高精度协作式码垛机器人工作空间工艺优化
2022-07-25李鑫伟梁文滔
赖 啸 李鑫伟 梁文滔
(宜宾职业技术学院,四川 宜宾 644000)
伴随工业机器人在全球的普遍使用,一系列显著具备工业机器人开发、制备和营销能力的公司也如同复制一般在全球范围内不断涌现。随着现代工业技术的不断发展和智能生产能力的持续提高,工业机器人生产技术不断完善,而码垛机器人在不同行业当中也发挥了更为关键的效果。因为人们活动范围受限,各个工作场地人力不足的问题凸显,因而码垛机器人越来越受到各大企业的青睐。码垛机器人是应用机械设计、计算机科技、数控科技、人工智能来完成工业制备当中部件的高效抓取、传输、码垛、拆垛等性能的智能化设备,码垛机器人的诞生削减了制备以及人力支出,提升了工作速度。当下此类型设备在国内产业当中的份额不断提升,各个生产企业越来越意识到自动化智能装备的重要性。然而从市场调查发现仍有很多企业采用传统的人工方式进行包装码垛作业,他们不愿接受新的生产方式,一方面认为自动化设备投入成本高,另一方面就机器人的灵活程度和工作空间轨迹来看,还是达不到某些具体的人工要求。
码垛机器人的运行范围的轨迹设定是依据实际生产要求设定路线,依据装配氛围设计限制要求,实现稳定平滑的活动路线。工作空间轨迹设计的目的是让设备在制备生产当中维持高效、稳定、精准的工作情况,科学使用活动架构来提升工作效率,怎样技术改进更满足制备要求的运行空间轨迹,这就是我们此课题探究的关键。
1 码垛机器人工作空间轨迹分析
机器人轴的数量决定了其自由度。要是仅仅展开常规使用,4 轴设备即可满足要求。要是此设备要求在一个狭窄的范围内运行, 还要求机械臂实现扭转操作,5 轴或是6 轴的设备是最佳的工具。轴数确定一般是根据公司实际的要求。
某食品生产公司所应用的码垛机器人如图1 所示。参考此设备在应用上规定定位精准、工作手臂刚度高、驱动载荷高等条件,不过不考虑机械臂扭转操作的需求,此课题探究的食品码垛机器人使用通过4 个伺服电机驱使,还有4 个自由度的规划工艺。4 个自由度当中,2个移动副,还有2 个旋转副。机座的上部是腰部架构,此架构完成设定行为是传动设备本身转动;设备的手部架构的工作要求行为是绕轴转动,方便调节货物码垛的角度。设备的手部架构的水平,还有垂直活动都是经过电机来充当动力源,且通过带轮,还有丝杠架构取完成。为深入剖析,使用闭环矢量法针对码垛设备的架构展开架构运动学的剖析。依据码垛机器人的原理,且整合不同关节活动得联系,把它化简成如图2 表示的架构活动联系框架。

图1 码垛机器人实物图
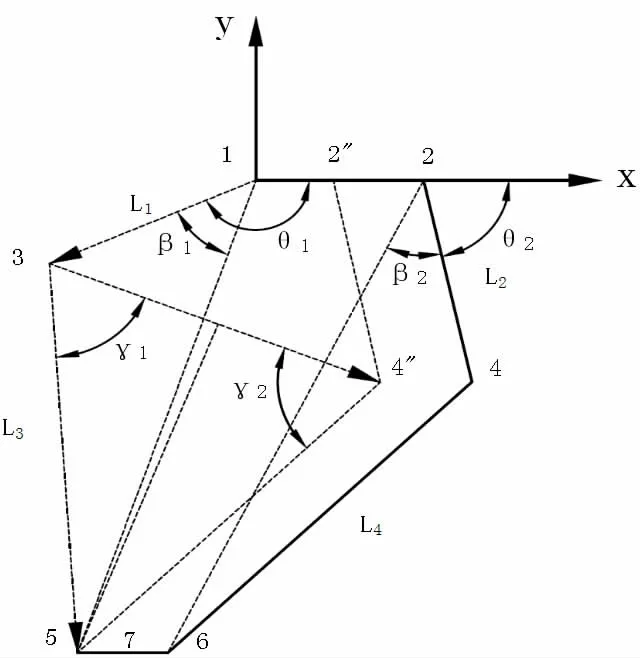
图2 码垛机器人各机构运动模型结构简图
设备关节点5 的坐标表达式由(2)式可知:

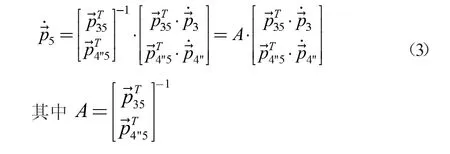
梳理后获得末端坐标和关节空间坐标的转换表达式,由(3)式可知:
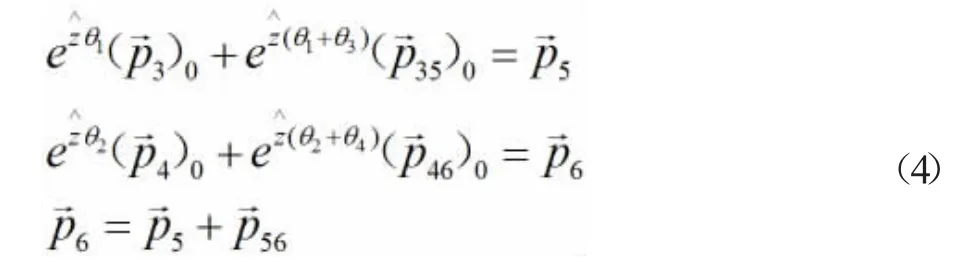
依据图2 搭建矢量转换联系如(4)式表示:
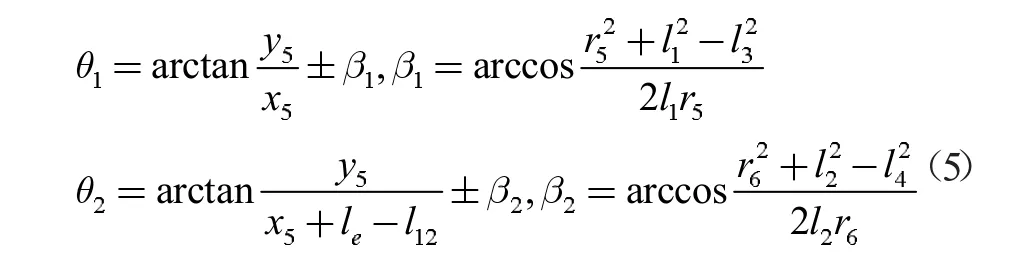
经过矢量转换获得设备末端坐标,还有关节角度的转换联系:
2 码垛机器人构建轨迹规划样条函数模型
经过码垛机器人的活动架构可知,通常仅能够获得核心坐标点,其在笛卡尔,还有关节空间的映射联系,无法表现工件末端的实际活动路线。此工程使用B 样条函数架构,使用B 样条表达式的特点展开B 样条插值仿真,获得更为客观的活动路线,其数学架构可由(6)式可知:

当中pj表示的是操控点,(t)表示的是P 度的基础表达式
上式表示为矩阵形式为
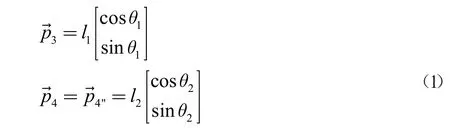
由图2 所示,点3 及4 的具体坐标能由(1)式表示为:
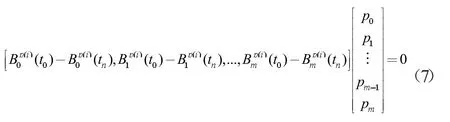
因为节点向量当中,有四个自由数据未知,能够规划最初,还有最终的速度、加速度,此刻线性架构当中存在(N+1)+4 个表达式,还有(N+1)+4 个不确定量:

此课题使用五次B 样条曲线展开路线的仿真拟合,能由(10)式表示为:

想要保障轨迹曲线的顺滑,要确保关节方位当中,其关节角的位移、速度、加速度等数据连续可导,要求搭建科学的边界要求,由(11)式可知:

3 码垛机器人运动轨迹曲线工艺参数优化
在设备的真实运行环节中,执行端的行为能拆分成提起、平稳转向演变、卸载3 个环节。由此,整合所剖析的设备运行范围规格,还有工艺数据改进之后的运行线路,规划执行端的核心坐标点,如图3 所示。
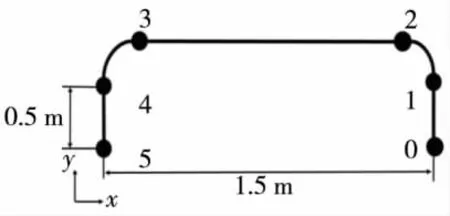
图3 运动轨迹曲线核心点参数改进
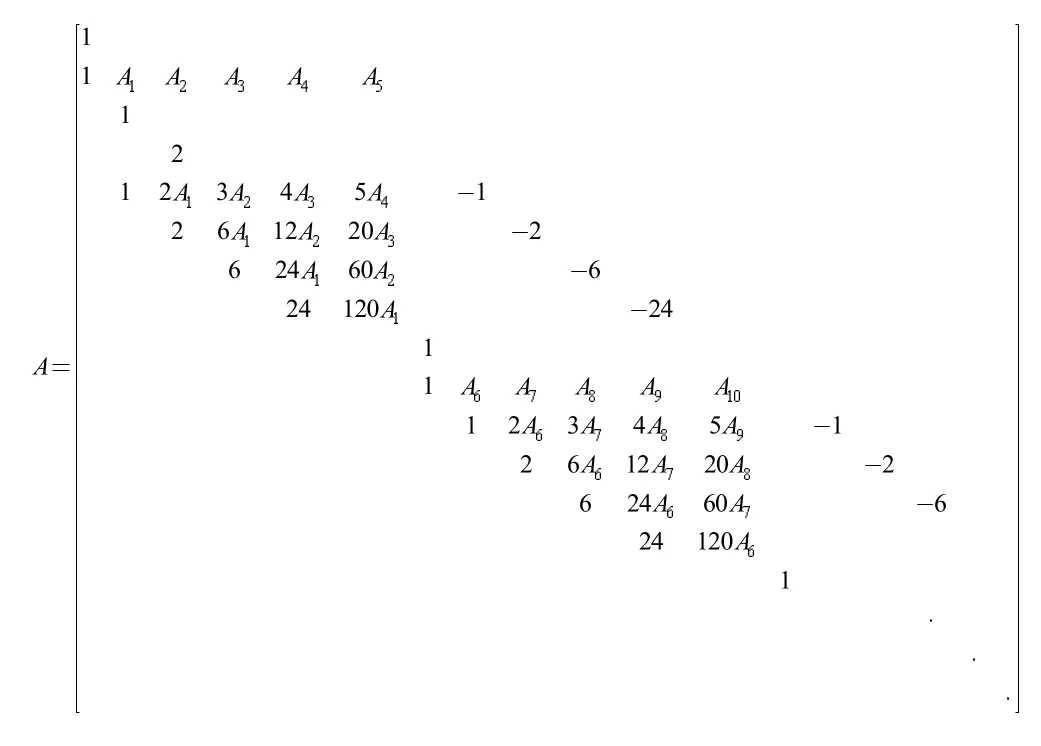
因为样条曲线能够获得持续的角位移、角速度,还有角加速度,且在各个邻近的转角值当中的样条曲线,其极值仅会在3 个部位大概率产生,方便运算获得极值,让它符合限制要求。而在设备的运行区间当中,根据核心位置使用三次样条表达式的手段对设备的路线展开设定。经过运动学逆向分析能够获得将设备的运动轨迹曲线空间的核心位置转换获得关节空间当中相对的核心点,包含未知数的有关时间的线性表达式,对其展开归纳获得A×P=C 矩阵,进而转换为P=A-1×C。
其中:
A 是24×24 的时间矩阵;
C 是24×1 的由已知量组成的矩阵;
P 为待求的方程组的系数。
依据矢量架构,还有整合轨迹设定样条表达式架构,编辑设备的笛卡尔,还有关节空间的路线设定程序,获得的仿真拟合曲线,其如图4、5 所示。

图4 左右驱动关节运动曲线示意图
图4 是设备的关节空间当中左右驱使关节的活动曲线,涵盖了驱使关节的旋转角度、旋转角速度,还有转动角加速度。我们可知经过整合轨迹设定,还有运动学逆向剖析获得的关节空间活动曲线的角度、角速度,还有角加速度,其表现为持续且光滑稳定的活动曲线。
经过对图4、5 展开剖析,完整运行环节当中,关节的速度,还有加速度表现出连续性,速度曲线平滑、改变相对稳定,能够保障机器人运动的平稳性。且笛卡尔,还有关节空间整合后的轨迹设定对比与独立的笛卡尔空间设定,或是关节空间设定获得的拟合曲线要显著优化,高品质的运动轨迹将会提升完整运动的稳定性,削减活动环节中的冲击,这对设备展开作业表现出关键的价值。此课题探究环节相对简便、计算效率高,可以符合限制要求,可以进行码垛机器工作空间的工艺优化设计。

图5 码垛机器人关节末端运动曲线
