基于时域自相关的直升机旋翼回波检测技术
2022-07-22汤继伟翁孚达于英杰
汤继伟,李 晨,翁孚达,于英杰,王 萍
(1.上海机电工程研究所,上海 201109;2.上海无线电设备研究所,上海 201109;3.上海航天电子技术研究所,上海 201109)
0 引言
武装直升机在现代战争中扮演着越来越重要的角色,尤其在反坦克、反潜作战和战场侦察等任务中,有独特的优势。但武装直升机飞行高度低、速度慢,甚至可以悬停飞行,这些特点对雷达预警探测构成了严峻挑战,因此迫切需要研究雷达探测悬停武装直升机目标的有效措施和方法。
传统脉冲多普勒体制雷达的直升机回波主要由机身回波、旋翼回波、地海杂波和接收机热噪声四部分构成。对于运动直升机,其机身回波包含多普勒信息,雷达利用机身回波的多普勒信息提取制导信息。对于慢速或悬停直升机,由于机身回波与地海杂波类似,其回波无多普勒信息,所以慢速或悬停直升机不适宜采用机身回波提取制导信息。
主动雷达导引头对慢速或悬停直升机进行探测的主要难点在于直升机飞行高度低,其机身回波的多普勒频率接近于零,受地海杂波影响较大。对于直升机目标而言,即使处于悬停状态,其旋翼转动形成的多普勒调制信息仍为可靠检测提供了可能。悬停直升机旋翼回波信号具有持续时间短、突变快的特点,在时域上表现为周期的闪烁脉冲,闪烁信号过后信号能量迅速衰落,时域表现上与噪声类似,能为主动雷达导引头提供制导信息。
1 悬停直升机旋翼回波模型
远场条件下,旋翼桨叶可以等效为一定长度的理想线源,以一定速度绕叶毂中心点旋转。本文只对直升机主旋翼回波感兴趣,不考虑叶毂和尾翼回波。
假设直升机以速度水平匀速飞行,导弹相对于旋翼桨叶中心的速度为,旋翼桨叶在目标本地坐标系中绕轴匀速旋转。以雷达导引头为坐标原点建立坐标系,设为旋翼桨叶中心的方位角,为弹目视线(雷达导引头与直升机旋转中心连线)与旋翼旋转平面的夹角,为旋翼桨叶中心相对于雷达导引头的高度,为雷达导引头天线相位中心至直升机旋转中心的距离,为坐标系的原点在坐标系上的投影,雷达导引头与旋翼桨叶的位置关系如图1所示。
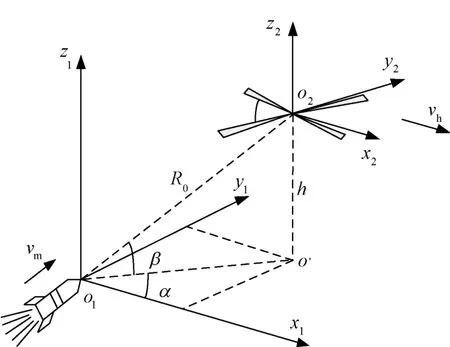
图1 雷达探测直升机旋翼回波的几何模型
直升机旋翼回波模型可以表示为

式中:为桨叶数目;为旋翼回波幅度;为桨叶长度;为转轴半径;为雷达信号波长;为旋翼转速;为桨叶旋转初始角。
2 直升机旋翼回波特点分析
对式(1)进行傅里叶变换,可得调制回波的频域表示

式中:为线谱个数;C 为线谱幅度;(·)为冲激函数;为线谱周期。旋翼回波的调制谱由一系列线谱组成,线谱周期=,其中桨叶个数为偶数时1,为奇数时2。线谱幅度C 由参数,,,,,和贝塞尔(Bessel)函数决定。
理论上只要波束照射时间足够长,雷达接收机将收到一串幅度由sinc函数调制的脉冲串,当波束垂直照射桨叶时,回波达到最强,从而形成所谓的回波闪烁。闪烁持续时间Δ近似有

在雷达检测目标时,目标回波信噪比通常比较低,起主导作用的回波脉冲主要集中在3 dB脉冲宽度内,所以脉冲重复频率应满足

3 直升机旋翼回波信号仿真
对不同旋翼特征的两类典型直升机目标回波信号进行仿真。
(1)典型目标1
典型目标1的桨叶的数目是4,转速5.80 r/s,旋翼直径11.5 m,对于每个桨叶,1 s 之内有23.2次闪烁,即闪烁间隔=0.043 1 s。典型目标1的旋翼回波时频域信号如图2所示。

图2 典型目标1旋翼回波时频域信号
(2)典型目标2
典型目标2的桨叶数目是6,转速3.45 r/s,旋翼直径18.9 m,对于每个桨叶,1 s 之内有20.7次闪烁,即闪烁间隔T=0.048 3 s。典型目标2的旋翼回波时频域信号如图3所示。
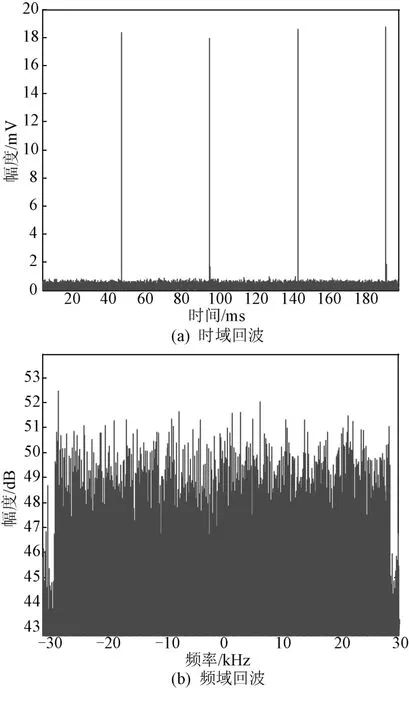
图3 典型目标2旋翼回波时频域信号
4 悬停直升机检测方法
经过前面仿真分析可知,普通雷达目标回波能量在时域上是持续的,在多普勒频域上是积累集中的。与此相反,直升机旋翼回波在时域上表现为sinc函数的周期性、小时宽闪烁脉冲。周期闪烁脉冲的能量在脉峰过后迅速衰减,在下一个闪烁脉冲出现之前几乎没有旋翼回波能量,而在多普勒频域能量是分散的,存在频谱展宽,作相参积累可能性不大。就旋翼回波检测而言,慢速或悬停直升机机身的雷达回波可被视为目标杂波。进行旋翼回波时域检测时,信号具有最大瞬时功率,具有一定的优势,若能有效滤除地杂波和目标杂波,就可以提高信杂比,进而提高检测概率。
4.1 悬停直升机检测原理
旋翼回波信号具有明显的周期性,可以利用其周期性在时域上进行检测。旋翼回波时域信号是周期的,其自相关序列也具有周期性,而旋翼回波信号与噪声不具有相关性,故采用时域自相关的方法对悬停直升机进行检测。
周期性信号序列的自相关函数

式中:为数据长度;()为自相关序列;*为取共轭运算;为延迟点数。
信号的自相关反映了信号和其自身作了一段延迟后信号的相似程度。一个周期信号的自相关函数也是周期性的,并且和原信号的周期相同,即()(),其中为信号周期。由于调制回波基带信号具有闪烁周期,故其自相关函数具有周期性。
为了减少计算量,在频域计算自相关序列。先对原序列做快速傅里叶变换(FFT),同时将原序列逆序后做FFT,两个序列FFT 结果点乘,然后将结果做快速傅里叶逆变换(IFFT),即可得到自相关序列。悬停直升机旋翼回波时域及自相关信号如图4所示。可以看出,自相关信号具有明显的周期性,且周期等于基带信号闪烁周期。

图4 悬停直升机旋翼回波时域及自相关信号
4.2 悬停直升机检测原理
悬停直升机检测原理框图如图5所示。旋翼回波信号经过天线后进入回波接收通道。回波接收通道由微波-前中组件和中频接收机共同构成。微波-前中组件将接收到的高频回波信号经过频率搬移,转换为和、方位、俯仰三路中频信号;中频接收机将接收的中频信号放大、滤波,使中频信号获得适当的增益并抑制带外干扰。中频接收机本身具有一定的增益,在中频接收机的输出端采用数控衰减器,通过自动增益控制,使中频输出信号幅度始终保持在模拟数字转换器(A/D)的动态范围内。

图5 悬停直升机检测原理框图
将和通道基带回波信号采样数据排列成恒虚警检测器所需的形式,并取其模值进行恒虚警检测,当被检测量超过基带回波恒虚警门限,认为闪烁信号存在,记为“1”,同时记录闪烁信号的幅度和位置;然后将闪烁信号提取出来做自相关处理,对自相关结果进行相关峰恒虚警检测及综合判别。
4.3 悬停直升机检测算法
(1)接收中频数字化旋翼回波信号
回波接收机由微波-前中组件、中频接收机共同构成。微波-前中组件将接收到的高频回波信号经过频率搬移转换为中频信号;中频接收机将中频信号放大、滤波,使中频信号获得适当的增益并抑制带外干扰;模数转换器采集中频接收机的输出,并通过数字自动增益控制环路实现信号的大动态接收和处理。
(2)搜索检测旋翼闪烁信号
对旋翼的数字化回波信号进行正交处理,得到旋翼回波基带信号。对旋翼回波基带信号进行恒虚警检测,根据检测结果进行聚类处理剔除野值,计算闪烁脉冲出现的位置和幅度,提取闪烁信号。对提取的闪烁信号进行自相关处理,得到相关峰。对相关峰进行恒虚警检测,若相关峰峰值超过设定阈值,判断检测到旋翼闪烁信号,执行后续步骤;若相关峰未过设定阈值,则判断未检测到旋翼闪烁信号,继续信号接收、搜索检测。
(3)旋翼回波信号跟踪
直升机旋翼回波信号中闪烁脉冲(即闪烁信号)具有明显的周期性,闪烁信号过后,信号能量迅速衰减,两次闪烁信号之间的回波信号也是多普勒调制信号,含有制导信息,本文称两次闪烁信号之间的回波信号为旋翼噪声信号。为提高雷达误差更新速率,应充分利用该旋翼噪声信号进行直升机跟踪。
检测到旋翼闪烁信号后对其进行跟踪,在跟踪的过程中,当和通道能量低于门限时,旋翼噪声报警指示输出低电平,只提取闪烁脉冲的雷达误差,雷达误差更新时间为旋翼回波闪烁周期;当和通道能量高于门限时,旋翼噪声报警指示输出高电平。
当旋翼噪声报警指示高电平持续时间大于门限时,在时域提取旋翼闪烁信号和旋翼噪声信号的雷达误差,进行角度跟踪,其更新时间为雷达帧处理周期,明显高于闪烁周期,有利于提高制导精度。
5 实测数据处理结果
为了验证本文基于旋翼回波时域自相关的悬停直升机旋翼回波信号检测方法,以脉冲多普勒雷达探测悬停直升机为背景进行外场跟飞实验,并对实测数据进行分析。
跟飞直升机旋翼桨叶的数目是2,桨叶外层蒙皮是玻璃纤维,内层蒙皮是碳纤维,前缘是塑料层,外边用薄不锈钢片保护。其旋翼直径为6.3 m,旋翼正常转速为8.6 r/s。对于每个桨叶,1 s 之内有17.2 次闪烁,对应的闪烁周期为58.1 ms。实测悬停直升机旋翼回波时域及自相关信号如图6所示。

图6 实测悬停直升机旋翼回波时域及自相关信号
定义旋翼截获指示信号和旋翼噪声报警指示信号:当连续两帧截获闪烁脉冲,旋翼截获指示有效;在旋翼截获指示有效时,若通道能量高于某一门限,旋翼噪声报警指示有效。实测的旋翼截获指示及旋翼噪声报警指示、旋翼截获距离如图7和图8所示。实测悬停直升机旋翼回波信噪比及闪烁周期如图9和图10所示。
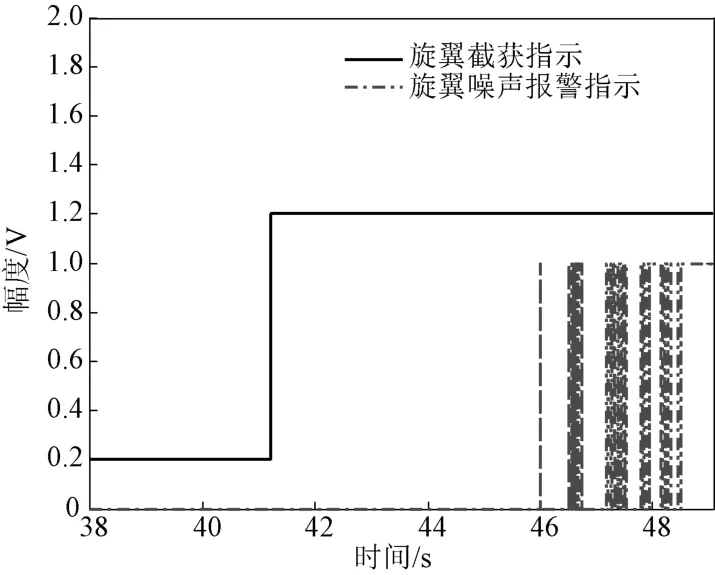
图7 旋翼截获指示及旋翼噪声报警指示
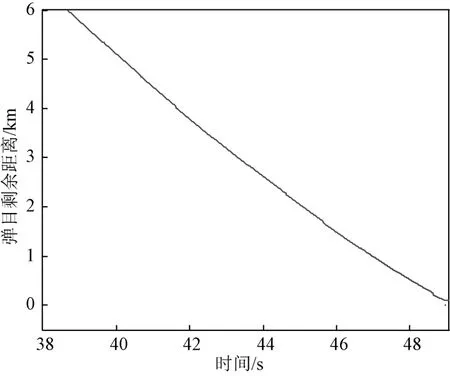
图8 旋翼截获距离

图9 旋翼回波闪烁及回波相关的信噪比
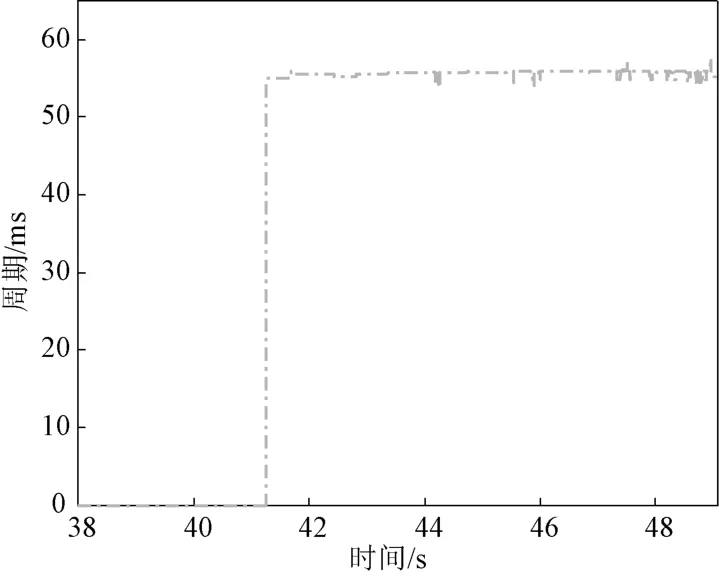
图10 旋翼闪烁周期
通过实验数据分析可知,旋翼回波的自相关序列具有明显的周期性,其周期与旋翼回波闪烁周期一致。识别出来的旋翼周期为56.0 ms,与理论值58.1 ms较为接近,证明雷达正确跟踪了旋翼回波信号。雷达在4.3 km 处稳定跟踪悬停直升机目标,1.2 km 处,回波能量增强,旋翼噪声报警指示有效。本文提出的基于旋翼回波信号时域自相关的悬停直升机检测技术通过实验验证,具备识别跟踪悬停或者慢速直升机的能力。
6 结论
在防空武器打击低慢小目标的应用背景下,为满足脉冲多普勒雷达导引头对慢速或者悬停直升机进行识别跟踪的任务需求,本文提出了运用时域自相关对旋翼回波信号进行检测跟踪的技术。本技术充分利用旋翼闪烁信号的特点,对旋翼回波信号进行自相关检测,降低虚警概率,提高了检测的可靠性。通过实验验证,本技术能够有效检测多种直升机旋翼回波信号,具有较强的适应性。本技术设计简单,计算量小,通用性好,易于工程实现,是一种适合于脉冲多普勒雷达系统使用的慢速或悬停直升机检测技术。
