基于多元约束的机载预警雷达跑道形航线规划
2022-07-25尹康银于海成
尹康银,于海成,王 光
(空军预警学院,武汉 430019)
0 引言
机载预警雷达普遍采用脉冲多普勒体制,依托载机平台的高度优势,能够在复杂的环境中探测空中目标,极大地提高了其完成任务的效能。机载预警雷达在执行任务时通常采用跑道形、8 字形、三角形以及圆形等多种任务航线类型巡航,并且每种类型的任务航线参数在执行任务前需要预先规划计算。任务航线规划是一种设计任务航线参数,优化任务航线的技术。静态规划和动态规划方法研究了机载预警雷达进入/退出任务区域的航路,面向任务需求规划航线以及分析任务航线对连续稳定探测区域、预警覆盖范围的影响。
任务航线规划是一个相对复杂的问题,其规划结果受到任务要求,目标环境以及用户需求等多种因素制约。虽然现有航线规划方法在一定程度上提高了机载预警雷达效能,但大多侧重于进出航线规划,或者在给定任务航线的基础上实施效能评估,很少关注于任务航线的计算,特别是关于机载预警雷达跑道形任务航线长度的计算鲜见公开文献。而跑道形航线是机载预警雷达的典型任务航线,因此,文中重点针对跑道形航线规划进行研究,从目标掌握稳定性、预警区域稳定探测宽度,以及覆盖范围需求等方面构建任务航线生成模型,分析其对任务航线规划的影响,为合理设计任务航线参数提供了参考。
1 问题提出
机载预警雷达跑道形航线DNPE 主要由直线和转弯两部分构成,如图1 所示。机载预警雷达沿着任务航线飞行时,预警探测范围随着载机空中位置的移动而不断变化。当任务航线较长时,虽然预警覆盖范围较大,但只能对部分区域保持连续不间断稳定覆盖。若航线较短时,稳定覆盖范围相对较大,但频繁转弯导致情报质量不稳定。而用户常要求既要能够大范围地预警覆盖,又要持续探测范围尽可能大,同时要满足稳定探测宽度,以及对目标掌握要尽可能地连续稳定。
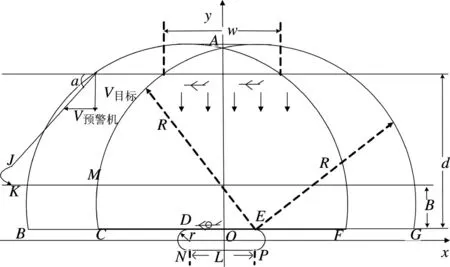
图1 载机往返飞行示意图
因此,结合用户需求,通过任务航线规划,科学合理性地设计任务航线参数,使得当机载预警雷达沿着任务航线往返飞行时,在巡逻周期内尽可能满足需求约束。
2 任务航线规划模型构建
任务航线规划是对机载预警雷达任务航线基本参数的科学计算,特别是任务航线直飞长度的计算。因此,针对机载预警雷达在实施任务航线规划过程中,涉及到预警覆盖范围、强效区以及目标掌握稳定性等关键问题,按照任务航线规划需求并遵循一定原则,构建任务航线规划模型,实现任务航线参数计算。
2.1 基于覆盖范围约束的航线规划模型

2.1.3 基于用户需求的任务航线计算
机载预警雷达总覆盖范围S和S强效区随着预警机任务航线长度L 改变而变化且相互制约。当任务航线L 变长时,总覆盖范围S变大而强效区S缩小。反之当任务航线L 变短时,总覆盖范围S变小而预警强效区S增大。因此,针对用户对尽可能大的覆盖范围和尽可能大强效区的需求,结合覆盖范围S和强效区S的定义,合适的任务航线选择需求模型可以转换为下式:

2.2 基于稳定探测宽度约束的航线规划模型
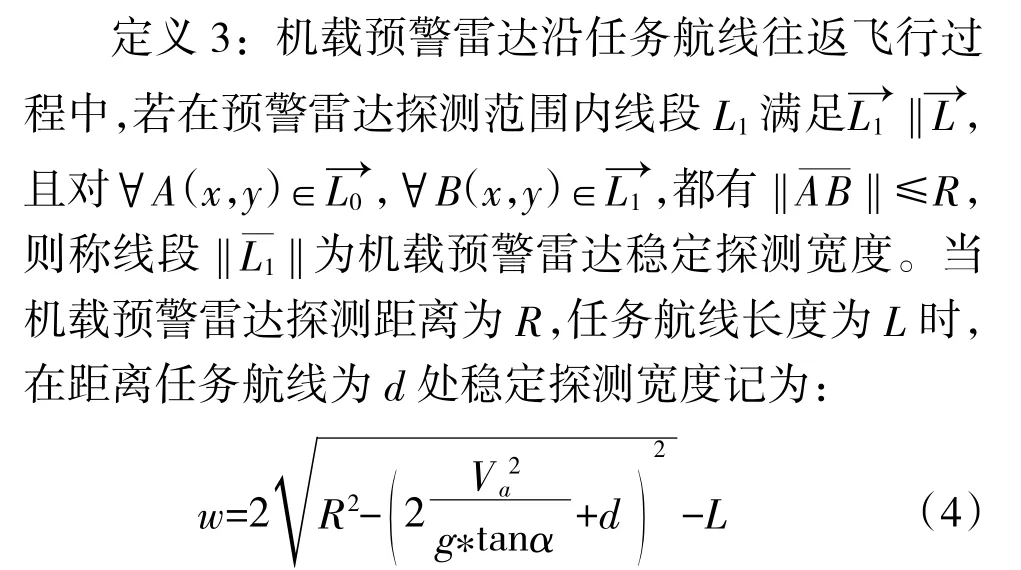
其中,α 为机载预警雷达转弯坡度。机载预警雷达稳定探测宽度反映了用户对目标来袭方向主要预警空域的关注。
2.3 基于目标掌握稳定性约束航线规划模型
机载预警雷达波束照射地(海)面产生杂波,强烈的地(海)杂波容易淹没目标,降低了目标检测概率,影响了目标探测发现效能。特别是当机载预警雷达沿着任务航线转弯时,雷达波束下压使得波束的擦地角增大,反射杂波增强,更加影响了雷达对目标检测。
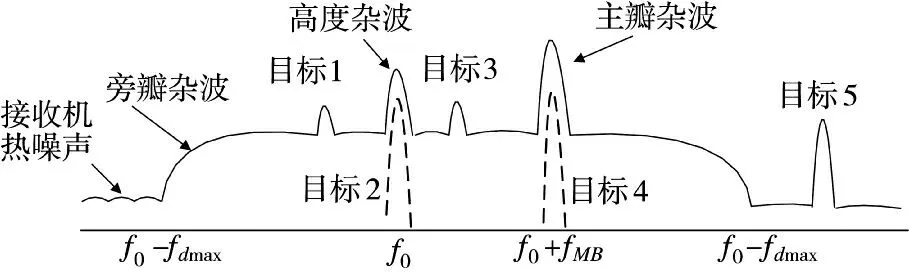
图2 机载预警雷达杂波与目标信号
2.3.1 机载预警雷达杂波计算
机载雷达普遍采用脉冲多普勒体制,在对目标实施探测时,雷达波束与地海面存在夹角即擦地角,由此产生地海面杂波,影响目标检测。擦地角越大,地海面杂波功率也越大,由此增加了目标检测难度。由于地海杂波的复杂性,用空间上的平均值来表征某地区的反射情况。
1)地杂波散射系数
雷达波束照射地海面后,单位面积反射特性常用地海面杂波散射系数σ表示,且σ受地表特征、雷达工作频率、擦地角等参数影响。考虑到机载预警雷达、环境以及擦地角范围较大,其地杂波散射系数σ计算模型常采用修正的Morchin 模型如下:

其中,ψ 为地形单元擦地角,在陆地上时,f为雷达的工作频率(单位为GHz),不同地形条件下A、B、σ以及β的取值,如表1 所示。
反观当下民族地区的寄宿生德育教育工作,仍然存在着德育教育不够被重视,灌输式教育方式单一、内容滞后,学生兴趣不高,效果不显、家校合力发挥不够,与教育信息化不相适应等问题。为此,笔者建议可以从以下几个方面改进突破,加强和创新民族地区寄宿生德育教育工作。

表1 反射系数参数
2)海杂波散射系数
当机载预警雷达在海上探测目标,雷达波束照射海面后海杂波散射系数σ计算如下:
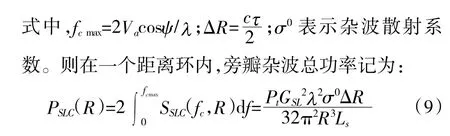
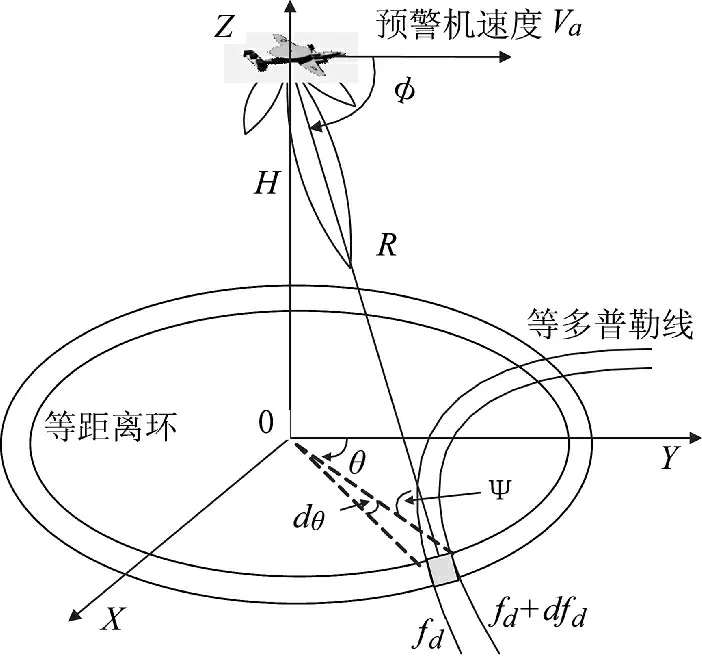
图3 机载预警雷达杂波计算示意图
机载预警雷达在杂波环境下检测目标时,由于采取PRF 不同,使得在距离或者频域上存在重叠,甚至同时在距离和频域上存在重叠。
旁瓣杂波在距离上产生重叠。设R为杂波照射最远处,H 为载机高度,则脉冲重复频率为f时等距离环重叠次数为:


2)目标掌握稳定性
机载预警雷达沿着任务航线直线飞行时杂波较小,而在转弯时雷达波束下压导致波束擦地角增大,反射杂波增强。因此,结合直线飞行时旁瓣杂波和转弯时旁瓣杂波情况,机载预警雷达沿着任务航线往返飞行过程中对目标掌握的稳定性记为:

2.4 基于多元约束的任务航线规划模型

其中,式(a)表示机载预警雷达沿着任务航线往返飞行时,对预警区域内N 批目标掌握稳定性不低于P;式(b)表示对前沿距离为d 预警区域稳定探测宽度至少满足w;式(c)反映了用户对总覆盖范围S和S强效区的综合需求。
3 案例分析
3.1 仿真环境设置

3.2 任务航线仿真计算
仿真条件:R=400 km,V=550 km/h,V/V=1,α=8°,H=10 000 km,w=300 km,目标掌握稳定性P 下降20%以内。
仿真分析:图4 表示机载预警雷达在沙漠、农田、丘陵、高山以及海面等5 种地形条件下探测目标时,在规定稳定性要求下,机载预警雷达在海上探测目标时所需最小任务航线长度最小,大约为24 km,依次为丘陵、农田和沙漠,而高山地形条件下地杂波较强,载机转弯时雷达波束向下产生杂波较强,使得目标易被强杂波淹没。为达到相应稳定性要求,任务航线最小长度相应较大,约为海上条件下3 倍,达到72.4 km。由此,任务航线需要根据地形条件合理灵活设置。

图4 不同地形条件下巡逻航线
3.3 任务航线规划分析
1)直飞速度V与转弯速度V分析
仿真条件:R=400 km,α=3°,H=10 000 m,V=550 km/h,d=300 km,目标掌握稳定性P 下降20%以内,地形条件为沙漠和丘陵两类。
仿真分析:图5 表示机载预警雷达在沙漠、丘陵环境下探测目标时,任务航线最小长度随着V/V的增大而逐渐变大,而最大长度随着V/V增大而逐渐变小。特别是当V/V小于某个值时,任务航线最佳取值保持稳定,随后逐渐减小。如对w=300 km,当V/V<0.99 时,任务航线长度最佳取值为127 km;而对w=250 km,当V/V<1.07 时,由于总覆盖范围和强效区因素制约,任务航线长度最佳取值保持127 km 不变,且随后均逐渐减小。
图5 直飞速度与转弯速度之比对任务航线的影响
2)转弯坡度对L 的影响
仿真条件:R=400 km,V=550 km/h,V/V=1,H=10 000 m,d=300 km,w=300 km,目标掌握稳定性P 下降20%以内,地形条件为沙漠和丘陵两类。
仿真分析:图6 表示机载预警雷达在沙漠、丘陵地带探测目标时,任务航线最小、最大长度值随着α 的增大而逐渐变大,但由于总覆盖范围和强效区因素制约,使得当α≥4 时最佳任务航线长度取值约为137 km 且保持不变。

图6 转弯坡度对任务航线的影响
3)目标掌握稳定性需求P 对L 的影响
仿真条件:R=400 km,V=550 km/h,V/V=1,H=10 000 m,d=300 km,α=8°,w=300 km 地形条件为沙漠和丘陵两类。
仿真分析:图7 表示机载预警雷达在沙漠、丘陵地带探测目标时,任务航线最佳取值与稳定性要求紧密相关。在上述仿真条件下,当P<0.9 时,任务航线最佳取值取决于用户对总覆盖范围S和强效区S的需求。对沙漠地带,当P 介于0.9~0.945 时,任务航线最佳取值取决于掌握稳定性需求,而当P>0.945 时,任务航线最佳取值受制于预警区域稳定探测宽度要求。对丘陵地带,当P 介于0.9~0.93时,任务航线最佳取值取决于掌握稳定性需求,而当P>0.93 时,任务航线最佳取值取决于预警区域稳定探测宽度要求。
图7 目标稳定性需求对任务航线的影响
4 结论
机载预警雷达任务航线规划是提升预警探测效能发挥的关键,本文构建了基于多元约束的机载预警雷达任务航线规划模型。针对杂波环境以及雷达波束俯仰指向对探测性能的影响,综合考虑巡逻周期内探测效能,构建基于目标掌握稳定性约束的任务航线规划模型,针对任务及用户需求,分别构建基于预警区域稳定探测宽度约束、覆盖范围约束的任务航线规划模型。最后仿真计算分析表明该任务航线规划方法为合理设计任务航线提供了科学依据。
