基于梯度神经网络的轮式移动机械臂轨迹跟踪控制方法
2022-07-23许春玲孙颖异
许春玲,孙颖异
(1.长春人文学院公共计算机教研部,吉林 长春 130117;2.吉林农业大学经济管理学院,吉林 长春 130118)
0 引言
近年来,移动机械臂在工业、农业、医疗服务、地质调查、灾害救援等领域得到了广泛应用[1-3].根据移动机械臂运行模式,可以将其划分为4种类型:轮式移动机械臂、履带式移动机械臂、腿式移动机械臂和混合式移动机械臂.结合任务实际需求和运行工况,上述4种移动机械臂均能在各自领域发挥自己长处,顺利完成分配任务.由于轮式移动机械臂具有结构灵活、工作空间范围广、便于控制等优点,受到了学者们的广泛关注[4-5],其中,轮式移动机械臂的轨迹跟踪控制问题始终是移动机械臂研究的热点和难点问题.
从数学角度出发,轮式移动机械臂的轨迹跟踪控制问题可以通过适当逼近技术转化为时变逆运动求解问题,即求解一类非线性时变问题[6-7].针对非线性时变问题,学者们提出了许多算法进行数值求解,例如:静态优化算法[8-9]和神经网络算法[10-11].针对静态优化算法,由于算法设计过程中没有考虑时间信息,因此这类算法适合时不变非线性问题求解,对于时变非线性问题求解存在误差大、效率低等缺陷,不符合实际工程求解要求,因此该算法泛化能力较差.一般地,神经网络算法具有并行处理问题能力,极大地提高了算法的计算效率,得到了学者们的青睐[12-13].以负梯度信息构建的梯度神经网络具有较好的收敛性能,在许多实际问题求解过程中发挥着重要作用.Zhang等[14]基于梯度下降思想设计了常数矩阵求解算法,而对于时变矩阵问题求解则是构建了梯度神经网络,通过严格的理论分析,证明了该类网络具有渐近收敛性.
针对移动机械臂轨迹跟踪控制问题,Dong等[15]利用径向基函数神经网络对外部干扰进行补偿,基于滑模控制方法设计控制器解决了轨迹跟踪问题.针对具有参数和非参数不确定性的动态系统问题,Li等[16]提出一种鲁棒自适应控制器,利用自适应控制技术补偿参数不确定性,并采用滑模控制抑制有界干扰.针对系统存在的不确定性和扰动,Zhao等[17]提出一种鲁棒控制策略解决轨迹跟踪问题.但是该算法在实际应用中不能保证实时性.对具有非线性、非完整约束和不确定性的移动机械臂,Qiu等[18]在控制器设计过程中引入了集成反馈技术,以减小系统的轨迹跟踪误差.传统控制算法需要建立动力学模型,在模型建立上比运动学模型复杂.
针对轮式移动机械臂轨迹跟踪控制问题,本文构建了轮式移动机械臂运动学数学模型,设计了一类梯度神经网络控制器,考虑了无噪声和有噪声两种工况,仿真结果验证了算法的可行性、有效性和优越性,为轮式移动机械臂实际应用奠定算法框架.
1 轮式移动机械臂运动学模型构建
轮式移动机械臂是由移动平台和机械臂两个主要部件构成,其中机械臂是一类四自由度的开链结构,4个关节均为转动关节;移动平台为四轮独立驱动的移动平台,如图1所示.为了描述轮式移动机械臂运动学数学模型,需要确定机械臂各个连杆间的相对位置和方向以及机械臂与移动平台相对位置和方向,建立的坐标系如图2所示.

图1 轮式移动机械臂模型

图2 移动平台俯视图及相关参数
轮式移动机械臂4个连杆采用4个运动学参数变量描述,其中2个参数变量代表连杆本身,2个参数变量代表连杆之间连接关系.根据Denavit-Hartenberg(D-H)方法建立轮式移动机械臂运动学模型,这里θi(i=1,2,3,4)代表机械臂关节角位移;ψi(i=1,2,3,4)代表移动平台的4个轮子旋转角度.机械臂各个构件单元具体参数变量如表1所示.根据D-H法可以得出机械臂各个关节角的角位移和连杆之间旋转关系,从而得出机械臂整体姿态与位置[19],表达式
f(ϖ)=rb.
(1)
其中:ϖ为机械臂各个关节末端位置,rb为矢量方向,f(·)为非线性映射算子.
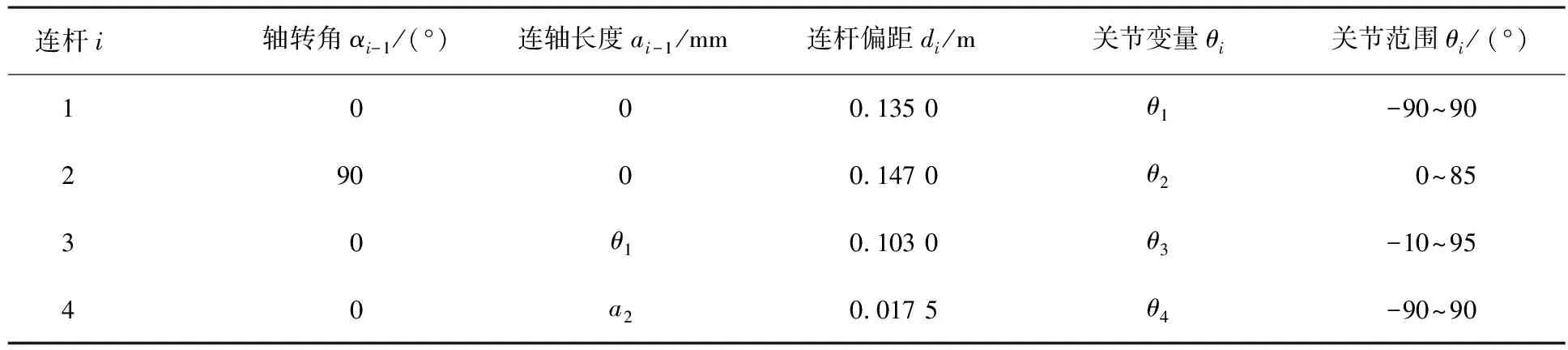
表1 各个变量取值范围
考虑移动平台为非完整约束情况,从而轮式移动机械臂的两个子系统均属于刚性系统,其仅在XOY平面内运动.此外,为了简化问题复杂程度,不考虑移动平台侧滑情况,同时要求移动平台4个轮子的速度严格垂直于传动轴,移动平台各个构件单元参数变量如表2所示.

表2 移动平台的参数
根据上述假设条件,结合移动平台各个构件单元间的几何关系,建立运动学表达式
(2)
进一步有:
利用变换矩阵将运动方程从基坐标系转化为世界坐标系,并将机械臂末端执行器的位置方程与世界坐标系联立,轮式移动机械臂的机械臂部分的全局运动学方程即为机器臂在世界坐标系中末端位置的运动学方程.通过对时间t进行求导计算,得到移动机器臂在世界坐标系下运动学方程
(3)
其中
将上式关于时间t求导,可以得到全局坐标系下轮式移动机械臂的运动学方程
(4)
其中

经简化后得到轮式移动机械臂的运动学方程
(5)
其中:
令q=[ψ,ϖT]T代表轮式移动机械臂的角度向量,其中包括移动平台的轮子转动角度和机械臂各关节的转动角度,从而得到等式:
(6)
其中I为单位矩阵.系数矩阵G定义为

为了方便,轮式移动机械臂的全局运动学模型转化为
zd=δ(q,t).
(7)
因此,轮式移动机械臂轨迹跟踪问题可以转化为时变矩阵方程求解问题,可以通过设计求解矩阵方程的算法设计轮式移动机械臂轨迹跟踪控制器.
2 梯度神经网络控制器设计
时变矩阵方程组求解问题是在实际工程中普遍存在的问题.许多实际问题都可以通过适当逼近技术转化为时变矩阵方程组问题,因此时变矩阵方程组求解变得尤为重要.一般地,矩阵方程组求解方法可以划分为两类:时不变矩阵方程组求解方法;时变矩阵方程组求解方法.求解时不变矩阵方程组问题可以通过数字计算机进行串行算法计算,这种方法对于时不变矩阵方程组求解非常有效.对于时变矩阵方程组求解问题,提出了并行计算算法,例如,神经网络方法.从理论角度分析,它可以高效地求解时变矩阵方程组问题.因此,本文提出了一种梯度神经网络方法求解轮式移动机械臂轨迹跟踪控制问题,其本质上是求解时变矩阵方程组问题.
轮式移动机械臂轨迹跟踪控制问题可以转化为时变矩阵方程组求解问题.定义时变误差函数
(8)
当t→∞时,ε(t)→0,从而zd→δ(q,t).实际上,上述误差函数可用适当逼近技术转化为时变矩阵方程组
A(t)X(t)-I=0.
其中:A(t)代表误差函数时变系数矩阵,X(t)代表时变未知矩阵,I为单位矩阵.

(9)
其中γ为正常数,可以用来调节梯度神经动力系统的收敛速率.将误差函数ε(t)代入梯度神经动力系统,从而得到梯度神经网络
(10)
定理2.1[20]考虑非奇异时变矩阵A(t)∈Rn×n,设定初始状态X(0)=X0∈Rn×n,则梯度神经网络全局指数收敛到理论解X*(t)∈Rn×n.
3 数值仿真实验
为了验证本文提出的梯度神经网络控制算法的可行性和有效性,将程序代码在Matlab 7.1环境下运行,选用CPU为奔腾(R),2.19 GHz,1 GB内存.在轮式移动机械臂可达空间范围内,设定移动平台4个轮子的期望轨迹和机械臂的期望轨迹,通过仿真实验验证本文算法能否确保轮式移动机械臂末端执行器跟踪期望轨迹.轮式移动机械臂的末端执行器跟随期望轨迹变量的初始状态:
α(0)=xd(0)=yd(0)=0,γ=1 000.
3.1 无噪声干扰情况
在无噪声干扰情况下,为了实现轮式移动机械臂轨迹跟踪控制,根据梯度神经网络控制器设定梯度神经网络参数为γ=1 000,仿真时间为70 s,轮式移动机械臂跟踪轨迹为类“8”字形运动轨迹,仿真结果如图3—6所示.图3为无噪声情况下轮式移动机械臂跟踪轨迹3维图和俯视图;图4为无噪声情况下轮式移动机械臂位置误差及其误差变化率.数值结果表明,本文提出的梯度神经网络控制器能够较好地实现轮式移动机械臂的轨迹跟踪控制.从图3和图4可知,梯度神经网络控制器迅速实现轮式移动机械臂位置跟踪误差趋近于0,实现了轨迹跟踪控制,系统迅速达到稳定状态.

图3 在无噪声情况下轮式移动机械臂跟踪轨迹3维图

图4 在无噪声情况下轮式移动机械臂位置误差及误差变化率

图5 在无噪声情况下的位置跟踪误差

图6 在无噪声情况下位置误差变化率
在无噪声情况下,由图5可知,梯度神经网络控制器实现了轮式移动机械臂位置跟踪误差的快速收敛,验证了控制器的可行性和有效性.图6为轮式移动机械臂在x轴、y轴和z轴上速度误差变化情况.根据曲线变化情况可知,梯度神经网络控制器能够保证轮式移动机械臂在实际工况下良好运行,算法证明了梯度神经网络控制器能够完成轨迹跟踪任务.从图6可知,梯度神经网络控制器对位置误差变化率控制不是十分理想.通过对程序运行结果的图像进行局部放大分析发现误差变化率存在震荡现象,导致这一现象发生的原因可能是末端执行器位置误差变化率由差分形式计算得到,从而造成差分过程中累积误差出现,使得末端执行器速率变化不能够较好地实现稳定控制.因此在后续控制器设计中,应充分考虑末端执行器速率变化控制,避免震荡现象的发生.另外,轮式移动机械臂在实际应用过程中,应重点考察位置误差和误差变化率两个指标,因此高精度控制算法变得尤为重要.一方面,本文提出的梯度神经网络控制器实现了较高精度轮式移动机械臂位置误差变化,误差变化小于10-4;另一方面,从图5可知误差变化率小于10-2,说明了该算法可以应用于轮式移动机械臂实际平台.
图7—8为无噪声情况下机械臂关节角度和角速度曲线图,验证了机械臂能够实现稳定的轨迹跟踪控制,即移动平台和机械臂的各个关节角能保持协调运动,为后续机械臂抓取任务的顺利完成奠定算法框架.从图7可知,结合梯度神经网络控制器,机械臂4个关节角均能实现稳定运动,由于机械臂是一个四自由度的连杆机构,在机械臂运动初期,机械臂末端关节需要摆动较大角度才能实现稳定运动,符合连杆机构运动特性.由图8知,在无噪声干扰情况下,机械臂各关节角的角速度在较短时间内实现了稳定运动,机械臂末端关节角速度稳定性最好.另外,从图形可知机械臂各个关节角速度为零,证明了轮式移动机械臂实现了稳定的轨迹跟踪任务.
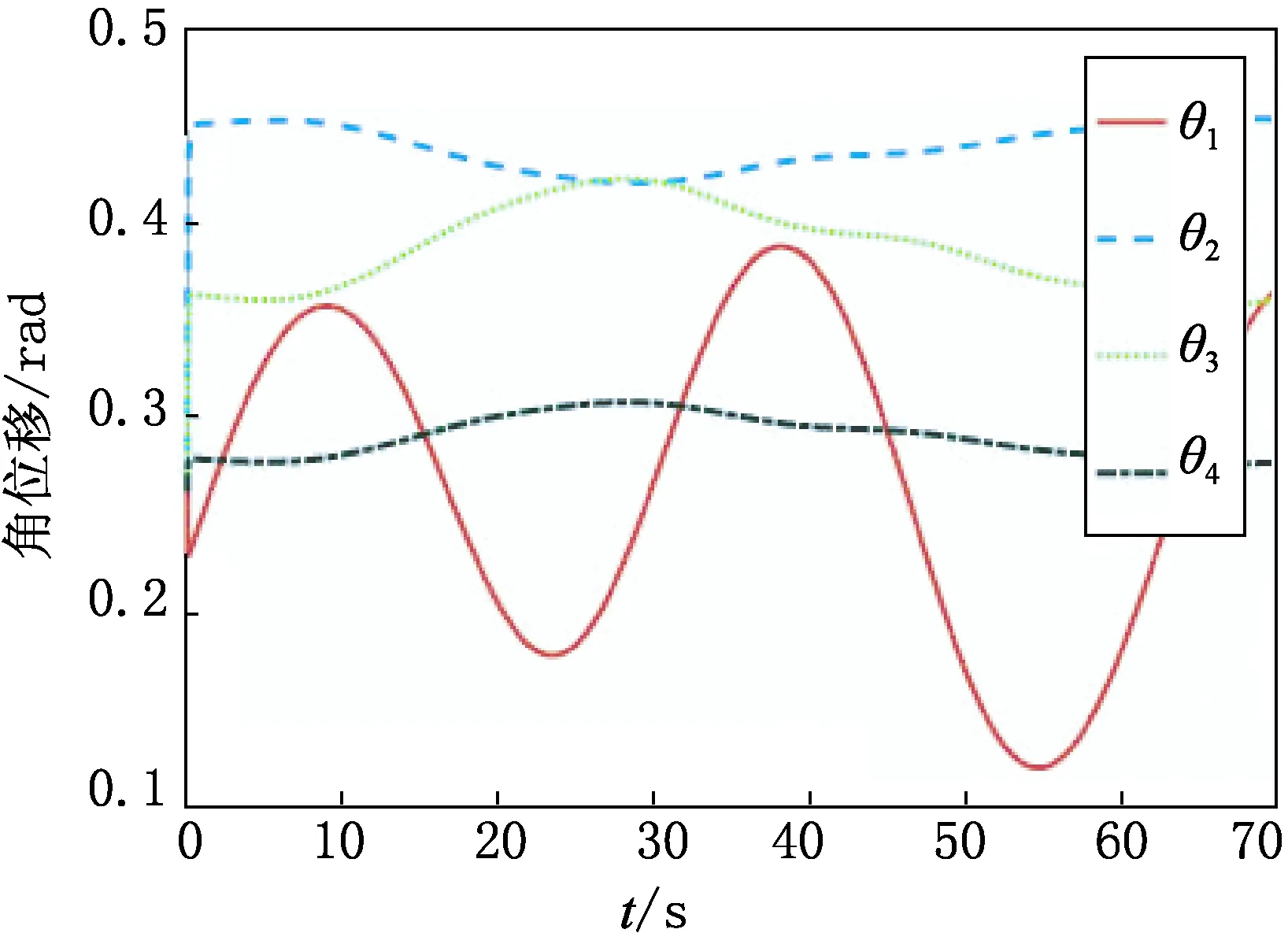
图7 在无噪声情况下关节角位移曲线

图8 在无噪声情况下关节角速度曲线
图9—10为无噪声情况下移动平台角度和角速度曲线图.从图9可知:本文提出的梯度神经网络控制器能够较好控制移动平台实现稳定运动;根据本文设计梯度神经网络控制器,移动平台4个轮子的角位移均能实现稳定运动;由于移动平台由四转动自由度的轮子构成,在建模过程中,假设后面2个轮子从动于前面2个轮子,因此,后面2个轮子的角度轨迹是重合的,符合从动假设条件.由图10可知,在不考虑噪声情况下,移动平台各个轮子角速度在较短时间内迅速实现了稳定运动.因此,利用梯度神经网络控制模型求解轮式移动机械臂的时变逆运动问题可以实现精确控制的目的,再次证明了移动平台和机械臂的各个关节角和轮子旋转角度能保持协调运动.

图9 在无噪声情况下车轮角度跟踪轨迹

图10 在无噪声情况下车轮角速度跟踪轨迹
在无噪声干扰情况下,轮式移动机械臂采用本文提出的梯度神经网络控制器进行轨迹跟踪,结果证明跟踪效果良好,误差在接受范围之内.轮式移动机械臂运动学模型中机械臂的关节角度和角速度、移动平台车轮的角度和角速度均能迅速收敛到稳定状态,实现了轮式移动机械臂的稳定控制.
3.2 噪声干扰情况
在许多科学和工程研究领域中,噪声经常出现,尤其是在实际工况环境下,噪声是不可避免的.例如:在科学与计算领域,舍入误差、阶段误差、模型近似、数值逼近等都可以看作为噪声;在实际工程应用领域,电磁干扰、误差信号、环境因素、物理模型参数扰动等会产生不可控制的噪声.当系统受到噪声干扰时,容易破坏系统稳定性,从而使系统无法完成所分配的任务,因此噪声抑制成为控制器设计的关键.本文提出的梯度神经网络控制器将有效抑制噪声,实现轮式移动机械臂稳定运动的目标.
在实际工况运行过程中,轮式移动机械臂易受到外部扰动、电磁干扰、信号误差和参数摄动等因素的影响,这些因素可以作为噪声伴随在轮式移动机械臂系统运动过程中,因此,本文假设噪声信号
N=[0.6sin(3t) 0.6sin(3t) 0.6sin(3t)]T.
梯度神经网络控制器参数设定不变,假设参数γ=1 000,仿真时间为70 s,轮式移动机械臂跟踪轨迹为类“8”字形运动轨迹,仿真结果如图11—14所示.
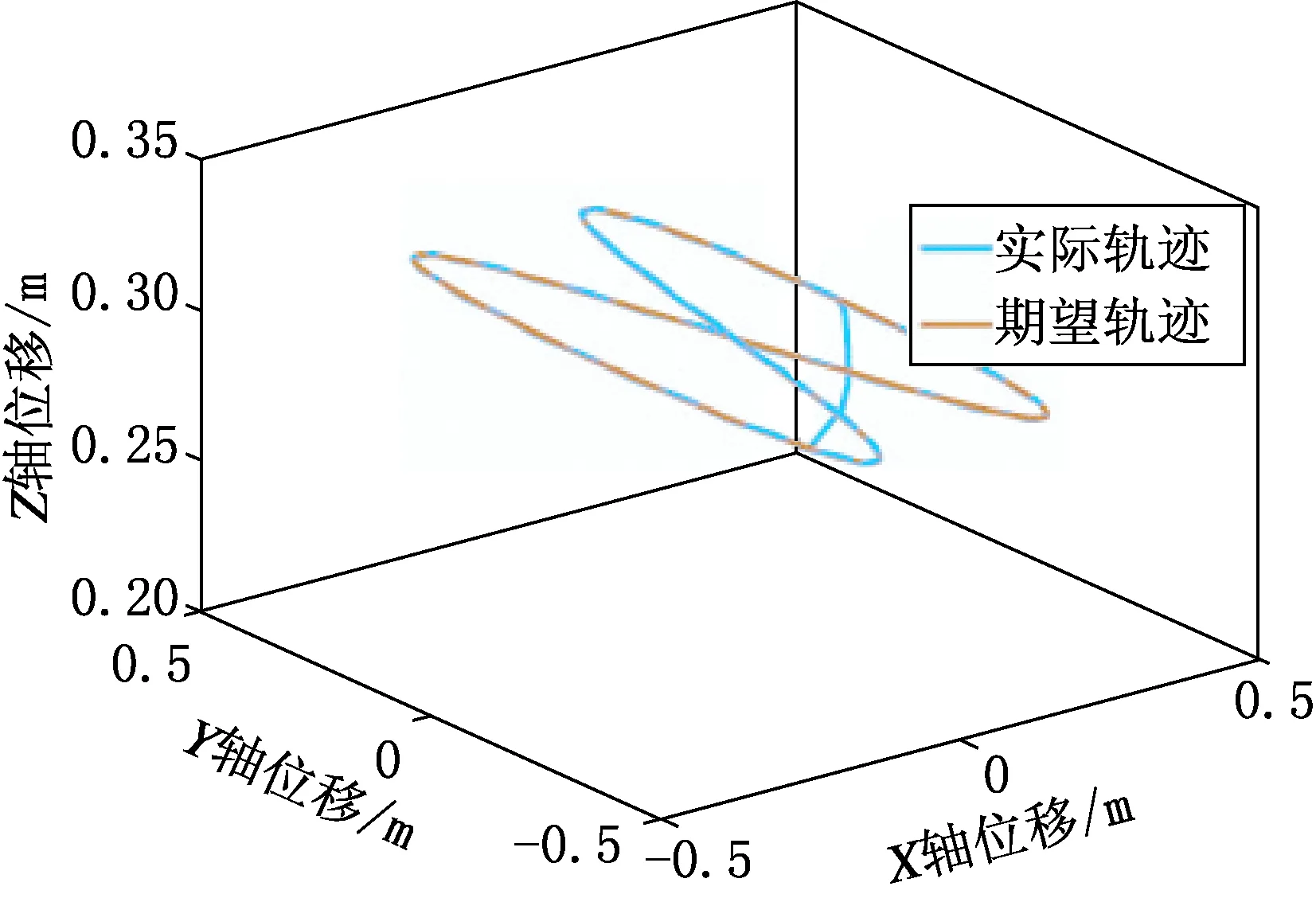
图11 在噪声情况下轮式移动机械臂跟踪转变3维图

图12 在噪声情况下轮式移动机械臂位置误差与误差变化率
图11为噪声情况下轮式移动机械臂跟踪轨迹三维图和俯视图,图12为噪声情况下轮式移动机械臂位置误差及其误差变化率.在噪声干扰情况下,数值结果表明本文提出梯度神经网络控制器能够较好抑制噪声干扰,实现轮式移动机械臂的轨迹跟踪控制.从图11可知,轮式移动机械臂有效地跟踪了“8”字形期望运动轨迹,在“8”字形期望运动轨迹中存在4处转弯路径,一般情况下,轮式移动机械臂在运动到转弯处时需要实时调整移动平台4个轮子,跟踪期望运动轨迹.但是,如果在转弯处控制器不能进行有效控制,轮式移动机械臂将不能有效跟踪期望运动轨迹,因此本文在梯度神经网络控制器调节下,轮式移动机械臂实现了稳定运动.

图13 在噪声情况下位置跟踪误差

图14 在噪声情况下位置误差变化率
由图13可知,在噪声干扰情况下,梯度神经网络控制器仍能有效控制轮式移动机械臂,实现了位置跟踪,有效地抑制了噪声干扰,说明了本文提出的梯度神经网络控制器的有效性和优越性.图14表示轮式移动机械臂在噪声干扰情况下,移动平台在x轴、y轴和z轴上误差变化率,从图14曲线变化情况可知,梯度神经网络控制器能够在较短时间内实现误差变化率的稳定控制,确保了轮式移动机械臂在噪声干扰工况下仍然能够进行稳定运行,验证了梯度神经网络控制器能够有效抑制噪声干扰,从而实现轨迹跟踪的任务.在噪声干扰情况下,本文提出的梯度神经网络控制器迅速实现轮式移动机械臂位置跟踪误差趋近于0,位置误差变化率迅速收敛到0,这表明梯度神经网络控制器有效抑制了噪声干扰,实现了移动平台和机械臂的轨迹跟踪控制,从而使得轮式移动机械臂达到稳定状态.
在噪声干扰情况下,图15—16为轮式移动机械臂各个关节角度和角速度曲线图.从图15中可知,虽然轮式移动机械臂系统存在噪声干扰,但是机械臂在梯度神经网络控制器调节下能够实现稳定运动.图15表明,机械臂末端需要根据机械臂前3个连杆机构运动情况进行调整,从而使机械臂末端关节摆动较大.机械臂末端实现精准控制对轮式移动机械臂系统实际工程应用具有十分重要的意义,如轮式移动机械臂抓取任务.在实际工况环境下,噪声干扰会破坏轮式移动机械臂系统的稳定运动,从而导致轮式移动机械臂任务失败.图16为机械臂各个关节角速度变化情况,系统运行初期误差变化较大,但在较短时间内,机械臂各个关节角速度趋近于0,说明了梯度神经网络控制器在噪声干扰情况下也能够快速收敛,实现了稳定运动.因此,梯度神经网络控制器实现了轮式移动机械臂轨迹跟踪,具有较好的噪声抑制能力,说明了本文控制算法具有可行性、有效性和优越性.图16仿真结果表明,梯度神经网络控制器能够很好地完成轨迹跟踪任务.在仿真实验过程中,机械臂各个关节角度位置误差较大时,轮式移动机械臂并没有出现明显抖振现象,因此梯度神经网络控制器可以确保其平稳运行.另外,在轮式移动机械臂系统受到噪声干扰情况下,机械臂末端执行器的实际运动轨迹完美地跟踪了期望轨迹,再次表明了本文提出的梯度神经网络控制器成功地实现了轨迹跟踪任务.

图15 在噪声情况下关节角位移曲线

图16 在噪声情况下关节角速度曲线
在噪声干扰情况下,机械臂关节角度变化较大,但是移动平台和机械臂仍然能够保持协调运动,确保完成轨迹跟踪任务.图17—18为移动平台车轮的角度和角速度曲线变化图.与无噪声的情况对比,移动平台的轨迹跟踪角变化不大,角速度波动变大,调节时间变长.因此,利用梯度神经网络控制器实现了轮式移动机械臂的抗干扰控制.

图17 在噪声情况下车轮角度曲线
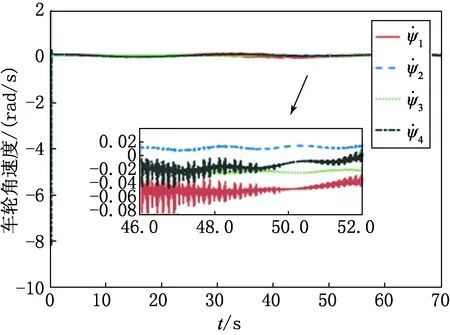
图18 在噪声情况下车轮角速度
本文提出的梯度神经网络控制器能够实现期望轨迹跟踪,并且跟踪效果良好,验证了梯度神经网络控制器的强抗干扰能力.结合梯度神经网络控制器,虽然跟踪误差变大,调节时间变长,但是系统随着时间增加趋于稳定,仿真结果表明本文提出的梯度神经网络控制器在噪声抑制方面是可行的和有效的.另外,轮式移动机械臂各个关节角度和关节角速度、移动平台车轮的转动角度和角速度均能收敛于期望角度和角速度,体现了梯度神经网络控制器在轮式移动机械臂轨迹跟踪控制的优越性和有效性,同时拥有较强的抗干扰能力.虽然使用该控制器不能完全消除噪声干扰,但其控制噪声干扰、保证系统正常运行的作用非常明显.
4 总结
针对轮式移动机械臂的轨迹跟踪控制问题,本文提出了移动平台和机械臂一体化运动学数学模型,设计了一类梯度神经网络控制器,同时将轨迹跟踪控制问题转化为矩阵方程求解问题.结合梯度神经网络模型,在无噪声干扰下,梯度神经网络控制器实现了轮式移动机械臂的轨迹跟踪控制,为轮式移动机械臂工程实践奠定了理论基础和算法框架;在考虑到实际工况中噪声无处不在,而且不可避免,本文提出的梯度神经网络控制器能够有效地抑制噪声干扰.数值实验表明了梯度神经网络控制算法的可行性和有效性.在未来研究工作中,为了更好地抑制实际工况的各种噪声,将构建抗噪型神经网络模型,实现轮式移动机械臂的轨迹跟踪控制.