基于电子皮肤的协作机器人碰前安全方案研究
2022-07-21姜宇黄睿郎需林徐凯
姜宇 黄睿 郎需林 徐凯
(1 深圳市越疆科技有限公司上海分公司,上海,201800;2深圳市越疆科技有限公司,深圳,518000)
0 引言
协作机器人是一种被设计成在协作区域内与人直接进行交互的机器人,它打破了传统工作模式,无需安全围栏,为全手动和全自动的生产模式之间搭建了桥梁,可实现人机协作安全作业。
柔性生产技术是高端智能制造的典型要求,协作机器人具有拖动示教、碰撞检测和安全约束功能,以其快速部署、柔性制造、人机协作、柔顺力控的特点,解决行业小批量多品种、产品频繁换新、人机共存等难题,是传统制造业赋能升级的关键环节,可满足个性化、定制化、多样化柔性生产需求,在3C电子、新能源、通信设备等领域具有广泛应用,在商业、医疗和服务行业应用亦是协作机器人发展的另一个增长点。
1 协作机器人碰撞控制安全
协作机器人碰撞控制安全技术主要有两类,碰撞后控制安全技术与碰撞前控制安全技术。碰撞后控制安全技术主要是靠优化机械结构设计、碰撞力抑制算法和触觉力觉传感器等方法降低碰撞发生后造成的伤害;碰撞前控制安全技术则是通过视觉、激光、接近觉等手段来提前预测和防止碰撞的发生。
碰撞检测作为协作机器人安全功能的代表,目前主要分为两种方案,UR公司的无传感器电流检测的碰后碰撞检测技术和KUKA公司的关节力矩传感器方案。
根据ISO15066标准计算公式,机器人与人体的碰撞接触力,直接受到机器人本体质量、负载、运行速度的影响,协作机器人虽然具有一定的碰撞检测灵敏度,但仍然是接触式的安全防护,存在接触碰撞伤害。为了达到允许的生物力学限制,在协作安全模式下,机器人要大幅进行降速,但由于机器人自身安全属性,冲击、夹伤的危险性依然很大。从表1可以看出,协作机器人在低速250mm/s的碰撞力超过10kg,高速1m/s的碰撞力超过50kg。

表1 国外协作机器人碰撞检测对比
触觉传感技术[1-2]是机器人感知外部信息的重要手段,随着机器人向智能化的方向发展,机器人要求具备触觉感知能力,从而增加机器人环境适应能力及人机交互安全性。例如台湾原见精机公司开展了电感式安全皮肤的产品研究,并将其产品应用在佳世达科技股份有限公司的生产线上。
当前市场上的机器人安全皮肤功能单一,基本停留在触停阶段。触觉传感器碰撞控制技术的碰后检测特性,无法避免协作机器人高动量带来的瞬间碰撞冲击伤害,对安全性的实际提升效果有限。
事前控制的安全技术是在机器人上使用非接触式的传感器,对周围环境及人的行为进行预测,并采取相应的安全避障措施,因此可以从根本上避免碰撞的发生,极大提高人机交互的安全性。
碰撞前控制安全技术主要分为基于视觉系统[1-2]的避障技术和基于电子皮肤的避障技术。基于视觉的碰前检测方案往往对光照环境、障碍遮挡等十分敏感,并且成本偏高。而基于电子皮肤的机器人避障控制[3],对应用场景无较为苛刻的光照条件要求,具有较为广泛的应用场景,能够实现机器人部分和全部包覆,使得机器人在运行过程中能够感知到接近物体,从而保证机器人安全和更好的人机交互。
另一方面,随着协作机器人速度节拍工业性能的需求以及大负载协作机器人的发展,接触式碰后检测方案已经遇到了协作安全的瓶颈。
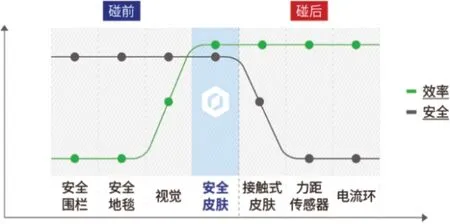
图1 协作机器人安全技术
根据相关技术问题和研究现状,本文针对协作机器人安全技术展开的研究,包括:
1)碰撞伤害风险。当机器人负载增大、自重与臂展长度增加时,运行中的高速高惯量会大大增加碰撞造成的伤害,为保证人机协作的安全性与效率,本文提出“非接触式的碰前感知技术研究”,通过基于高维度特征学习的方法,增加检测距离。
2)适用性问题。在非结构化的工作场景的中,光照、遮挡都会对现有的基于视觉、激光等碰前感知技术造成影响,本文提出“非接触式电子皮肤包裹穿戴式防护设计”,解决协作机器人在非结构化工作场景中的安全技术的适用性问题。
3)可靠性问题。为保证协作机器人安全可靠地运行,本文提出“双冗余机器人安全控制系统设计”。
2 协作机器人碰前感知安全系统
2.1 电子皮肤结构硬件设计及整机包裹穿戴
协作机器人在非结构化的工作场景中,光照、遮挡都会对现有的基于视觉、激光等碰前感知技术造成影响。本文提出复杂电磁力环境下“非接触式电子皮肤包裹穿戴式防护设计”。
研究机器人轻量化一体式电子皮肤单元模块的集成包裹穿戴[4],要通过降噪屏蔽技术,实现复杂机电磁力环境下,机器人高动态运动对电子皮肤的干扰的屏蔽。其结构设计方面要符合如下要求:
1)合理设计包裹拆分结构和紧固方式,实现紧密贴合和易拆装;
2)优化线材,减少线材晃动,通过内侧肋片实现线材压紧;
3)合理布置支撑结构外侧的涂层、保护漆,保护导电漆层不被损害;结构绝缘,并保证皮肤不受机器人外壳的信号干扰;
4)模块化,提高重复利用率,减少设计中的变量,可以根据不同的机器人外形改变皮肤外观。
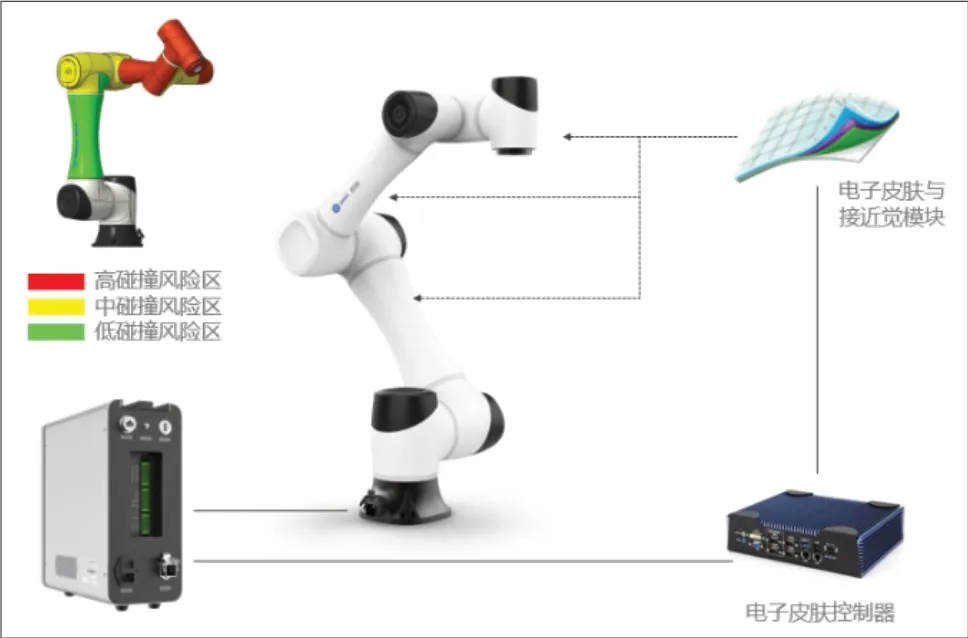
图2 电子皮肤感知检测单元
2.2 双冗余机器人安全控制系统
协作机器人的高速高惯量,使得发生碰撞所带来的伤害远远超过人体能够承受的极限,因此,控制系统需要保证协作机器人安全可靠的运行,不发生误判漏判。对此,本文提出“双冗余机器人安全控制系统设计”。
功能安全控制器是保证协作机器人安全运行的核心系统,保证多样的安全输入信号(比如急停信号)的接收处理以及输出合理的安全信号,控制执行设备(比如机器人)进入安全状态,从而保证人和设备的安全。功能安全控制系统与机器人的运动控制系统处于同等地位,它是满足机械臂能进入欧美市场的必需条件,是满足CE/CR认证的必备组成部分。
目前市场上的安全控制器主要被欧美日等大厂所掌握,所以我国安全控制器的研究和开发是一项急迫而又有挑战的项目,有助于弥补目前国内市场对功能安全控制器的技术短缺现象。
本文设计的安全控制器满足ISO13849机器人安全需求,功能安全满足IEC 61508 SIL3标准等级,支持安全IO输入及输出,端口灵活配置,内部逻辑可灵活配置和冗余架构。
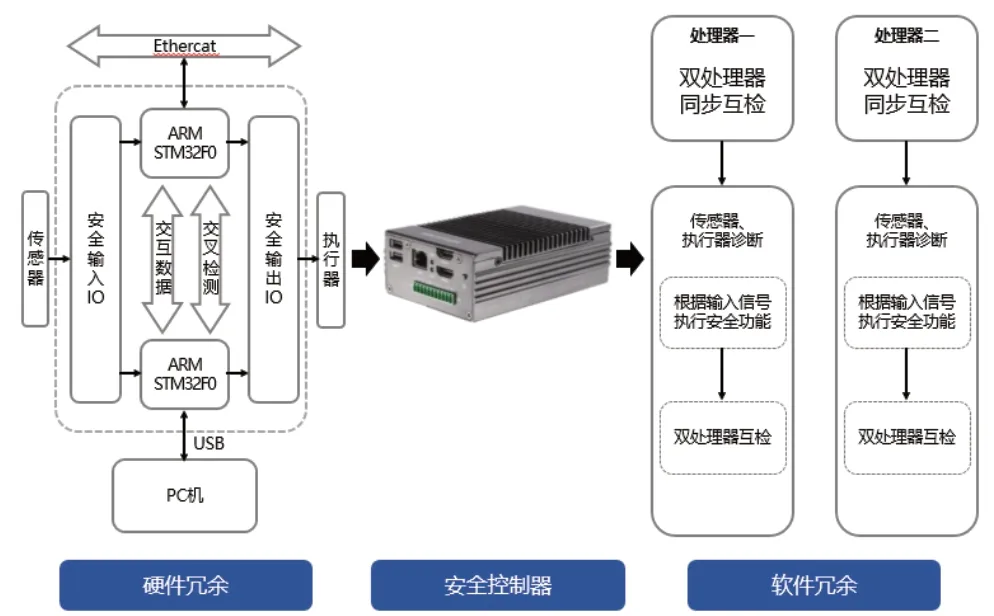
图3 多传感器信息融合的机器人安全控制软硬件平台架构
基于电子皮肤碰前预感知的机器人安全控制硬件平台的设计要点有:
1)采用同架构冗余方案,按照IEC61508 SIL3标准设计;
2)采用稳压方案,接口加强隔离,屏蔽干扰;
3)支持PC的接口配置及逻辑配置;
4)采用EtherCAT接口,使用STM32+LAN9252方案,支持EtherCAT主站通信。
基于电子皮肤碰前预感知的机器人安全控制软件平台的设计要点有:
1)双处理器同时运行,均可以完成安全功能;
2)双处理器在运行时对各自监视的传感器、自身运行状态、关键变量可进行交互比对;
3)双处理器同步运行,步调一致;
4)双处理器只要有一个发生故障,另一处理器立刻执行安全功能。
3 电子皮肤接近传感技术研究
3.1 电容接近觉传感器原理
如图4所示,当导体(比如人手)与电容接近觉传感器极片接近的时候,导体与极片间会形成接近电容。通过电容、电介质常数、两极板正对面积和距离以及静电力常数的建模模型,可以根据接近电容的大小来准确预测人手与传感器的距离[5]。
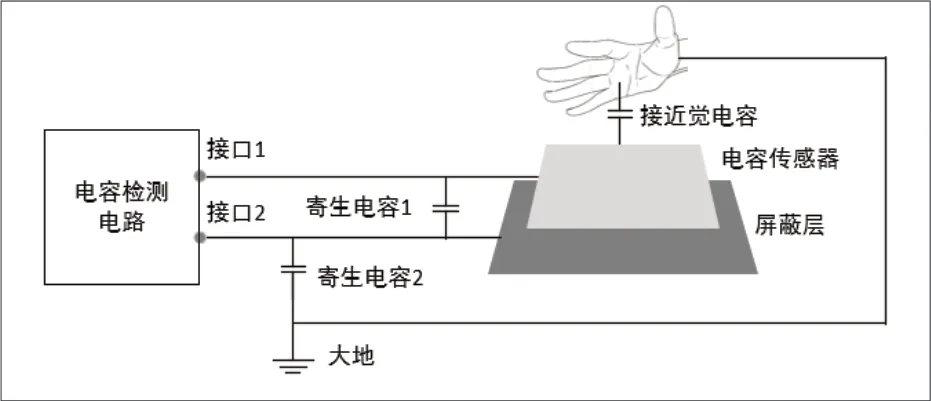
图4 接近觉感知原理
电容决定方式:
其中C是电容, 是电介质常数, 是两极板正对面积, 是静电力常数, 是两极板距离。
与传统的动过视觉、激光等碰前检测技术相比,基于电容的接近觉传感技术具有不受光照条件影响、不怕遮挡、响应速度快等优点等,满足协作机器人安全需要的适应性广、可靠性高和响应速度快的要求。
基于边缘场效应检测原理,电容接近觉传感器可检测接地/非接地的靠近物体,受到传感器尺寸与设计的影响,其检测距离最大可达20cm以上,在解决协作机器人非接触式碰撞感知问题中具有以下优势:
1)平面/曲面结构便于传感器布置在机器人皮肤表面;
2)检测距离完全由电极的相关结构参数有关,易于调节和优化。
3.2 电容检测电路
采用电容接近觉传感原理开发实现非接触式感知的电子皮肤,需要实现感应电容的准确测量[6]。传统的充放电电容检测电路,通过开关通断使传感器电容以一定的频率进行充电与放电,根据输入电压、充放电频率、输出电压与传感器电容之间的相关关系来进行传感器电容测量。该方法由于电路设计简单、充电与检测过程解耦等优势在电容测量领域被广泛使用,但是其缺点也十分明显,由于充放电电容检测电路的宽频带特性,检测电路容易受到外部电磁噪声的影响,即使噪声频率与充放电频率差别很大的噪声,也会对电容的检测带来很大的变化。若使用外部的滤波电路来降低噪声的影响,则不可避免地会增加整体电路设计的复杂度,并且降低电容检测的灵敏度。
为了解决电容接近觉传感器在实际协作机器人应用场景中可能会遇到的内外部复杂的电磁噪声干扰,本文采用基于电感电容谐振回路(LC tank)的电容检测方法[7]。该方法思路如图5所示,传感器电容会在检测电路中与电感元件形成电感电容谐振回路,通过电路振荡发生器对检测电路进行振荡激发并搜索系统的振荡频率,再利用谐振频率与电容间的物理关系计算出传感器电容。
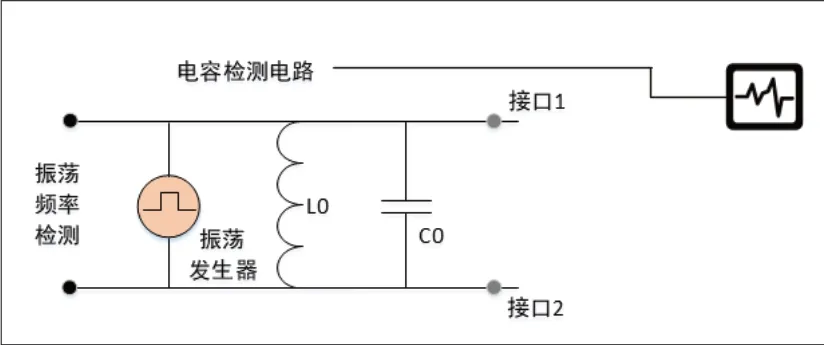
图5 电感电容谐振回路
根据LC振荡频率公式,有:
其中,是LC振荡的频率,L是LC振荡的电感值,C是LC振荡的电容值。
所以,
与传统的充放电检测方法相比,基于电感电容振荡回路的电容检测方法具有窄频带特性,对于与谐振频率不同的干扰信号具有良好的抵抗能力;电路设计简单,可以通过调整电路中的固定电感元件与电容元件调整谐振频率,避开工作环境中的干扰。
4 实验与测试
4.1 电子皮肤接近电容变化分析
在实验中,笔者选用18μH的电感元件与33pF的电容元件构成电容检测电路。当人手靠近电子皮肤的时候,会引起LC振荡电路振荡频率的变化,根据电容换算公式,可以得到图6所示的人手接近过程中电子皮肤电容变化的曲线图。
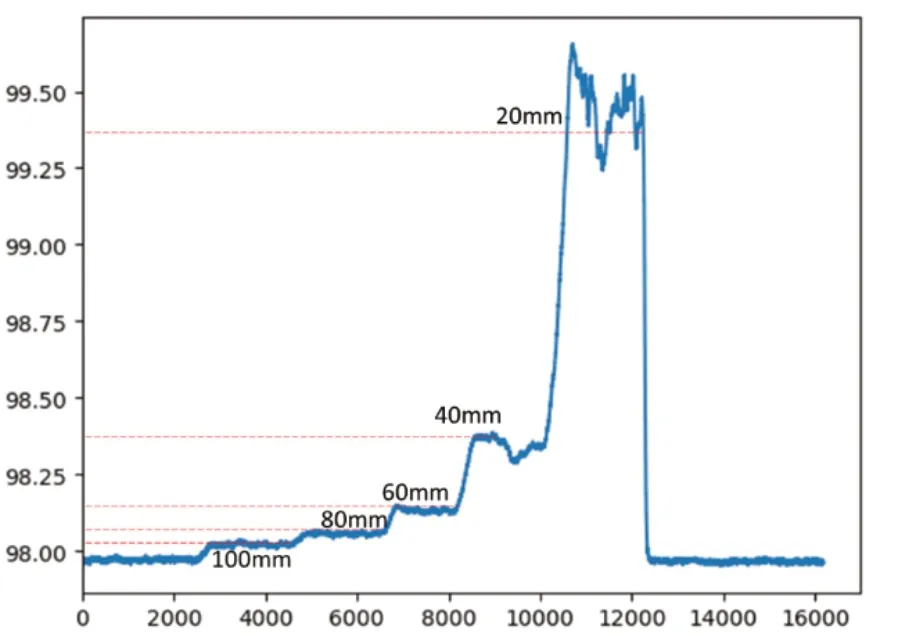
图6 人手接近过程中电子皮肤的电容变化曲线
由图6实验数据可知,人手距离电子皮肤100mm时,仅能与电子皮肤之间形成0.05pF的接近电容;而当距离为20mm时,人手与皮肤之间的接近电容到达了1.4pF。当人手距离皮肤越近,能够引起电容的波动变化越为明显。
在人手距离皮肤100mm时,产生的电容变化信号(0.05pF)已经明显高于传感器的噪声(约为0.01pF),通过该信号可以有效检测到人手的接近。
4.2 实验与结果分析
以0.05pF的接近电容变量作为电子皮肤的接近物有效感知判断依据,针对不同的接近物体材料,笔者获得表2数据。
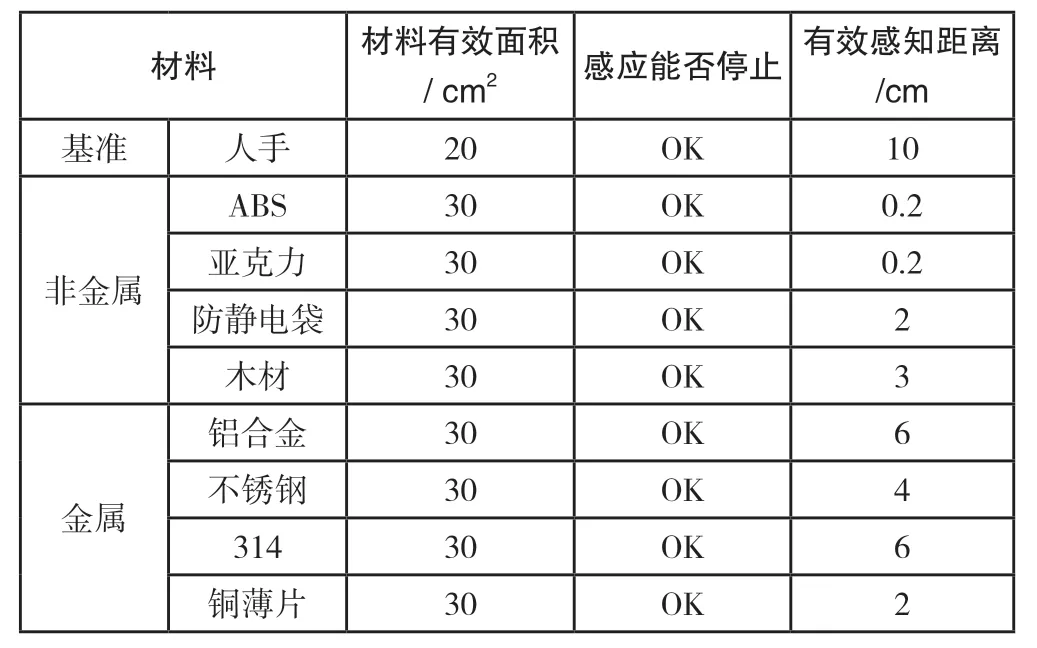
表2 电子皮肤对不同材料的感应测试
相比于其他材质,电子皮肤的接近电容变化对人手最为灵敏,有效感知距离可达10cm;电子皮肤对金属材料和木材的检测效果也相对较好,普遍可达3cm以上。对于非金属的材料中的ABS与亚克力材质的物料,电子皮肤也有一定检测能力,但是有效感知距离较弱(0.2cm)。
4.3 应用案例
在工业化快速发展的当下,汽车消费市场已成为一个体量庞大的行业,在人力成本愈发昂贵的环境下,协作替代人工逐渐成为未来行业发展的重点。在这种转变趋势中,如何更快速地部署人与设备便是协作机器人诞生的初衷。
轻量化、易实施、改造成本低、人机协作等诸多特性使得协作机器人在各行业可发挥重要作用。协作机器人能够将人从高重复性工作、高精度工序、高危环节中解放出来,实现人力成本降低、效率提升、风险下降,显著提升企业生产效率。越疆科技有限公司CR系列协作机器人搭载本文所述的安全皮肤功能,在人机环境中可以发挥良好的功能。
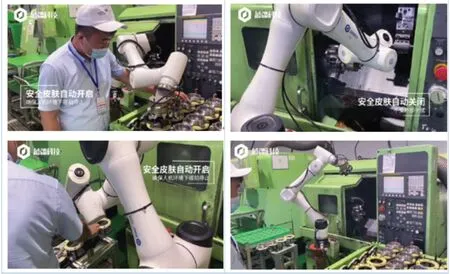
图7 应用案例
在机床上下料的工序中,协作机器人的使用可以让工人远离机械危险区域,而在机床之外,工人可以进入管理区参与一些交互任务,例如需要人工进入协作机器人运行空间内抽检物料,因此,该环境对协作机器人碰撞安全性和预防事故能力要求非常高。在人机环境下,CR系列协作机器人搭载的安全皮肤功能自动开启,碰前停止或自主绕障,实现安全的人机协作,同时保证了生产效率。
5 结论
本文分析了当前机器人碰撞技术的现状,提出一种非接触感知的电子皮肤方法,利用接近电容原理,结合基于电感电容谐振回路(LC tank)的电容检测方法,检测出接近物体产生的接近电容来判断物体的接近情况;设计了一种机器人整机包裹穿戴的电子皮肤,对不同物体产生的接近电容进行了测试和验证。实验结果表明,本文提出的方法有着比较高的接近物体识别成功率,也验证了本文方法的可行性。
实验也发现了本文方法的缺点,即对于非金属和有机材料,能够有效识别的接近距离较近短,因此,未来的研究方向可以针对这些产生接近电容较少的材料进行研究,通过结合其他接近传感方法进行补充。
