一种智能蜘蛛机器人的设计
2022-07-25周佳俊陈泓宇张士顺刘帅文
李 博 周佳俊 周 宇 陈泓宇 张士顺 刘帅文 李 硕
(河南科技大学 机电工程学院,河南 洛阳 471003)
1 项目背景
我国仿生科技的发展已经接近60 年的历史,仿生学思想是我们人类在生物学和人类之间架起的一座桥梁,我们人类通过学习并运用生物学的相关原理,使我们不仅满足了自己的需求,同时也适应了自然的需要。我们设计的仿生智能蜘蛛机器人,不仅可以更好的学习蜘蛛的运动方式,且在现有的蜘蛛机器人能够实现普通行走和爬墙的功能上,又增加了一种攀爬树干的功能。
2 全地形智能蜘蛛机器人概况
如图1,蜘蛛机器人本身以铝金属作为框架,六个足部用24 个SR518 双轴舵机,具有较大的扭矩,足以支撑整个机械结构的运动,蜘蛛机器人的身体上主要有小型摄像头和树莓派控制板,可以实现全自动化和半自动化的模式切换。半自动情况下,可以通过树莓派与手机通信连接,可直接通过手机控制蜘蛛机器人实现在地面上的前进,后退等基本运动功能,也可通过手机观察摄像头的画面,可以帮助人类观察一些危险地段的内部情况。全自动情况下,蜘蛛机器人可以实现自动避障,自动到达目的地的功能,实现蜘蛛机器人自主完成任务的能力。
2.1 躯干设计
由于蜘蛛机器人的整个运动状态不需要对躯干部份有特别的需求,所以我们主要以铝合金材料作为蜘蛛机器人的整体躯干,铝合金质量较轻,能够大大降低整个机器人的质量,且铝合金较为柔软,强度优良,以及可加工性能好均是能够胜任我们材料选择的原因。如图2,整体躯干呈近菱形,两头窄,中间宽的设计方式可以减少六条腿之间的相互碰撞,使整个机器人更加稳定[1]。

图2 躯体为类菱形结构
在躯干和腿连接的部分,我们为了防止腿的根部在进行左右移动的过程中和躯体产生碰撞,导致腿部无法完成正常的左右旋转,如图3,我们以腿根部的旋转轴为旋转中心,向躯体内设计了一个类半圆形凹槽,来保证腿根部的正常旋转。

图3 半圆凹槽
同时为了能够固定腿根部舵机的安装,我们设计了悬空框架,分为上框架和下框架,如图4,5 所示,上框架是按照躯体以近菱形的形状设计而成,在与腿根部舵机安装的部位,设计了一个以旋转轴为旋转中心的U 型连接凹槽[2],能够完美的连接腿根部舵机,与躯干凹槽形成配合,同时U 型连接槽的设计相比较圆形连接槽能够减少用料,减轻整个产品质量,减低加工难度,且能与舵机完全连接,保证整个机械结构的正常使用。下框架除了设计有与上框架相同的结构,在下框架中,我们还增加了三根横梁,用来增加横向强度,增加下框架的受力能力,可以承受整个机器人在行走过程中腿根部向下的力。

图4 上框架
躯干内部搭载了4 代树莓派4b,该主板具有四核CPU 处理器,具有较快的处理能力,完全可以胜任机器人的运动计算要求,同时加配了ov5647 摄像头模块,具有500 万像素,树莓派通过和手机WIFI 通信,将摄像头拍摄到的画面传输到手机客户端。

图5 下框架
2.2 腿部设计
整个蜘蛛机器人的运动主要是依靠腿部支撑来完成的,所以我们采用了较大扭矩的SR518 双轴舵机,设计的6 足机器人,一足有4 个自由度,因此每条腿需要4个舵机,一共24 个舵机,24 个舵机使用24 路PWM控制器集中管理控制。相比较平常的三个自由度来讲,可活动范围更广,更方便实现机器人的转向,保持机械结构平衡等功能[3]。
腿部主要包括一个腿根部舵机,三个腿关节舵机以及减震足部。如图6,腿根部舵机可以实现整个腿部的左右旋转,是腿部和躯干连接的主要舵机,与躯体下框架配合承受整个机器人的载重力[4]。如图7,三个腿关节舵机能够实现腿部的抬起,向前移动,落地的动作,是腿部能够向前运动的主要关节,舵机与舵机之间的连接,同样采用的是U 型凹槽的连接方式,能够减少用料,降低加工难度,在连接件中间还加入了橡胶垫片,不仅有稳固连接件的作用,还能起到减震的作用,同是中间挖空的设计[5],是为了减轻整体的质量,减少材料用量,且经过力学分析,并不影响整体的受力情况。
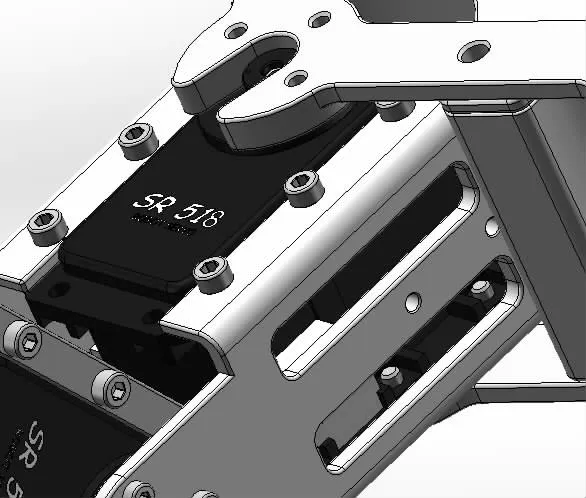
图6 腿根部舵机

图7 腿关节舵机及U 型槽连接件
如图8,9 所示腿部行走机构包括连接支架(12),在连接支架(12)上设置有电机(11)和丝杠,电机(11)输出轴带动丝杠轴(19)转动,丝杠轴(19)端部设置有支撑腿(18)。

图8 足部分析图
攀爬结构包括固定支架(14),固定支架(14)上部固定设置在连接支架(12)上,所述固定支架(14)上活动设置有用于攀爬的支腿,所述支腿包括内腿(15)和外腿(16),所述外腿(16)一端通过转动轴设置在固定支架(14)上,外腿(16)上设置有导轨,所述内腿(15)一端与所述导轨滑动连接,内腿(15)另一端设置在连接件(13)上,所述连接件(13)与丝杠轴(19)螺纹连接,电机(11)工作时,可以带动所述支腿松开或者抓紧,用来实现蜘蛛的爬树功能。丝杠轴(19)下部设置有用于连接件(13)限位的限位圈(20)。

图9 足部设计图
如图10,在足部我们设计了一个弹簧加橡胶减震的装置,弹簧安装在了圆柱装置中,采用的是高强度弹簧,能够有效的吸收腿部落地时产生的刚性冲击力,且能够有效的起到缓震的作用,最大限度的保护整个机器人,延长使用寿命,最后在足部我们设计了一个半圆的橡胶结构,不论在平面上还是在斜面上行走的过程中,都能与地面以某一个点为接触,且足部所受到的力是指向球心向里的,从而使八个足部能够支撑起整个机器结构,提高整个机器人的平衡性,同时因为使用的是橡胶材料,不仅可以提供足够大的摩擦力,还能够起到减震的效果,双重保证整个机械结构的平稳性[6]。

图10 蜘蛛机器人足部
3 结论
本研究的创新点主要是该攀爬结构可以帮助该智能蜘蛛机器人实现爬树的功能,目前现有的仿蜘蛛机器人主要以模仿蜘蛛的行走形态为主,主要设计蜘蛛行走算法,或者设计蜘蛛腿部的机械结构,多以能够用简单的腿部机械结构实现在平地行走为目的,设计蜘蛛能在多种地形上行走的发明技术较少。我们的这种创新,增加了能够实现攀爬得功能,对于蜘蛛得行走地形,又增加了一种新的地形。该产品的程序是基于python 语言的树莓派控制,python 语言是一种以简便著称的语言,简单易学,容易上手。而且整个机器人的材料轻便,便宜,与国内类似产品相比价格更低且适用范围更广,可应用于救援队规模性使用,也可个人使用。同时本产品轻便简洁,外形小巧,整体体积占用空间小;结构简单、能耗低,技术已相对成熟。
