象的速度模型分子和分母都存在二阶环节,这使得系统的闭环传递函数中仍存在二阶振荡环节,系统的闭环特性曲线在锁定转子频率处仍存在着反谐振。为了有效解决系统谐振峰值,提出一种基于加速度闭环的PI控制方法;通过设计加速度环控制器,消除角加速度模型中的二阶振荡环节,再通过PI控制器进一步提升系统的闭环带宽。通过比较带有陷波器的PI速度环控制系统、不完全微分PID速度环控制系统和PI加速度环控制系统的参数指标,PI加速度闭环控制系统在满足精跟踪要求的同时,有效地提升了系统的闭环带宽。因此,PI加速度闭环控制系统在满足精跟踪带宽要求的同时,可实现系统的闭环高带宽控制;同时,进一步设计的基于加速度闭环的PI位置环控制系统能够与精跟踪装置实现带宽匹配,具备较小的跟踪误差和较强的抗干扰能力。
[1] 洪延姬, 金星, 常浩. 天基平台激光清除厘米级空间碎片关键问题探讨[J]. 红外与激光工程, 2016, 45(2): 9-14.
HONG Yanji, JIN Xing, CHANG Hao. Discussion of key problems in space based laser centimeter orbital debris removal[J]., 2016, 45(2): 9-14.
[2] 邓永停, 李洪文, 陈涛. 2 m级望远镜跟踪架控制系统动态性能分析[J]. 光学精密工程, 2018, 26(3): 654-61.
DENG Yongting, LI Hongwen, CHEN Tao. Dynamic analysis of two meters telescope mount control system[J]., 2018, 26(3): 654-61.
[3] 罗勇. 基于信息融合的运动平台光电跟踪控制技术研究[D]. 北京: 中国科学院大学(中国科学院光电技术研究所), 2019.
LUO Yong. Information fusion based research on opto-electronical tracking control on moving platform[D]. Beijing: University of Chinese Academy of Sciences (Institute of Optics and Electronics, Chinese Academy of Sciences), 2019.
[4] 马佳光, 唐涛. 复合轴精密跟踪技术的应用与发展[J]. 红外与激光工程, 2013, 42(1): 218-227.
MA Jiaguang, TANG Tao. Review of compound axis servomechanism tracking control technology[J]., 2013, 42(1): 218-227.
[5] 唐涛, 马佳光, 陈洪斌, 等. 光电跟踪系统中精密控制技术研究进展[J]. 光电工程, 2020, 47(10): 3-31.
TANG T, MA J G, CHEN H B, et al. A review on precision control methodologies for optical-electric tracking control system[J]., 2020, 47(10): 200315.
[6] ZHENG S, HAN B. Investigations of an integrated angular velocity measurement and attitude control system for spacecraft using magnetically suspended double-gimbal CMGs[J]., 2013, 51(12): 2216-28.
[7] 王艺. 基于激光技术空间碎片的主动移除[D]. 南昌:南昌航空大学, 2015.
WANG Yi. Active space debris removal based on laser technology [D]. Nanchang: Nanchang Hangkong University, 2015
[8] 王卫兵, 王挺峰, 郭劲. 星载光电捕获跟踪瞄准控制技术分析[J]. 中国光学, 2014, 7(6): 879-888.
WANG Weibing, WANG Tingfeng, GUO Jin. Analysis of aperture photoelectric acquisition tracking aiming control[J]., 2014, 7(6): 879-888.
[9] 邓永停, 李洪文, 王建立. 提高大口径望远镜控制系统闭环带宽的方法[J]. 红外与激光工程, 2018, 47(12): 1237001.
DENG Yongting, LI Hongwen, WANG Jianli. Methods of improving closed-loop bandwidth for large telescope control systems[J]., 2018, 47(12):1237001.
[10] 汪奎, 辛宏伟, 曹乃亮, 等. 空间相机快速反射镜的两轴柔性支撑结构设计[J]. 红外与激光工程, 2019, 48(12): 233-40.
WANG Kui, XIN Hongwei, CAO Nailiang, et al. Design of two-axis flexible support structure for fast steering mirror in space cameras[J]., 2019, 48(12): 233-240.
Structure and Control System Design for Two Axes Horizontal Coarse Tracking Frame
KANG Yongbin,AI Zhiwei,CHEN Zhenrong,LI Jing
(Guilin University of Aerospace Technology, Guilin 541004, China)
A two-axis horizontal frame coarse tracking was designed using the application requirements of space debris capture systems. A PI speed loop control method based on closed-loop acceleration was proposed to realize closed-loop high bandwidth control and high-precision tracking accuracy. First, the horizontal coarse tracking frame was designed based on the beam propagation path and geometric load size requirements. The model of the single-axis structure was simplified, and a dynamic equation for the simplified model of the damping stiffness of the two-dimensional single axis was established. Subsequently, vibration analysis was performed to determine the resonance frequency, locked rotation frequency, and main structural parameters of the tracking frame. Third, a double closed-loop control system with velocity and acceleration feedback was designed, and the parameters of the control system were determined. Finally, a performance test of the control system was conducted. The results showed that the control system meets the performance demands. The bandwidth of the control system was 28.2% greater than that of the PI speed loop control system. The PI speed loop control system based on closed-loop acceleration improved the adjustment time by 78.6% and reduced the overshoot by 94.08%. The PI position loop control system based on closed-loop acceleration had an adjustment time of 0.085s and an overshot of 11.66%, which exhibited a small tracking error and strong anti-interference ability.
space based platform, course tracking, structural design, high bandwidth control
TH74
A
1001-8891(2022)07-0732-09
2021-06-29;
2021-08-06.
康永斌(2000-),男,本科生,主要研究内容为光学精密仪器控制。E-mail:1277639381@qq.com。
李静(1983-),女,副教授,主要研究方向为机器人技术、机械电子技术应用。E-mail:jinglijl@126.com。
广西大学生创新创业训练计划项目(202111825089)。
