软体机器人研究现状与趋势
2022-07-21郭倩楠
郭倩楠
(工商银行北京分行,北京,100031)
0 引言
21世纪以来,机器人学科及其延伸出的各种产业得到了世界各国政府的大力重视与支持。中国针对国内工业机器人产业发展,相继出台了各种政策,国家自然科学基金、科技重大专项等项目规划中也有许多机器人相关领域的项目[1]。美国相继启动了“国家机器人计划”及“国家机器人计划2.0”,这些计划受到了美国国家科学基金会(NSF)、美国农业部(USDA)、美国能源部(DOE)和美国国防部(DOD)等多个政府机构的支持。同样地,欧盟以及其他一些国家也都在紧锣密鼓地布局机器人行业的发展。机器人技术日益成为各国科技、军事和综合国力竞争的重要一环。
机器人技术的应用场景众多,因此对于机器人的分类方式也有许多。从机器人的制造材料选择的角度来看,人们平日里见到的机器人多数为刚性机器人,是由刚性构件通过运动副连接的结构,而本文要重点介绍的软体机器人则多数选用柔性材料,如硅胶、塑料、织物等。刚性材料具有运动精准、承载载荷大等优点,但应用其制造的机器人的环境适应性较差,结构也较为复杂,体型较大。相反地,软体机器人则拥有极强的环境适应能力,如能通过各种狭长的缝隙等,结构也相对简单[2]。因此在一些特殊领域,如管道探测、果实摘取等,软体机器人相较于刚性机器人有很大优势,也能很好地满足作业的要求。
机器人是一门新兴学科,从机器人之父约瑟夫·恩格尔伯格在1959年创造出第一个自动搬运手臂到现在不到一个世纪,而软体机器人的研究更是开展得较晚,因此有关于软体机器人的研究还有许多需要改进和完善的地方,如软体机器人的无限多自由度增加了其运动建模的难度等。本文从结构、驱动方式、建模和制造方法四个方面介绍软体机器人的研究概况。
1 结构
机器人的结构设计来源于仿生学,比如刚性机械臂的结构设计参照的是人体的手臂结构。同样地,软体机器人的结构设计也是参照了自然界中生物的生理结构。
软体机器人的结构可以分为静水骨骼结构、肌肉性静水骨骼结构和其他结构[3]。
1.1 静水骨骼结构
静水骨骼结构源于许多软体动物(如蠕虫等),大部分软体动物没有骨骼,他们是由表皮、体液、神经系统及肌肉等组成。由表皮包裹体液和神经系统,形成体积不变的一个封闭腔(体积由体液决定),这是静水骨骼结构的典型结构。当体积被限制时,肌肉往一个方向伸长或收缩时,其他方向相应的也会收缩或伸长,于是通过不断地控制不同肌肉的收缩以及收缩量就可以实现运动。
利用上述原理,麻省理工学院仿生机器人实验室率先研制出了仿生蚯蚓机器人Meshworm[4]。如图1所示,蚯蚓的纵向肌肉收缩可以增加身体的直径,圆周状的环肌收缩可以缩短身体的直径,当各段的肌肉配合进行收缩、扩张时,蚯蚓就可以实现前后运动。
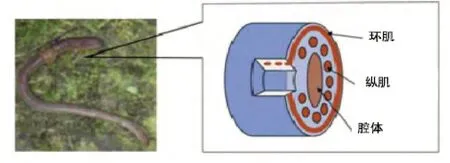
图1 蚯蚓结构
如图2所示,Meshworm采用了形状记忆合金(Shape memory alloy,SMA),主体为一根聚合管,在主体周围环绕网格状SMA,驱动周围环绕的SMA形变,其就可以模仿蚯蚓肌肉的运动。SMA的形变作用于主体聚合管上,可以实现整体机构的前后运动,移动速度可达0.05m/s。该结构可以承受较大的载荷,在一些狭窄崎岖的地形中可大放异彩。
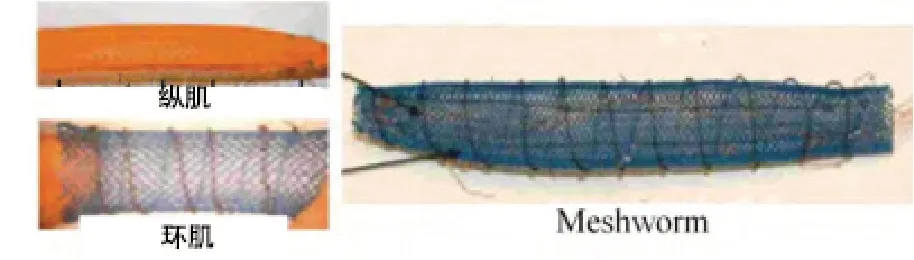
图2 Meshworm结构
之后,有研究人员参照蠕虫、爬虫等软体动物研制出形形色色的静水骨骼结构,比如,GoQBot软体机器人具有和毛虫一样的外形,并能实现滚动、弹射运动等[5],这里不一一介绍。
1.2 肌肉性静水骨骼结构
肌肉性静水骨骼结构没有封闭的流体腔,这是它与静水骨骼结构的最大不同。肌肉性静水骨骼结构完全是由肌肉纤维组成,例如动物的舌头、章鱼的触手等都是肌肉性静水骨骼结构。
其中,具有代表性的设计是欧洲章鱼项目组,该项目组参照章鱼触手的结构进行仿生结构设计。如图3所示,章鱼的触手由轴向、横向和斜向的肌肉纤维组成,肌肉之间嵌着神经系统,章鱼可以通过收缩触手的轴向肌肉来实现触手的缩短,收缩横向肌肉可以使触手伸长,收缩斜纹肌则可实现触手的旋转。
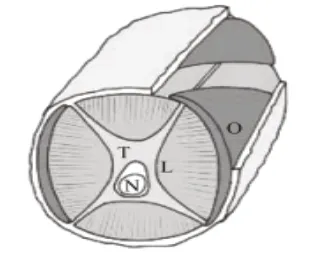
图3 章鱼触手肌肉
该项目组基于此原理,研制出基于电活性聚合物(EAP)人工肌肉的仿生章鱼触手。如图4所示,四根圆柱形的EAP人工肌肉作为轴向肌肉,而四个弧形的EAP人工肌肉则作为横向肌肉,在进行镀金电极、封装等制作步骤后,仿生章鱼肌肉便制作完成。通过实验验证,该仿生章鱼触手在施加2000V的电压之后可以达到20%左右的收缩量[6]。
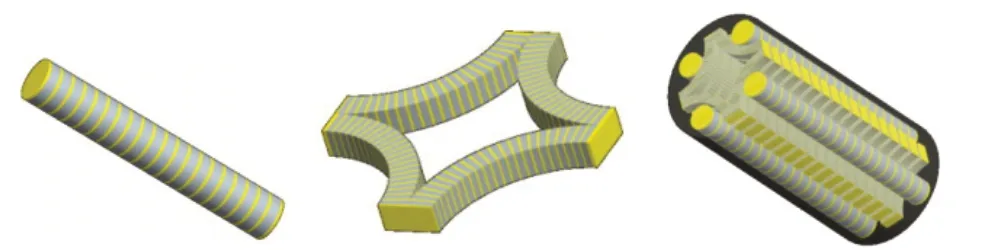
图4 EAP人工肌肉
2 驱动方式
为了实现软体机器人的运动,结构设计完成之后,便要考虑驱动器的选择。由于软体机器人的特殊结构和运动形式,其对制动器的灵活性、功率等都提出了很高的要求。
软体机器人的驱动方式大致可以分为流体驱动、智能材料驱动和化学反应驱动三类。
2.1 流体驱动
流体驱动中最具代表性的是气体驱动,气体驱动通过气压变化来使结构变形或运动。气体驱动又可以分为正压驱动与负压驱动,正压驱动是向构件中充入气体来增大构件内部的气压来使构件膨胀从而产生运动,而负压驱动则是利用仪器抽出构件内的气体,使构件的腔体收缩来实现目标动作。
如图5所示,哈佛大学设计的多步态软体机器人从进气管通入气体,改变气压大小等参数就可以实现机器人的前进等运动[7]。
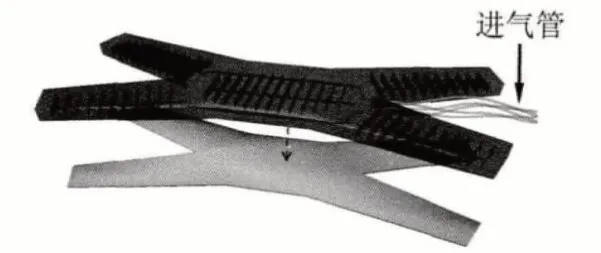
图5 多步态软体机器人
图6展示的是Brown等研制的球形软体抓手,其通过抽取腔体里的气体使机器人表面紧紧贴附在需要抓取的物体之上并实现抓取[8]。

图6 软体抓手
2.2 智能材料驱动
前述形状记忆合金(SMA)、电活性聚合物(EAP)等都是属于智能材料。
SMA是通过热弹性与相变及逆变而具有形状记忆的特性,通过加热升温,SMA就可以消除其在较低温度下产生的形变。SMA驱动器具有质量小、无噪声等优点,但也存在效率较低、容易老化的缺点。
EAP在受到电刺激之后会产生形变,EAP材料的质量比较轻,驱动效率比较高,抗冲击的能力也比较强,但是驱动EAP所需要的激励电场比较大,稳定性也比较差。
随着材料科学的不断发展,越来越多的优良性能的材料逐渐应用到软体机器人的研究中,相信在未来会出现集效率高、所需激励能量小等各种优点的新型智能材料。
2.3 化学驱动
化学驱动是指利用不同物质之间的化学反应产生的能量来驱动机器人运动,往往是通过在机器人中内置反应剂,再根据运动需求投入相应的催化剂产生能量,通过机器人内部的通道来传递能量,最终使机器人运动起来。
如图7所示,全软体机器人Octobot是由3D打印技术制作而成,其8只触手通过气液体微孔道联通;注入过氧化氢溶液到机器人体内,在压力的作用下,溶液通过微孔道流过机器人体内,当遇到体内的铂催化剂时,发生反应并释放出气体,触手通道就会膨胀,从而实现机器人的运动。

图7 全软体机器人
3 建模方法
传统刚性机器人的建模已经有了许多系统的方法,如用D-H法可以得出各关节的相对坐标量,也可以建立末端的运动学模型,可以准确地获得实时的末端运动参数。而软体机器人变形连续性以及无限自由度并不完全适用传统的分析方法和模型,因此需要在已有的方法和模型基础上,继续补充或者提出新的模型来求解软体机器人的运动学问题。
目前常用的软体机器人建模方法是,在连续刚形体方法的基础上,将每一小节的常曲率(CC)段接合在一起,最后得到分段常曲率(PCC)模型。这个PCC模型把长度、曲率和偏转角作为参数,再通过改进的D-H法将构型空间下的软体结构的末端点映射到工作空间中,从而得出从构型空间转换到工作空间的通用齐次矩阵。如果构件的曲率不为常数,则需要将构件分为若干曲率恒定的小段,再使用PCC模型进行求解。
也有许多新的建模方法被提出,如Trivedi等在梁理论与Cosserat杆理论的基础上,结合得到了一种更为复杂的梁理论[9];Renda等基于Cosserat模型的离散化开发了两种高效的递归算法,提出了一种新的用于多分段软机械手动力学的分段恒定应变模型,减少了计算时间,也提高了模型精度。
4 制造方法
软体机器人的制造包括机器人结构的制造、驱动器的制造、柔性电路的制造等。软体机器人本体结构的制造方法有3D打印、快速成型技术等。快速成型技术又包括形状沉积法(SDM)、熔融沉积成型、未注射成型等。
SDM方法可以把传感器、电路结构等嵌入在其中,图8是SDM的流程示意图。早在1994年,Merz等就详细地讲述了SDM的实施步骤。
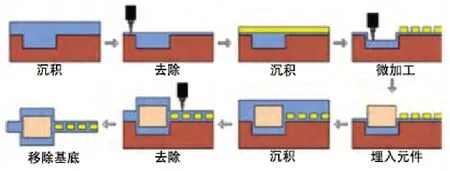
图8 SDM工艺流程图
SMA制动器的主要制作方法也可采用SDM工艺,如图9所示,将SMA通过表面微加工技术嵌入聚酰亚胺基底上。
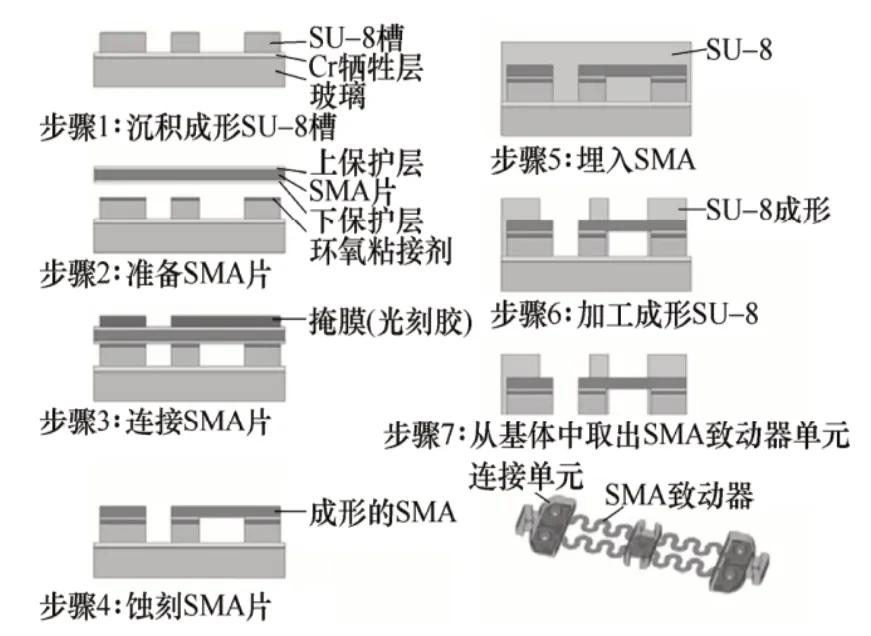
图9 SMA嵌入工艺
可伸展的电路一般有两种,一种是波纹状结构,在制造时留下拉伸的余量,当施加应变时,余量可以保证电路不断裂[10]。另一种是平行四边形的开环网状结构,将电极沉积在网状结构的表面,平行四边形不稳定,可以拉长或缩短,从而实现电路的伸展[11]。
5 总结和展望
软体机器人涉及到材料科学、化学、MEMS、控制科学等学科,是一门综合学科,同时也是一门新兴学科。软体机器人的主体与驱动器的材料主要依靠材料学的发展,现有的材料方案在应力应变、寿命等方面或多或少都有一些缺陷。由于软体机器人理论上的无限自由度和运动的不可靠性和多样性,现有的建模方法还有许多缺陷,而没有精确的建模方法就没有办法进行精准的控制。当然根据欧洲章鱼项目组对章鱼触手的研究,章鱼的触手运动并不是完全由大脑控制的,许多具体的信号是由章鱼的触手自行计算并发出的,这也为研究控制软体机器人提供了一些新的思路。
综上所述,软体机器人目前还存在许多问题有待解决,但所有学科都是一步步突破障碍逐渐走向成熟的,相信随着各个学科的发展以及深度融合,软体机器人将在不远的未来大放异彩,成为人类最好的助力之一。
