浅析朔黄铁路联锁系统
2022-07-26王玉麟
王玉麟
(国能朔黄铁路发展有限责任公司,沧州 062350)
面对日益增长的货运量需求,既有的运输方式已经不能满足运输能力需求,移动闭塞逐渐被提出并应用于重载铁路,它可以有效减小编组站发车间隔和区间运行间隔,提高车流密度。本文在联锁层面对移动闭塞应用于朔黄铁路进行研究和分析。
1 联锁功能介绍
1.1 进路办理
移动闭塞模式下,联锁设备根据列车属性(完全监控列车和非完全监控列车)来决定为列车办理单列车进路或多列车进路。单列车进路的办理方式和使用方式与既有固定闭塞系统一致[1],多列车进路的办理和使用方式则与单列车进路不同。相较于联锁的传统进路机制,本系统联锁在办理多列车进路后,一条进路内允许有多列车运行的运行方式,行车的追踪和安全由RBC 设备计算、防护。
1.1.1 进路办理原则
CI(计算机联锁)通过通信接口获得RBC 输入的每架信号机的列车接近状态,包括:完全监控列车接近、非完全监控列车接近(非完全监控列车接近、无车接近时,RBC 均发送 “非完全监控列车接近”),并根据接近信息来确定办理的进路类型[3]。
完全监控列车接近时,RBC 向CI 发送完全监控列车接近信息,被接近的信号机灭灯,联锁按照多列车进路办理条件来办理多列车进路。
非完全监控列车接近时,信号机常态亮灯。此时,若需触发进路办理,联锁则依据既有固定闭塞模式下的进路检查条件和办理方式来办理单列车进路。
1.1.2 进路选排、进路锁闭时连续检查条件
进路内方第一逻辑区段空闲(移动闭塞系统下的特殊检查条件);进路选排所需检查的其它条件详见《TB/T 3027-2015_ 铁路车站计算机联锁技术条件》[3]。
1.2 多列车进路解锁
多列车进路的人工延时解锁、区段故障人工解锁的检查条件和操作流程均与朔黄线联锁系统的既有情况保持一致。进路的正常解锁应根据进路内的最后一列车的轨道区段顺序占用/出清来执行解锁[4],下面通过5 种场景来详细介绍。
场景一:前车已办理完发车进路且信号开放,前车驶入岔区,如图1所示。
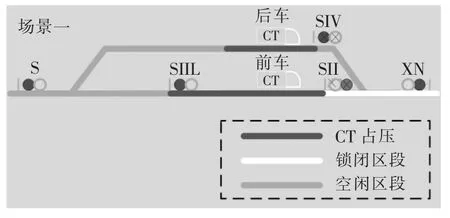
图1 场景一Fig.1 Scene one
场景二:前车完全驶离冲突道岔,道岔自动解锁,后车的多列车进路办理条件已具备,如图2所示。

图2 场景二Fig.2 Scene two
场景三:CI 为后车办理多列车进路,一个进路内允许多列车运行,如图3所示。

图3 场景三Fig.3 Scene three
场景四:多列车进路的前车出清进路轨道区段后,前后车进路内的重叠区段维持锁闭状态,如图4所示。
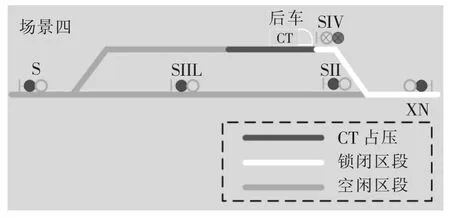
图4 场景四Fig.4 Scene four
场景五:多列车进路内的最后一列车出清进路轨道区段后,各区段按顺序执行解锁,如图5所示。

图5 场景五Fig.5 Scene five
1.3 进路取消
多列车进路内留有占用状态,此时不能通过总取消解锁进路。
1.4 信号机控制
1.4.1 信号机亮灭灯控制
为减少地面信号对完全监控列车驾驶员的影响,CI 设备根据需求控制进路内各列车信号机(含列兼调信号机)的亮灭显示[5],控制原则如下:
(1)RBC 将根据完全监控列车的行车许可方向顺序寻找临近的下一架列车信号机,若列车车头距该架信号机的距离满足灭灯距离要求且RBC 计算的行车许可终点位于或越过该架信号机,此时RBC 向CI 发送该架信号机的“完全监控列车接近”信息。
(2)CI 收到RBC 发送的“完全监控列车接近”信息后,驱动对应信号机的相关继电器,执行灭灯操作。
(3)当完全监控列车车头跨压信号机时,RBC将发送的“完全监控列车接近”信息变更为”非完全监控列车接近”,CI 在收到“非完全监控列车接近”信息后,将该架信号机恢复为亮灯状态。
(4)信号机恢复为亮灯状态时,其相关色灯显示应按照固定闭塞模式的要求执行。
(5)朔黄重载铁路移动闭塞系统下,考虑信号机的设置距离为1000 m[6]、ATP-RBC 通信延时、RBC-CI 通信延时、CI 对信号机的允许控制延时、列车最高运行速度、人眼的最远观察距离等因素,列车信号机(含列兼调信号机)的灭灯距离定为L m(L根据RBC 灭灯需求制定)。
(6)以下按照非完全监控列车追踪完全监控列车、非完全监控列车追踪非完全监控列车、完全监控列车追踪非完全监控列车、完全监控列车追踪完全监控列车、完全监控列车异常降级这5 种场景来分别说明CI 对列车信号机(含列兼调信号机)的亮灭灯控制过程。
场景一非完全监控列车追踪完全监控列车运行
非完全监控列车按照三显示固定闭塞方式运行,该列车的前方信号机始终为常亮状态。在完全监控列车尚未到达进路前方防护信号机的灭灯区段时,信号机保持亮灯状态,如图6所示。

图6 非完全监控模列车追踪完全监控列车运行Fig.6 UT train tracking CT train operation
完全监控列车到达进路前方防护信号机的灭灯区段时,该架信号机由亮灯模式转为灭灯模式,如图7所示。

图7 完全监控列车接近灭灯Fig.7 CT train approach lights off
完全监控列车车头越过信号机后,RBC 将发送给CI 的“完全监控列车接近”指令信息转变为“非完全监控列车接近”,CI 将该架信号机恢复为点灯模式,如图8所示。

图8 完全监控列车跨压亮灯Fig.8 CT train cross lights on
非完全监控车前方信号机保持点灯模式,非完全监控车需根据信号行车,如图9所示。

图9 非完全监控车正常亮灯Fig.9 UT train normal lights on
完全监控列车行驶并依次接近临近信号机,CI将依据RBC 发送的“完全监控列车接近”信息和“非完全监控列车接近”信息指令控制相关信号机的亮灭显示,如图10所示。

图10 完全监控列车前行继续灭灯Fig.10 CT train move on lights off
场景二非完全监控列车追踪非完全监控列车
信号机常亮,司机按照地面信号行车,如图11所示。

图11 非完全监控车亮灯行驶Fig.11 UT train move on lights on
场景三完全监控列车追踪非完全监控列车
重载移动闭塞系统中,完全监控列车需间隔一个轨道区段追踪非完全监控列车。完全监控列车的行车许可由RBC 发送,间隔区段追踪非完全监控列车的方式由RBC 来实现,如图12所示。

图12 完全监控列车间隔追踪非完全监控列车Fig.12 CT train Interval to track UT train
非完全监控列车按照固定闭塞方式运行[7],其运行方向的前方信号机始终点灯模式,如图13所示。

图13 非完全监控车既有模式运行Fig.13 UT train run in existing mode
注:CI 对完全监控列车前方的列车信号机亮灭灯控制过程与本节中的“场景一”相同。
场景四完全监控列车追踪完全监控列车
完全监控列车追踪完全监控列车时,两车可以运行至同一区段内,如图14~图18所示。

图14 完全监控列车追踪-前车灭灯Fig.14 UT train tracking-ahead lights off

图15 完全监控列车追踪-双车灭灯Fig.15 CT train tracking-both train lights off

图16 完全监控列车追踪-追入一个轨道区段Fig.16 CT train tracking-Chase into a track section

图17 完全监控列车追踪-前车跨压亮灯Fig.17 CT train tracking-ahead train cross lights off

图18 完全监控列车追踪-后车灭灯Fig.18 CT train tracking-rear train lights off
CI 对完全监控列车前方的列车信号机亮灭灯控制过程与本节中的“场景一”相同
需要注意的是,当两列完全监控列车同时处于某个信号机的灭灯区段时,前车跨压信号机后,RBC将向该信号机发送“非完全监控列车接近”,直至前车完全进入信号机内方且后车的MA 越过该信号机后,RBC 才会重新向该信号机发送 “完全监控列车接近”,让信号机再次灭灯。
场景五完全监控列车异常降级
完全监控列车追踪非完全监控车时,当后车(完全监控列车)发生降级变为非完全监控车时,RBC 给CI 发送的“完全监控列车接近”信息转变为“非完全监控列车接近”,信号机将恢复亮灯状态,如图19~图23所示。

图19 完全监控列车追踪非完全监控车Fig.19 CT train tracking UT train

图20 后车完全监控列车降级非完全监控车Fig.20 Rear CT train demotion UT

图21 完全监控列车追踪完全监控列车至一个区段Fig.21 CT train tracking CT train in one section

图22 完全监控列车追踪完全监控列车-前车降级非完全监控车Fig.22 CT train tracking CT train-ahead demotion UT train

图23 完全监控列车追踪完全监控列车-后车降级非完全监控Fig.23 CT train tracking CT train-rear train demotion UT train
完全监控列车追踪完全监控列车运行时,两车均在信号机的点灭灯区段内,当前车完全监控列车降级变为非完全监控车后,RBC 向CI 发送的“完全监控列车接近”变为“非完全监控列车接近”,信号机需恢复为亮灯状态;当后车(完全监控列车)降级变为非完全监控列车后,RBC 持续向CI 发送“完全监控列车接近”,信号机保持灭灯状态,直至前车的完全监控列车车头越过信号机后,RBC 持续向CI 发送“完全监控列车接近”将变更为“非完全监控列车接近”。
1.4.2 多列车进路信号关闭
多列车进路的信号正常关闭流程需按如下步骤进行:
(1)多列车进路的始端信号机开放后,完全监控列车接近该信号机,RBC 向CI 发送“完全监控列车接近”信息,CI 将该信号机控制为开放且灭灯状态。
(2)RBC 判断列车车头已越过信号机后,向CI同时发送“非完全监控列车接近”和“信号机跨压”信息,CI 在收到“非完全监控列车接近“信息后将信号机恢复为点灯模式;CI 收到“信号机跨压”信息后将信号机置于关闭状态。
多列车进路的信号机关闭场景如图24所示。
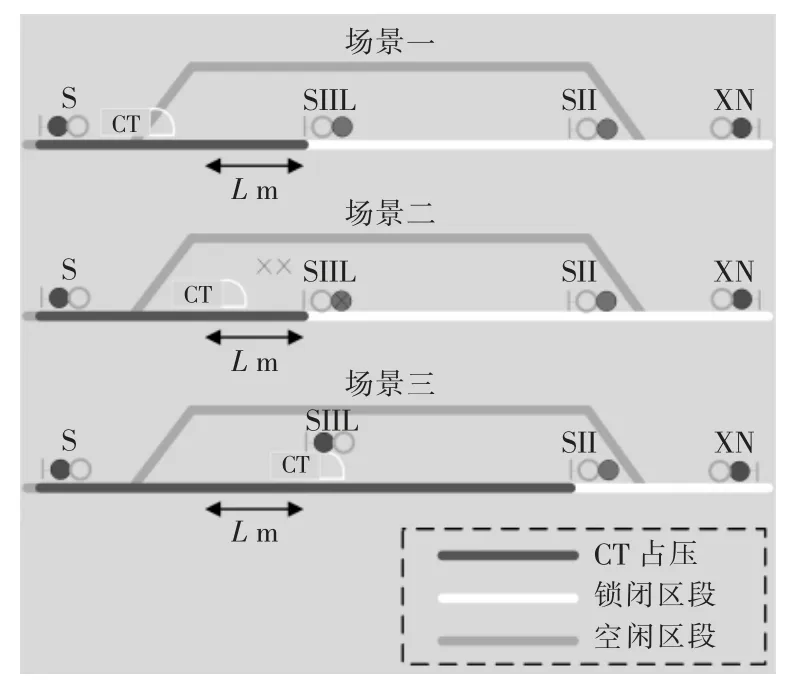
图24 多列车进路的信号机关闭场景Fig.24 Signal closing scene of multi train route
由于车载ATP 设备存在定位误差,RBC 可能在列车第一轮对未越过信号机前就向CI 汇报多列车进路内方第一区段被完全监控列车占用,同时RBC设备应保证列车第一轮对完全通过信号机后才向CI 发送“非完全监控列车接近”和“信号机跨压”。因此,当CI 检测到多列车进路内方第一区段被占用但未收到RBC 发送的“信号机跨压”时,CI 不关闭本架信号机,避免出现司机看到红灯的情况。
1.4.3 信号重开
完全监控列车接近时,多车进路的始端信号重开所需检查的条件:信号机内方第一逻辑区段空闲(移动闭塞系统下的特殊检查条件)。
1.5 区段融合处理
移动闭塞系统下,CI 设备既可以从轨道继电器状态判断区段占用/空闲信息[8],也可以从RBC 获取逻辑区段占用/空闲信息。CI 将两路信息进行逻辑运算融合后,用于车站站场状态显示。
针对移动闭塞模式的列车,CI 设备需要结合RBC 汇报的逻辑区段状态信息(占用/空闲)、CI 采集的轨道区段占用状态(GJ 吸起或落下),采用“或占用”(如表1所示)、“RBC 占用优先”原则进行融合处理,并将融合后的状态应用在联锁逻辑处理中。
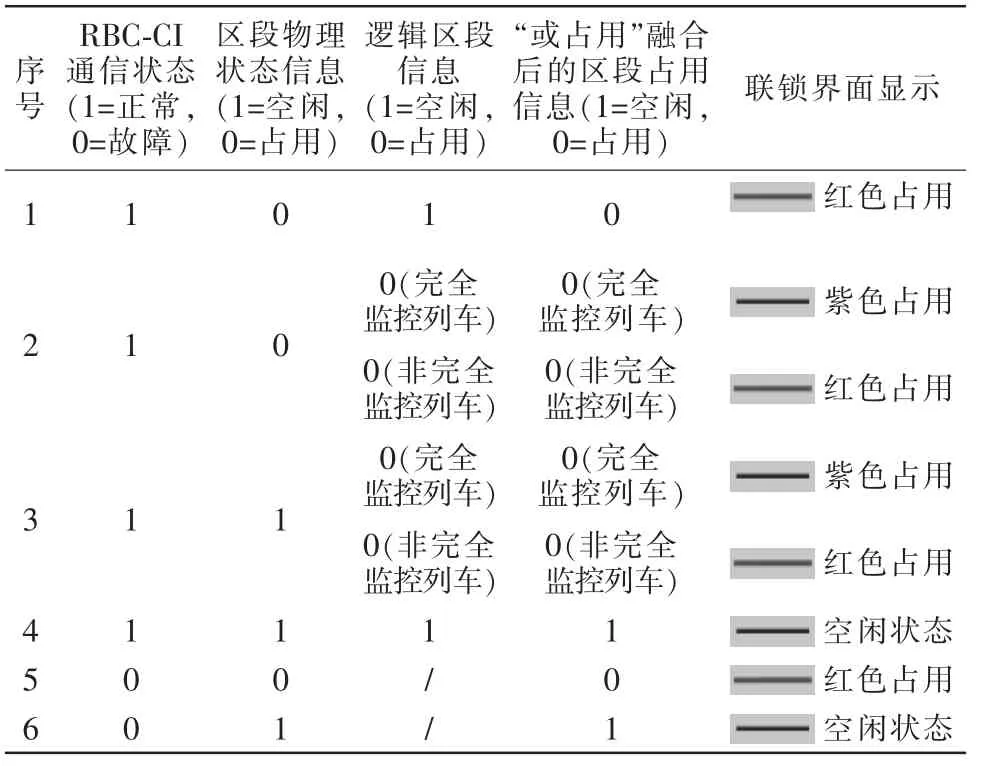
表1 区段融合表Tab.1 Section fusion table
1.5.1 区段“或占用”
RBC 以逻辑区段为单位向CI 汇报占用状态,根据本文的逻辑区段划分原则,朔黄线站内的逻辑区段按照物理区段进行划分,因此,对于站内的逻辑区段,CI 按照表1中的“或占用”逻辑进行融合处理即可。
1.5.2 RBC 占用优先
朔黄线区间的一个物理区段可能被分为多个逻辑区段,对于区间的物理区段,CI 需采用“RBC 占用优先”的原则进行占用状态处理。
如图25所示,1G 为区间的一个物理区段,1A、1B、1C 为1G 包含的3 个逻辑区段。当1G 处于空闲状态,有完全监控列车压入逻辑区段1A 时,CI 会采集到1G 占用,RBC 会汇报1A 是完全监控列车占用,1B 和1C 处于空闲状态。为避免CI 按照“或占用”融合出1A 是完全监控列车占用、1B 和1C 是非完全监控占用的情况,CI 需采用“RBC 占用优先”的原则,相信RBC 汇报的逻辑区段占用信息,将1A置为完全监控列车占用,将1B 和1C 置为空闲状态。

图25 逻辑区段划分Fig.25 Logical section division
当1A、1B、1C 均无车占用,RBC 汇报上述3 个区段空闲,但CI 采集到1G 占用,此时,RBC 未汇报占用,“RBC 占用优先”原则无效,CI 需按“或占用”原则进行处理,将1G 处理成非完全监控列车占用。
2 结语
移动闭塞对现有的计算机联锁系统有了更高的要求,它是当今铁路发展的趋势,相对于传统固定闭塞,它的发车间隔小、车列追踪运行距离小,能有效提高行车密度,在这种信号系统的助力下,朔黄铁路的年运输能力有望从当前的3.5 亿吨提高到4.5 亿吨。
