水利污染遥感监测方法的设计与仿真研究
2022-07-20张丽军吕大昭高永芹曹志勇
张丽军,吕大昭,高永芹,曹志勇
(1. 河北水利电力学院水利工程系,河北 沧州 061000;2. 北京建筑大学理学院,北京 102627)
1 引言
最近几年,随着我国科学技术的快速发展,遥感技术逐渐发展成为一种能够快速获取地面大规模数据的先进方法,同时这种手段得到广泛应用。其中,在水资源的调查以及宏观监测中,利用卫星遥感图像对水体中的污染特征完成提取的技术已得到了较大范围的应用。相关专家也针对该方面的内容进行了大量的研究,例如王喆等人主要利用高空间分辨率目视解释和短波红外相结合经验模型相结合的方式对研究对象进行水体污染遥感监测。吴世红等人优先对城市黑臭水体的光学性质和影像表观特征进行分析,同时构建黑臭水体遥感识别模型,通过模型进一步完成黑臭水体的监测工作。
由于上述两种方法忽略了对水体遥感图像的预处理,导致监测精度较低。为此,提出一种基于RAISR算法的水利污染遥感监测方法。为验证所提方法的应用效果,设计了仿真。实验结果表明,所提方法能够获取理想的监测结果,应用效果良好。
2 方法
2.1 基于RAISR算法的水利遥感图像预处理
优先通过无人机航空遥感系统获取水利遥感图像,其中遥感图像的成像主要是指高分辨率遥感图像x
通过模糊以及噪声等相关操作获取低分辨率遥感图像Z
的过程,具体如式(1)所示Z
=D
H
+V
(1)
式中,s
表示放大系数;V
表示水利遥感图像中的噪声;H
表示降质矩阵;D
表示下采样算子。其中,水利图像的超分辨处理流程如下所示:
1)构建训练集:
得到高分辨率水利图像(HR),通过降质模型优先对水利遥感图像进行降质处理,得到低分辨率图像(LR),将HR和LR两者进行合并,最终形成图像训练集。
2)学习阶段:
通过HR模型获取水利遥感图像高频和低频两个部分之间的关联性,同时对图像进行分块处理,通过相关理论进行学习,获取相关的先验知识,以此为依据构建学习模型。
3)升级阶段:
通过LR图像在已经建立完成的数据集中搜索最佳滤波器,以此为依据进行图像匹配,获取HR图像。
RAISR算法是一种图像超分辨率新算法,具体速度快、有效避免混叠效应的形成等优势。
RAISR算法在传统学习的基础上,主要对先验阶段存在的问题进行改进,需要改进的内容如下所示:
1)滤波器的选取:
通过最小二乘算法选择符合需求的滤波器,同时计算不同图像之间的欧几里得距离,构建最小化矩阵,详细的计算式如下

(2)
上式中,h
表示滤波器的总数;A
表示由LR
图像的双线插值图像分块构建的矩阵;b
表示HR
图像的像素。矩阵A
的规格是由水利遥感图像中的像素所决定的。使用RAISR算法能够有效避免A过大或者计算量过大,同时还能够提升计算结果的准确性。2)滤波器的分类:
将水利遥感图像块的位置以及角度作为划分依据,对滤波器进行分类处理。
当LR图像经过插值方法完成上采样后,由于图像的像素位置分布不同,以下分别通过各个类型的滤波器对水利遥感图像进行处理,具体如图1所示。

图1 RAISR算法在不同阶段滤波器的技术线路图
结合水利遥感图像的周边像素,分别计算对应的角度、强度以及相关性,同时计算2×n
矩阵。其中,矩阵是由第k
个像素周围的水平g
和垂直g
梯度构成,如式(3)所示
(3)


(4)


(5)
3)滤波器的存储和优化:
滤波器主要是通过哈希机制进行数据存储。其中,哈希表即散列表,主要采用关键码对水利遥感图像的内部结构进行访问,同时也能够通过关键码将所需要的数据映射到列表中进行数据访问,确保数据的查找速度得到有效提升。
RAISR算法需要优先对遥感图像进行超分辨率处理。若单纯对滤波器进行存储等简单的操作,将会增加算法的计算量。为了有效解决上述问题,将哈希方法引入到滤波器中,提升滤波器的存储效率。滤波器组的稳定性和训练图像块数据量的大小存在密切关联,同时图像块也存在相同或者近似的情况,各个图像块也能够进行不同角度的旋转。
4)超分辨图像结构优化:
为了有效避免图像进行超分辨处理后整体结构发生变化,需要再引入处理混合方法,具体的操作步骤为:
①优先计算双线性插值图像的统计变换值;
②将步骤①得到数值取值全部设定为0,同时将其设定为权重,通过权重判定边界,能够进行替换。
在上述分析的基础上,需要通过RAISR算法对水利遥感图像进行预处理,主要划分为两个阶段,分别为学习和升级阶段,以此形成滤波器,通过滤波器完成水利遥感图像的重建。
2.2 水利污染遥感监测
为了清楚掌握滤波器的性质,以下给出对应的一维G
(x
)和二维G
(x
,y
)表达式
(6)
式中,σ
表示像素矩阵;e
表示常数;x
和y
分别表示不同的坐标方向。对水利遥感图像优先进行灰度直方图统计,进而得到对应的图像。
图像分割是目标识别和解析的重要基础,同时在图像处理过程中处于核心环节。一般情况下,水利遥感图像的分割是根据图像的颜色和灰度等相关系数为依据进行划分的。
假设水利遥感图像展现的是双峰谷的形态特征,则说明图像所拥有所占面积和背景所占面积之间存在较大的差异。针对已经给定的灰度水利遥感图像,需要在图像中任意选择一个像素点,同时将其设定为随机变量,得到对应的概率密度P
(x
,θ
)。假设图像中含有被污染的水体,在水体部分的像素值明显低于其部分。若水利遥感图像中水体被污染部分和未被污染部分均服从高斯分布,设定污染水体所占的像素比例为α
,剩余部分所占的比例为α
,则概率密度对应的表达式为
(7)
式中,μ
和μ
分别表示模型的相关参数;N
表示目标区域的像素总数。为更好实现水利污染区域的自动提取,需要将人工标注环节提出。以下主要借助高斯混合模型实现,同时重新定义P
(I
|l
=j
),具体的计算式如下
(8)

EM
算法是一种迭代算法,主要能够划分为以下几个步骤:①优先求解出似然函数在对数条件下的期望值。
②选取最大期望值。
对于已经选定的双混合高斯模型,将图像中的灰度值全部设定为已知变量,表示为x
={x
,x
,…,x
},根据样本x
组建似然函数L
(θ
),具体如式(9)所示
(9)
对L
(θ
)进行对数提取后,再进行求导,获取极值(InL
(θ
)),将其表示为以下的形式
(10)
为了表示μ
,需要对式(10)进行简化处理,则有
(11)

(12)


(13)
在上述分析的基础上,需要对参数值进行初始化处理,同时代入到对应的公式中进行求解。以下详细给出水利污染遥感监测的具体操作步骤:
①通过水利遥感图像建立高斯混合模型,同时根据计算确定最佳阈值,采用阈值得到模型的初始参数。
②绘制水利遥感图像的直方图,并且借助最大累间方差计算区域,获取模型的基本参数。
③对初始参数进行EM迭代计算,直至满足约束条件。
④通过高斯混合模型对权重取值进行计算,并且采用最大流最小分割算法对水利遥感图像进行分割。
⑤根据步骤④得到的分割结果提取水利污染遥感特征,完成水利污染遥感监测。
3 仿真研究
为验证所提基于RAISR算法的水利污染遥感监测方法的有效性,对M城市矿区废水池的水利污染情况进行监测研究。
优先对矿区的水体进行波谱测试分析,具体的结果如图2所示:

图2 M城市矿区废水池水体的反射波普曲线图
分析图2可知,M城市矿区水体的反射率总体较低,其中距离河岸越近,水体的反射率越低。
利用图3给出M城市矿区废水池池口处水体的反射波普曲线

图3 M城市矿区废水池池口处水体的反射波普曲线
分析图3中的实验数据可知,随着距离河岸距离的持续增加,废水池池口处水体的反射率也开始逐渐增加,并且在波长为900nm处出现第一个高峰,反射率越高,说明水体污染越严重。
下面重点对水体中的悬浮物进行监测,对悬浮物实测浓度值和反射率两者之间完成相关分析,利用图4给出具体的实验对比结果。

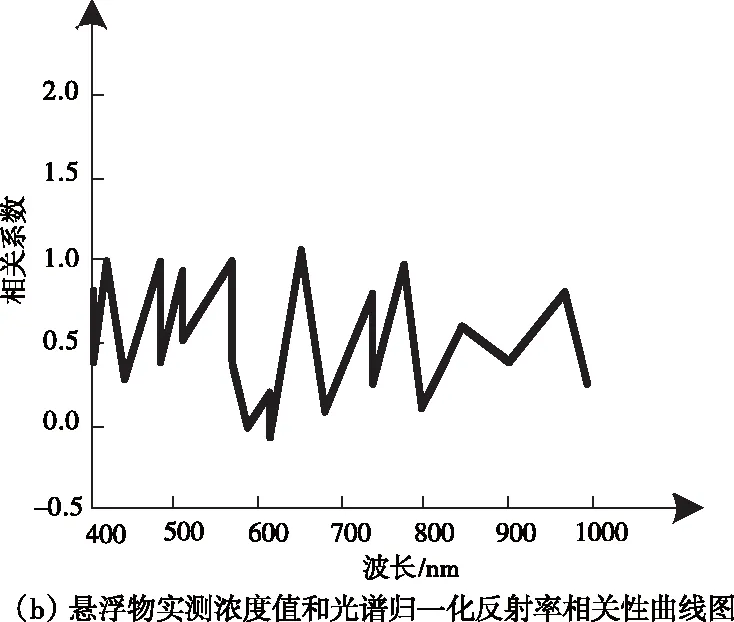
图4 相关分析实验测试
分析图4中的实验数据可知,通过最大正相关系数和最小负相关系数所对应的光谱反射率,能够更好反映两者之间的关联性,有效降低由外界干扰所引发的监测误差,确保所提方法能够更好实现水利污染遥感监测。
为了进一步验证所提方法的优越性,以下实验测试选取文献[3]方法和文献[4]方法作为对比对象,分别对比三种方法的监测精度,具体实验结果如表1所示。

表1 不同方法的监测精度对比结果
分析表1中的实验数据可知,所提方法的监测值和实际悬浮物浓度更加接近,而文献[3]方法和文献[4]方法的监测值和真实值之间的差异较大。充分证明所提方法能够获取精度更高的监测结果,同时也说明在所提方法中采用RAISR算法对水利图像进行预处理是可行的。
4 结束语
针对传统监测方法存在的不足,结合RAISR算法,提出基于RAISR算法的水利污染遥感监测方法。经实验测试证明,所提方法能够以较高的精度完成水利污染遥感监测,具有较强的实用性。
由于污染遥感监测方面的内容研究范围比较广,虽然所提方法已取得一些理想的应用效果,但是受到时间以及空间等多方面因素的限制,所提方法仍需进一步提升,后续将重点针对以下几方面的内容展开研究:
1)加强遥感图像方面的研究,使其能够得到更大的进步空间。
2)实验未深入验证所提方法的耗时,后续将针对该问题进一步分析和验证。
3)补充水利遥感图像分割方面内容,引进更多先进的理论和知识,以获取更加准确的图像分割结果。