基于PSD和光源调制的合作目标位姿探测方法
2022-07-22程绍伟张鹏程杨海马赵红壮袁雪琦
程绍伟,刘 瑾,张鹏程,2,杨海马,赵红壮,袁雪琦
(1.上海工程技术大学电子电气工程学院,上海 201620; 2.上海仪电(集团)有限公司中央研究院,上海 200233;3.上海理工大学光电信息与计算机工程学院,上海 200093;4.盐城工学院电气工程学院,盐城 224051)
1 引 言
目前太空的部署离不开各种空间遥操作技术,主要包括航天器空间对接、轨道规避、近距离观测与检查、轨道与姿态重置等空间活动[1].一个完整的空间操作任务往往涉及到两个及以上的航天器,需要多个遥操作技术的支持才能完成.这使得航天器空间对接技术成为整个空间操作技术的基石,在实现稳定、安全和高效的对接要求下,如何探测航天器的空间位姿成为该技术的研究重点.考虑到空间对接的一般情况,对接过程中需要明确航天器的相对位姿和速度等信息[2].空间系统常用的位姿探测技术主要分为遥测法和光学测量法两大类[3],其中,光学测量法又称视觉测量法,主要包括单目视觉技术[4]、双目立体视觉技术[5]等.当前,视觉测量技术作为一种非接触式测量方法,在航空交汇对接、位姿探测等方面广泛应用[6].
由于单目视觉只能直接获得目标的平面信息,无法直接获取到纵向的深度信息,在三维空间测量领域的应用受到限制.而双目立体视觉利用仿生学的原理,可以通过三角测量原理直接获得目标的空间相对位置信息,再通过特征约束解算目标的姿态信息[7],由此成为了空间目标位姿探测的重点研究方案.并且视觉位姿探测的关键在于目标的特征提取,若目标航天器上有尺寸、结构等固定特征的可被识别称为合作目标,合作目标的特征信息可以是预先设计好的光源标靶,其光源排列形式、顺序和距离固定.而非合作目标的特征信息为通过图像处理的手段获取目标航天器的几何特征.因此,基于合作目标设计的立体视觉系统具有更好的稳定性与探测精度.传统的双目视觉相机一般采用的是CCD电耦合元件(Charge-coupled Device, CCD)和CMOS互补金属氧化物半导体(Complementary Metal Oxide Semiconductor, CMOS)作为成像传感器[8,9],随着研究的不断深入,其局限性也逐渐显现出来.首先,当测量环境复杂时,特征点的识别和匹配会面临很大挑战,容易导致测量精度不高;其次,在特征提取过程中以像素为单位进行特征图像处理,位姿解算过程中计算量庞大,很难满足实时性要求[10].光电位置敏感探测器是一种基于横向光电效应、对投射至光敏面的光斑重心位置产生快速响应,具有较高的灵敏度和响应速度,极大地简化了解算步骤,优化解算时间[11-13].采用光电位置敏感探测器替代传统双目视觉中采用的CCD和CMOS相机,通过两个不同视角的PSD位置敏感探测器(Position Sensitive Detector, PSD)相机来对特征点光源快速响应,为实时测量提供了可能.秦兴等[14]提出了基于LED发光二极管(Light Emitting Diode, LED)光的室内定位系统,系统主要利用LED矩阵通过光学系统聚焦到PSD光敏面,通过PSD处理电路输出光斑的触发信号,对光斑编号信息解码,通过连续获得的LED光斑坐标信息推算出PSD靶面的二维坐标和方向性.该方法可动态伸缩可定位区域,且避免了信号间的互相干扰,能够实现一定空间范围内的准确定位.但是无法应用于空间目标姿态角的测量.天津大学的黄战华教授团队[15-17]提出了基于单PSD相机的空间目标位姿测量方法,采用8个LED构成的合作目标,通过依次闪烁的方法进行调制,最后解算出目标的位姿信息.该方法解决了三角法探测范围小的问题,位置精度优于36.2 mm、角度精度优于2°.但位姿解算方法过于简单,合作目标更多意义上发挥的是标定作用,导致最后姿态的测量精度不理想.杨鲁新等[18]提出了利用调制光源去除PSD背景光的方法,通过光源调制和信号处理的方式,将光源调制为脉冲光,实现对背景光进行动态检测和消除,该方法硬件结构简单,且测量精度较高,能够适用于背景光变化的场景,扩大了PSD的应用范围.综上所述,本文提出了基于PSD和光源调制的合作目标位姿探测方法,利用双目视觉能够获得三维空间位置信息、以及PSD具有响应速度快的优势,设计双PSD光点相机配合LED光源调制的合作光源标靶的姿态角解算,实现了空间目标相对位置的测量与姿态的估计,提高了探测速度,能够较好地满足实时性要求,对空间目标的位姿测量具有现实的研究意义.
2 PSD基本工作原理
2.1 PSD结构模型
PSD是一种基于半导体横向光电效应的光斑位置探测器,其结构是由P型半导体、N型半导体和高阻层I层形成的P-I-N结[19].相比于CCD,其响应速度快且PSD光敏面无分割,能够进行连续测量.如图1所示,采用的二维枕形PSD基本结构,二维PSD有4个电流输出脚X1、X2、Y1、Y2.当有光束照射到光敏面时,PSD产生光生电荷,形成电流流向PSD引脚[20].

图1 枕形PSD的结构模型
光斑中心在PSD光敏面上的位置坐标x和y为
(1)
式中,x、y是入射光束的在光敏面上的位置坐标;UX1、UX2、UY1、UY2分别为PSD电极X1、X2、Y1、Y2输出的电流经过I/V转换和A/D的转换后的数字电压信号;LX、LY分别是二维PSD光敏面的边长,通常LX=LY[21].
2.2 双PSD视觉探测模型
双目视觉是通过摄像机采集两幅图像,通过计算视差得到空间三维信息[22].在此基础上构建双PSD视觉探测模型,如图2所示.其中PSD光敏面位于透镜的焦平面上,透镜焦距为f.以左右PSD相机的基线中点为球心建立空间坐标系O-XYZ,空间光点P通过左右透镜坐标系OL-XLYLZL和OR-XRYRZR在光敏面上的投影点分别为PL(u,v)和PR(u′,v′).以左PSD为例,光点P在水平方向的偏转角α1和竖直方向的偏转角β1分别为
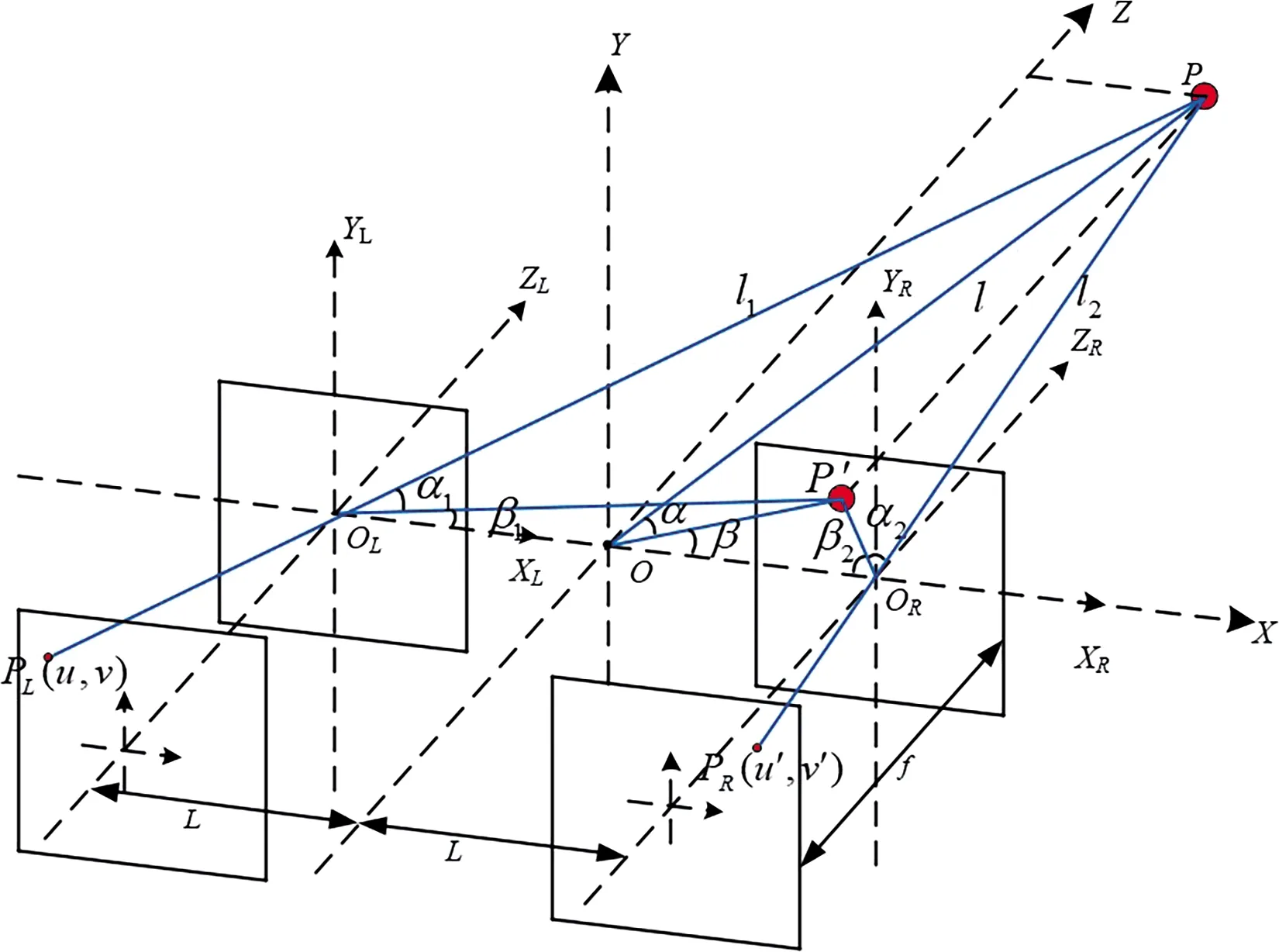
图2 双PSD视觉探测模型
(2)
(3)
根据空间光点P在球坐标系下X、Y、Z轴方向的位置关系可解算出空间光点P在O-XYZ坐标系下的坐标(l,α,β)为
(4)
3 空间合作目标的姿态角模型
在双PSD视觉探测模型的基础上,定义合作目标的空间三维姿态角模型.如图3所示,建立与位置坐标系O-XYZ三轴平行、原点为正方形特征几何中心(xP0,yP0,zP0)的姿态坐标系OP-XPYPZP,即两坐标系之间只存在平移关系、无旋转关系,其坐标转换可由下式得到
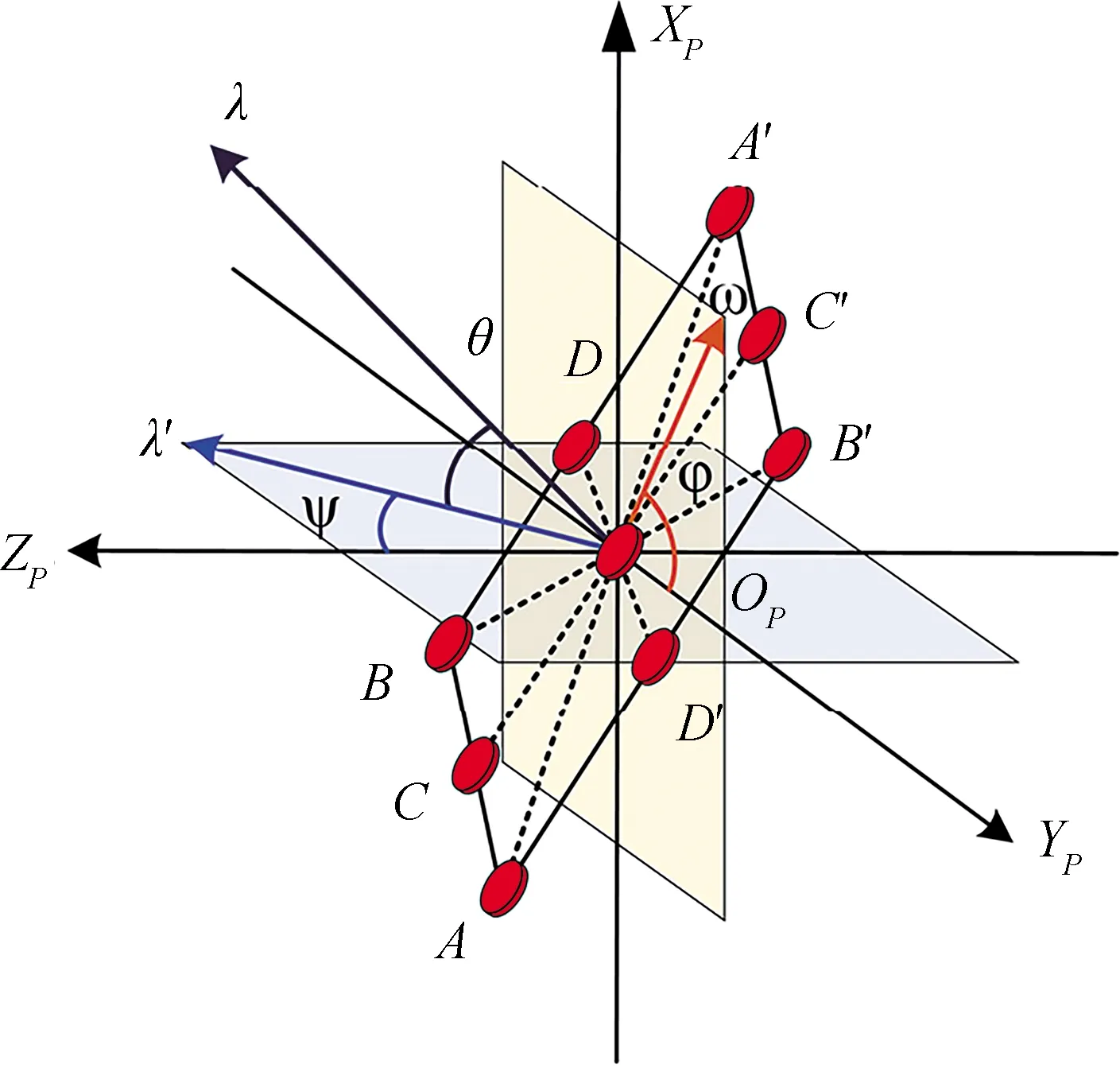
图3 空间合作目标的姿态角模型
(5)
在姿态坐标系OP-XPYPZP下,对模型姿态角-俯仰角θ、偏航角ψ和翻滚角φ的解算方法进行定义.将图3中除中心光点外的特征分为AA′和BB′、CC′和DD′两组正交特征信标,一组作为主解,另一组作为辅助解,通过平均法得到最终解.以AA′和BB′确定的单位向量lA和lB为例,即:
(6)
(7)
根据向量叉乘的定理,可以确定合作目标空间平面的方向向量为:
λ=lA×lB
(8)
合作目标方向向量λ在OP-YPZP平面上的投影为λ′,XP轴的方向单位向量为
i=(1,0,0)
(9)
俯仰角θ为方向向量λ与OP-YPZP平面的夹角,即
(10)
ZP轴的方向单位向量为
k=(0,0,1)
(11)
偏航角ψ为方向向量λ的投影向量λ′与ZP轴的夹角,即:
(12)
特征信标向量lB在OP-XPYP平面上的投影为ω,YP的方向单位向量为
j=(0,1,0)
(13)
翻滚角φ为信标向量lB的投影向量ω与YP轴的夹角,即
(14)
4 合作光源标靶的亮度与顺序联合调制方法
为了配合PSD进行位姿的解算,在有背景光的探测环境下,我们为提升系统的信噪比,减小定位误差,基于PSD的快响应速度特性,对光源进行调制.本文采用基于PWM的亮度与顺序联合调制方法.传统的合作标靶只考虑特征光点之间的几何约束关系,用于尺寸的比例计算.针对PSD的连续探测特性,在设计的二维光点阵列约束上,改进增加了独立亮度和闪烁顺序控制,实现了的更多特征信息的携带.我们选取大功率LED作为特征光源,采用PWM的恒流驱动方式,从而实现对光源的亮度调制,并通过嵌入式MCU控制系统进行光源的顺序调制.并且我们对发散角进行优化,增加探测光源和环境背景光的对比度,采用调制光源能够有效降低背景光的影响,提高系统的定位精度,提升位姿解算系统的信噪比.以四通道为例分析,具体的联合调制时序如图4所示.

图4 亮度(PWM)与顺序的联合调制时序图
图4中,t为PWM信号的一个基本脉冲宽度,T为一路LED的有效调光时间,时间内的发光强度由每一路的占空比D决定.完整调制过程为:四路LED依次发光T时间,再衔接一个时间T的无动作周期,作为调制的结束标志,即总的时间长度为5×T.
图5为示波器检测结果,其中(a)和(b)中的水平时间标尺分别为100μs和20 ms,由图(a)可知单个定时器同时输出四路PWM脉冲并无明显时延的存在,根据MCU 72MHz主频时钟和Cortex-M3内核的平均执行速度1.25 MIPS/MHz可计算出一条指令执行时间约为11 ns,也验证了调光系统多路PWM模式并发的性能.其次,图(b)中MCU对四路脉宽、顺序的实际控制情况与规定的时序逻辑一致,完整调制周期为50 ms,满足系统的设计要求.

(a)PWM波形
5 位姿测量实验系统
根据文中提出的空间合作目标位姿探测方法,搭建了如图6所示的空间位姿探测实验平台.系统由双PSD视觉相机、合作光标靶姿态控制系统和精密数控平台组成.PSD选用日本滨松光子的S5991-01二维枕形PSD,其有效光敏面尺寸9 mm×9 mm,响应时间2 μs,光谱响应范围为320-1100 nm.光标靶上的光源采用美国科锐公司CREE XP-E2系列红色LED作为光源,其中心辐射波长635 nm,有效发射半宽角度±65°.并采用均匀出光全角60°的PMMA光学透镜对发散角进行优化,提升光源与背景光的对比度,提升位置解算系统的信噪比.标靶面板的尺寸为340 mm×340 mm,3×3特征光点间距15 mm.数控平台可移动范围200 mm,精度为0.001 mm.

图6 合作光标靶的空间位姿探测系统
为了验证对调制光源的响应,搭建了调制光源的响应测量实验平台.利用设计的合作目标调光控制系统,配置一路10 KHz的PWM信号对LED进行调制,并通过支架将光源固定于PSD_1的正上方15 cm处,如图7所示.

图7 调制光源的响应测量实验平台
其次,示波器的前三个通道探头依次连接经模拟运算后PSD_1位置信号的分母项UX1+UX2+UY1+UY2(总光信号)、X分子项UX2+UY1-UX1-UY2和Y分子项UX2+UY2-UX1-UY1.根据PSD_1对调制光源的响应趋势特点,得到占空比分别为20%、40%、60%和80%的示波器波形结果,如图8所示.

(a)占空比D=20%调制光源响应
其中,水平时间标尺为200 μs,通道一总光电压的垂直电压标尺为2 V,通道二和通道三的垂直电压标尺为200 mV,并且PSD_1电极信号经I/V反向放大、模拟运算处理后,示波器实测的信号极性与产生的光电流信号极性相反.在10 KHz调制LED光源的辐射下,PSD_1的响应整体呈周期性变化,且能够明显的分辨出不同的占空比信号.
6 实验与分析
6.1 调制光源的响应分析
通过分析PSD的解调性能,绘制出探测器响应波形的占空比和能量峰值、上升时间和下降时间特征参数与调制LED光源占空比的关系.图9中,Stand-D为理想情况下占空比的解调结果,当D<20%时,调制的有效电平时间Effective Time<20 μs,结合图10知此时上升时间Rise Time>14.81 μs,PSD_1的响应结果较差,即Rise Time/Effective Time>0.75时,探测器的解调能力较差.当D>80%时,下降时间Fall Time>18.08 μs,由于高占空比与下降时间的叠加作用,波形的等效能量最低点提升,即解调过程中无效电平的基准电压的增加,探测器的解调结果仍较为准确,当有效电平的差值处于A/D转换后的可分辨范围内时,探测系统均可实现解调.
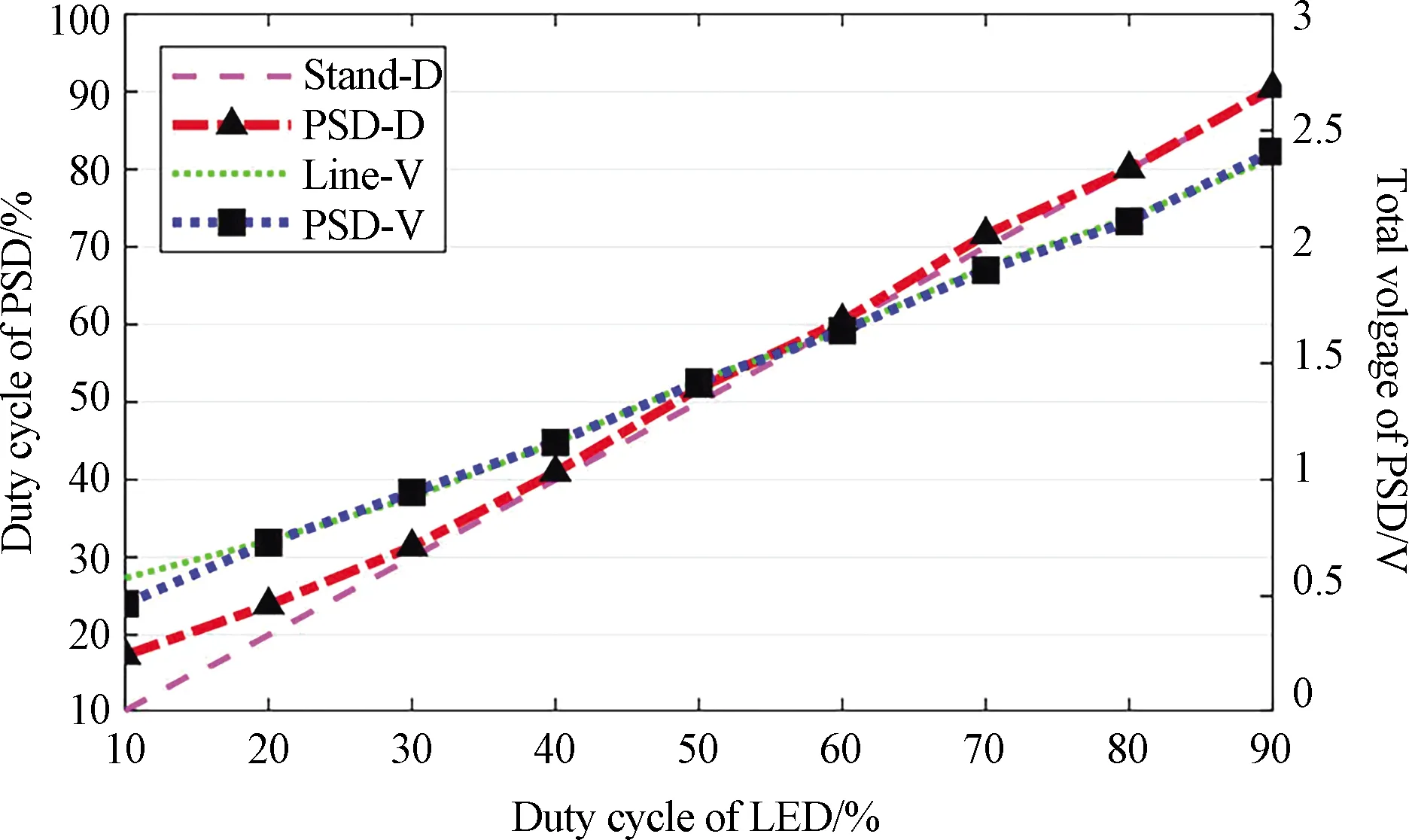
图9 PSD_1解调特性与调制占空比的关系
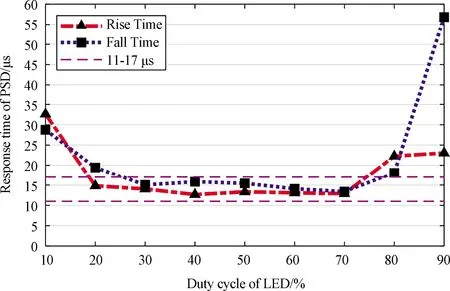
图10 PSD_1信号的响应时间与调制占空比的关系
由于位姿探测系统的光源采用亮度与顺序联合调制方案,解调过程关注的是单亮度调制的平均值,即顺序调制中不同占空比对应PSD响应信号的平均电压值,根据位置信号的平均值可计算出定位坐标的变化情况,如图11所示.随着占空比的增加,X和Y方向的坐标分子项电压均呈现线性增加的趋势.当占空比减小时,受探测器接收光强变弱的影响,定位误差在±100 μm左右.

图11 PSD_1的定位坐标与调制占空比的关系
6.2 合作光标靶的位姿探测
为了提供姿态探测的参考标准,搭建了图12中的合作目标姿态控制系统,λ为光标靶的方向向量,定义的姿态角为:俯仰角θ、偏航角ψ和翻滚角φ.配有三轴角度传感器的光标靶固定于两轴大扭矩数字舵机上,B舵机控制θ∈[-30°,30°]范围运动,A舵机控制ψ∈[-30°,30°]范围运动.
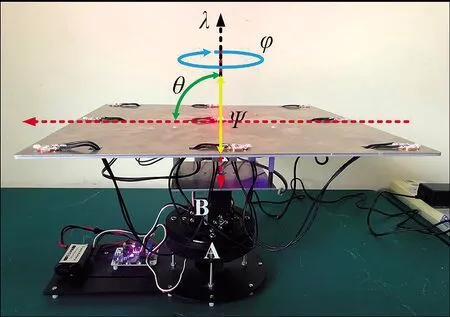
图12 合作光标靶的姿态控制系统
解算出光标靶俯仰角和偏航角的变化如图13所示,其中,(a1)、(a2)分别为为俯仰角θ在[0°, 30°]和[-30°,0°]的角度变化,(b1)、(b2)分别为为偏航角θ在[0°, 30°]和[-30°,0°]的角度变化趋势.从角度参考值Stand线性度可知,姿态控制系统的精度达到参考要求,且解算出姿态角的偏差均随角度的增大而增加,超过15°后呈现出明显的指数增加趋势,最大偏差在10°左右.
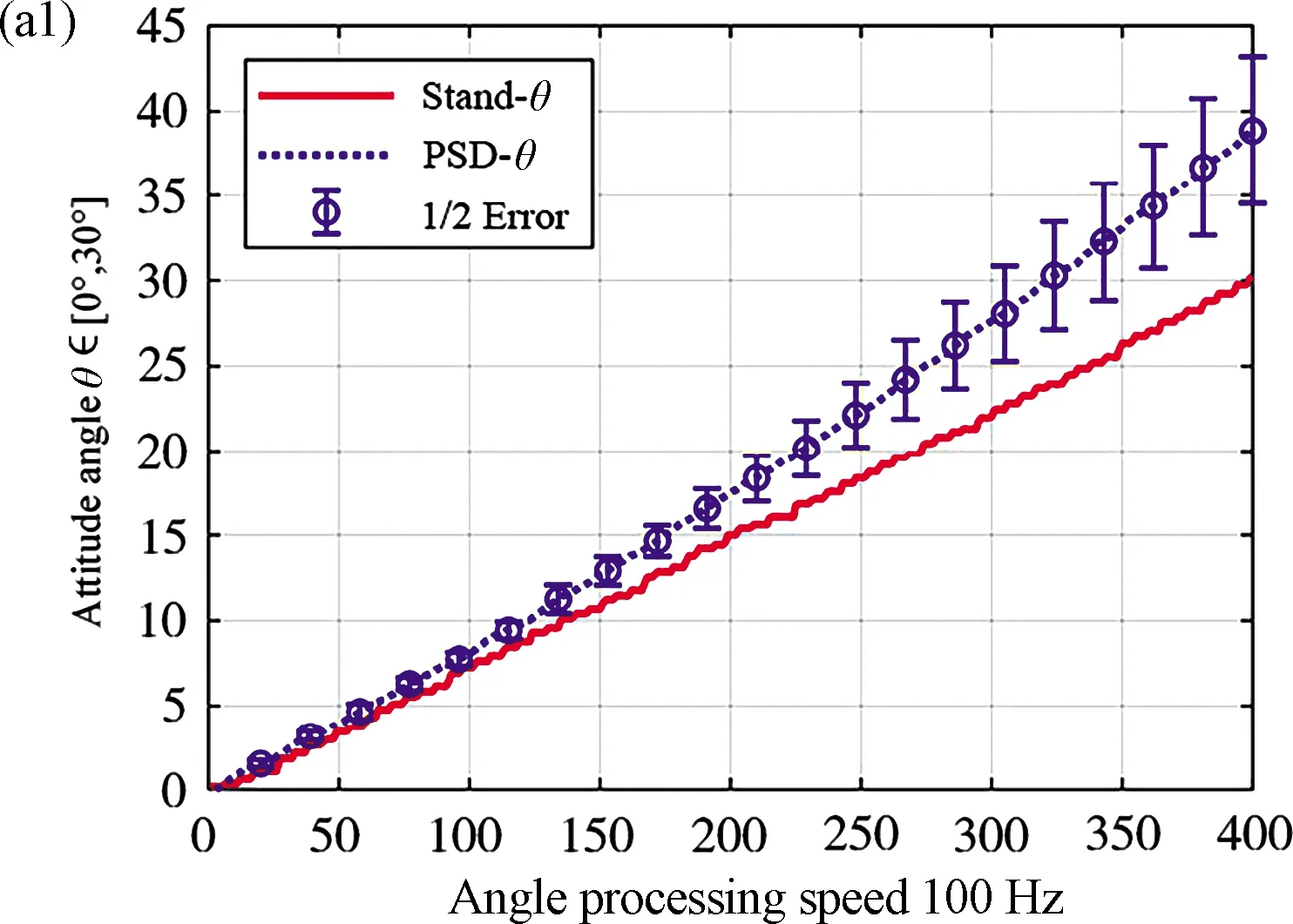
(a)俯仰角变化
俯仰角和偏航角的4个方向角度解算的偏差值如图14所示,当方向角小于15°时,所有特征光点均在系统探测视场之内,且光强基本一致,θ和ψ的平均偏差分别为0.923°和0.563°;方向角大于15°时,受限于光源发散角度的影响,PSD相机探测到的不同特征光点的光强产生较大差异,即光斑的重心位置产生微小漂移,导致θ和ψ的平均偏差分别增加至4.566°和4.106°.综上所述,搭建的双PSD合作光标靶位姿探测系统测量,在深度1000 mm处的空间160 mm×160 mm×200 mm内单光点定位误差为7.296 mm,垂直PSD相机光轴方向姿态调整±30°的测量误差为2.541°,能够稳定解算光标靶的空间位姿.

图14 方向角度解算偏差值
基于双PSD视觉的空间合作目标光标靶位姿探测系统借助光学手段和调制方式,相比于单目视觉探测系统能够快速获得空间位置深度信息的优势,且相较于CCD和CMOS传感器需要对图像进行特征提取过程,双PSD视觉还具有响应速度快,算法复杂度低的优势.在光源点亮的时序控制和亮度控制的基础上,利用光学透镜对发散角进行优化,使光源的能量重心空间分布更加集中,从而降低背景光的影响,有效提高了光源与背景光的对比度.在调制光源下,对空间目标姿态角进行分析,能够稳定解算光标靶的空间位姿,对空间目标的位姿测量具有现实的研究意义.
