基于RSSI 测距的凸半定规划节点定位算法*
2022-07-25杨青
杨 青
(驻马店职业技术学院信息工程系,河南 驻马店 463000)
0 引言
无线传感网络(wireless sensor networks,WSNs)已在精准农业、森林防火、动物跟踪等领域广泛使用。节点的位置信息是传感器网络具体应用的重要前提。在多数应用中,节点必须获取自身的位置信息,缺乏位置信息的节点监测数据是没有应用价值的。
估计未知节点位置有3 个步骤:1)测量信号参数,如:到达时间、到达角度,利用这些信号参数转换成定位参数;2)利用定位参数,结合定位算法估计节点位置;3)利用定位算法校正位置估计,提高定位精度。
尽管全球定位系统(global positioning system,GPS)是解决多数定位问题的常用策略,但是考虑到成本和能耗问题,利用GPS 系统估计WSNs 中节点位置的可操作性低。因此,先在网络内部署一些已知位置的节点(锚节点),再利用锚节点与未知节点(源节点)间的测距数据,并结合定位算法估计未知节点位置。
目前存在多种方式测距,例如:到达时间(time of arrival,ToA)、到达时间差(time difference of arrival,TDoA)、到达角度(angle of arrival,AoA)和接收信号强度指标(received signal strength indicator,RSSI)。相比于ToA、TDoA 和AoA,RSSI 测距无需额外的硬件设施,易实施。因此,基于RSSI 测距的定位算法受到广泛关注。先利用RSSI 测距数据建立定位方程,再利用优化算法求解,进而实现对节点位置的估计。
现多数RSSI 定位算法将定位方程转化为最大似然(maximum likelihood,ML)估计优化问题。目前,研究人员针对优化问题,提出了不同的算法。例如,文献[5]采用牛顿迭代法求解ML 优化问题,然而,ML 优化问题等式存在较高的非线性和非凸性,传统的循环迭代法求解ML 优化问题的误差较大,难以获得全局最优解。文献[7]将ML 优化问题转化为半定规划(semi-definite programming,SDP)问题,进而提高定位精度,但是该算法的鲁棒性差。类似地,文献[8-9]先对ML 优化问题进行近似处理,再利用二阶锥规划(second order cone programming,SOCP)求解。然而,该算法存在一个不足:源节点位于凸集外时,定位误差很大。
为此,提出基于接收信号强度测距的凸半定规划节点定位算法RCSP。RCSP 算法先建立基于ML 的定位方程,并利用最优化理论对定位方程近似处理,进而形成SDP 优化问题,最终利用内点法求解源节点位置。仿真结果表明,提出的RCSP 算法的定位精度逼近于克罗下界(cramer rao lower bound,CRLB)。
1 问题描述
网络有N 个锚节点和一个源节点。令s表示第i 个锚节点,其位置表示为X,用X 表示源节点位置。所有锚节点位置已知,源节点位置未知,需估计。
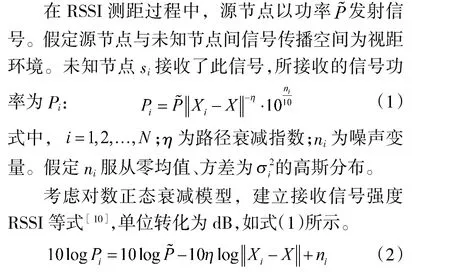
依据式(2)可以计算N 个锚节点所接收的RSSI值的条件概率密度函数:

2 基于SDP 松驰定位算法
由于式(4)是非线性和非凸性,对其进行处理,再利用SDP 求解。根据最优化理论,在式(4)右边乘以一个正数不会改变最优解。为此,先将式(4)转化为:

依据泰勒级数近似理论(taylor series approxima-
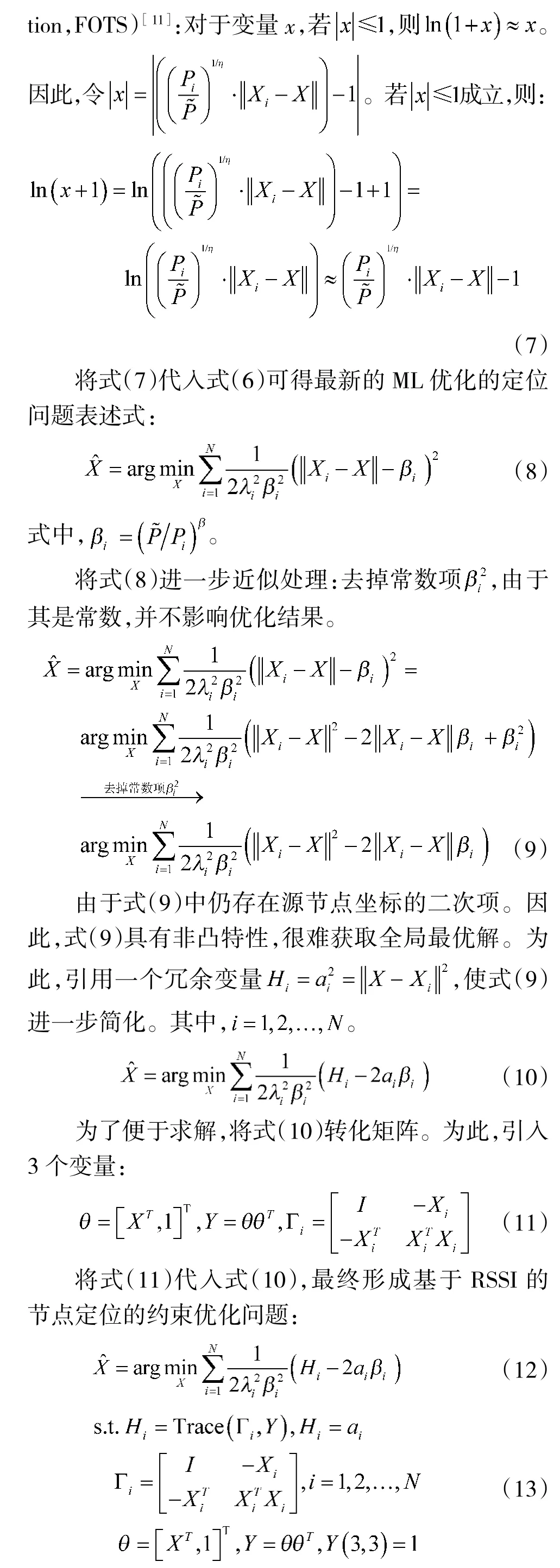
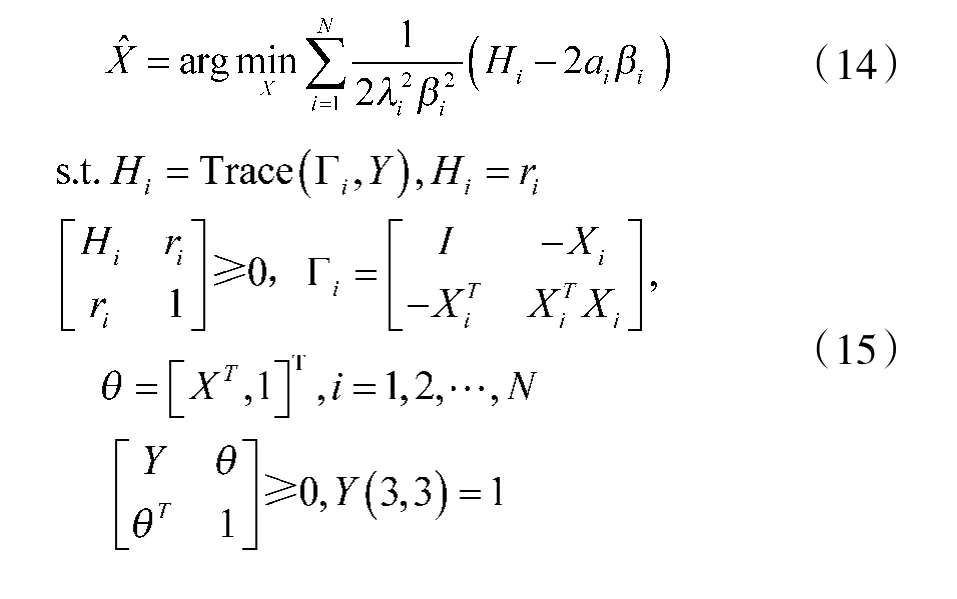
再将式(12)、式(13)转换成SDP 凸优化问题:
3 基于内点法的优化问题求解
为了求解式(14)、式(15)所示的不等式约束的优化问题,采用基于内点法的约束优化算法求解。内点法的思想为:在可行域的边界构成一道很高的“围墙”,当迭代点靠近“围墙”,目标函数(优化问题函数)就快速增大,增加惩罚,阻止迭代点穿越“围墙”,进而将最优解保留在可行域之内。基于内点法的求解步骤如算法1 所示。

?
4 性能分析
4.1 仿真参数及性能指标
利用MATLAB 软件建立仿真平台,对RCSP 算法进行M=1 000 次蒙特卡洛仿真试验。N 个锚节点随机分布在半径为20 m 的圆内,一个源节点随机分布在20 m×20 m 的正方形内(源节点位于锚节点凸集内),路径衰减指数η=3,所有节点的通信半径为R。
为了更好地分析RCSP 算法的性能,选择UT-WSL、SDP和SOCP2 算法作为参照,如下页表1 所示。并分析定位算法的归一化均方根误差性能(normalized root mean square error,NRMSE):

表1 算法概述
除了算法的定位精度(NRMSE),算法的复杂度也是衡量定位算法性能的重要指标。为此,依据文献[14]提出计算算法的复杂度公式,分析RCSP 算法的复杂度。
4.2 CRLB 性能
CRLB 是衡量定位算法性能的重要指标。令F表示费舍尔信息矩阵:

4.3 性能分析
首先分析噪声方差σ 对NRMSE 的影响,σ 从1 dB~5 dB 变化,如图1 所示,其中,N=8。假定,σ=σ,i=1,2,…,N。

图1 NRMSE 随噪声标准差σ 变化情况
由图1 可知,噪声标准差σ 的增加提升了NRMSE,增加定位误差。原因在于:σ 越大,噪声干扰越大,加大了RSSI 扰动值的比例,这必然增加定位误差。相比于UT-WSL、SDP 和SOCP2 算法,RCSP 算法的NRMSE 最低,定位精度最高,与CRLB相近。例如,当σ=2 dB 时,SOCP2 算法的NRMSE 低于UT-WSL 和SDP 的NRMSE 值,但是它比RCSP算法的NRMSE 值仍高了约0.4 m。
如图2 所示,分析锚节点数对NRMSE 的影响,其中σ=4 dB,N 从2~16 变化。由图2 可知,锚节点数的增加使各算法的NRMSE 呈下降趋势。原因在于:锚节点数越多,源节点获取的测距信息越多,定位精度越高。相比于UT-WLS 算法、SDP 算法和SOCP2 算法,RCSP 算法的NRMSE 得到有效降低。例如,当N=16 时,RCSP 算法的NRMSE 比UT-WLS算法、SDP 算法和SOCP2 算法分别下降了0.8 m、2.2 m 和1.4 m。

图2 NRMSE 随锚节点数变化情况
表2 显示了UT-WLS 算法、SDP 算法和SOCP2算法的复杂度。由表2 可知,RCSP 算法与SDP 的复杂度相同,但是比UT-WLS 算法的复杂度略高。由图1 和图2 可知,RCSP 算法的NRMSE 最低,换而言之,RCSP 算法以略高的复杂度换取高的定位精度。
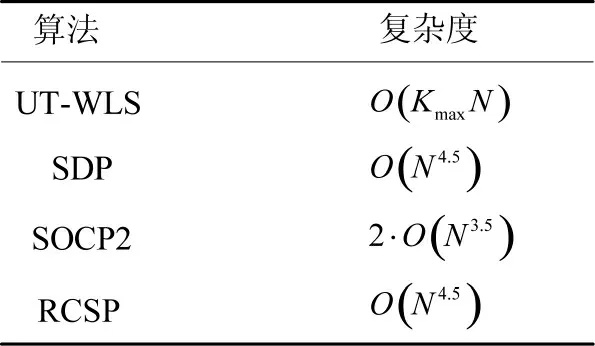
表2 算法的复杂度
5 结论
针对WSNs 的节点定位问题,提出基于接收信号强度测距的凸半定规划节点定位算法RCSP。RCSP 算法利用RSSI 测距,再建立基于ML 估计的定位方程。通过转换处理,使定位方程转换成SDP形式,最终利用内点法求解。性能分析表明,相比于SDP 和UT-WSL 算法,RCSP 算法降低了定位误差。后期将进一步优化RCSP 算法,降低算法的复杂度,并拓展到真实环境场景。